 化工儀器網(wǎng)
化工儀器網(wǎng)










詳細介紹
西門子6SL3210-1KE17-5UB1
 | 6SL3210-1KE17-5UB1 SINAMICS G120C 標(biāo)稱功率:3.0kW 有 150% 過載 3 秒 380-480V+10/-20% 三相交流 47-63Hz 未過濾 I/O-接口: 6DI,2DO,1AI,,1AO 集成式安全轉(zhuǎn)矩切斷 現(xiàn)場總線集成: USS/MODBUS RTU,; 防護等級 IP20/UL Open Typ 尺寸:FSA 196x 73x 203(高x寬x深) 外部 24V |
在進行PLC編程之前,請確認USS協(xié)議庫已經(jīng)安裝,,如圖1-1,。
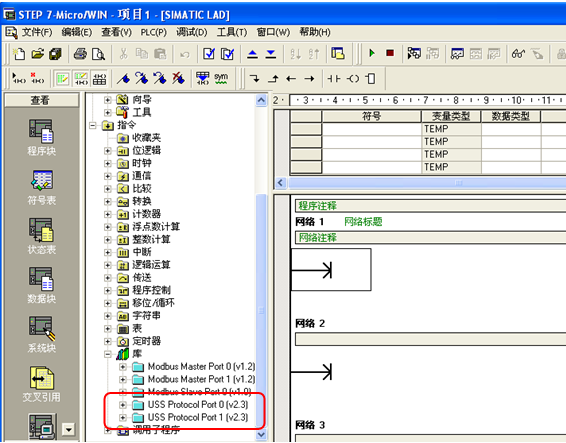
圖1-1
2.2 S7-200與控制單元間的接線

圖1-2
CU240E-2的控制端子排如圖1-2,從控制單元底部看,,共有5個接線端子,,其中2號端子為RS485P,3號端子為RS485N,,用于通信數(shù)據(jù)的發(fā)送和接收,。

圖1-3
S7-200作為USS通信主站,其通信端口和變頻器從站的接線如圖1-3,。在通信網(wǎng)絡(luò)的首,、末端需要使用終端電阻。
對于S7-200,,需要在通信端口端子3和8之間,,連接一阻值為120歐姆的電阻。
對于變頻器,,把通信網(wǎng)絡(luò)末端的CU240E-2終端電阻撥碼開關(guān)撥到ON位置即可(位置在圖1-1中,,標(biāo)號⑨);中間位置的CU240E-2,,終端電阻撥碼開關(guān)必須撥到OFF位置,。
本例中,S7-200(CPU224 XP CN)使用通信端口Port 0和變頻器進行通信,。
2 變頻器設(shè)置
2.1 地址設(shè)置
變頻器的USS通信地址可以通過控制單元上的總線地址撥碼開關(guān)(位置在圖1-1中,,標(biāo)號⑤)進行設(shè)置。當(dāng)?shù)刂窊艽a開關(guān)的位置都為OFF時,,也可用過參數(shù)P2021進行設(shè)置,。
2.2 參數(shù)設(shè)置
除了設(shè)置地址之外,還需要對變頻器一些基本的通信參數(shù)進行設(shè)置,,才可以進行USS通信,,如表2-1所示:
表2-1
| 參數(shù) | 描述 |
| P0015 = 21 | 變頻器宏程序。 15:通過現(xiàn)場總線控制 設(shè)置方法:P10=1 → P15=21 → P10=0 |
| p2030 = 1 | 現(xiàn)場總線協(xié)議選擇 1:USS協(xié)議 |
| p2020 | 現(xiàn)場總線波特率 設(shè)置范圍是 4800 bit/s … 187500 bit/s,,出廠為 19200 bit/s 本例使用:6(9600) |
| P2021 | USS地址(在地址撥碼開關(guān)都為OFF時,,才有效) 本例使用:3 |
| p2040 | 過程數(shù)據(jù)監(jiān)控時間 指沒有收到過程數(shù)據(jù)時發(fā)出報警的延時。 注:必須根據(jù)從站數(shù)量,、總線波特率加以調(diào)整,,出廠設(shè)置為 100 ms。 |
3 PLC編程
3.1使用USS協(xié)議的初始化模塊初始化S7-200的PORT0端口

圖3-1
功能塊說明:
注: 此處以及下文的“功能塊說明”僅介紹了功能塊內(nèi)的主要管腳
功能,未說明的管腳功能,,請參考Step7 Micro-Win V4.0軟件的
幫助文件,。
輸入:
EN:使能。每次改變通訊狀態(tài)都應(yīng)該執(zhí)行一次初始化指令,,EN信號應(yīng)該通過脈沖激活,。本例中,Port 0端口一直作為USS通信端口使用,,因此使用SM0.1初始化一次即可,。
Mode:1——為端口0USS協(xié)議,并啟用該協(xié)議,。
Baud:波特率,,應(yīng)與變頻器定義的波特率*。本例中,,使用9600,。
Active:激活驅(qū)動器地址,參考圖3-2,。本例中,,使用2#1000,即激活驅(qū)動器地址3,。
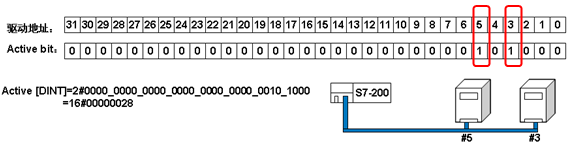
圖3-2 激活驅(qū)動器地址3和5
3.2 使用USS_CTRL功能塊控制變頻器的運行
3.2.1 USS_CTRL功能塊編程
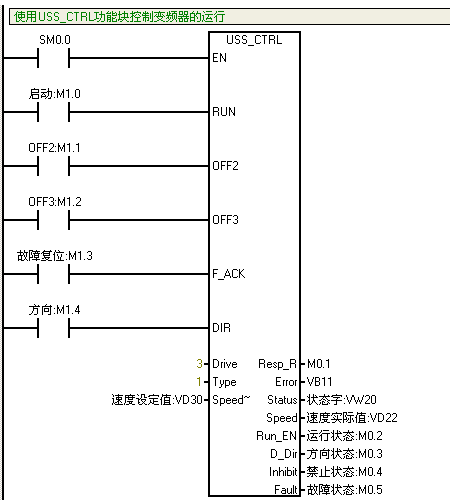
圖3-3
功能塊說明:
輸入:
EN:通常情況總是激活,。
RUN:啟動變頻器。0-停止,;1-啟動,。
OFF2:自由停車。0-正常,;1-自由停車,。西門子6SL3210-1KE17-5UB1
OFF3:快速停止,。0-正常,;1-快速停止。
F _ACK:故障復(fù)位,。通過上升沿對變頻器進行故障復(fù)位,。
DIR:運行方向。0-正轉(zhuǎn),;1-反轉(zhuǎn)
Drive:變頻器USS地址,,0-31。本例使用3,。
Speed~:速度設(shè)定值,,通過百分比進行設(shè)定,范圍 -200.0~~200.0%。
輸出:
Error:錯誤代碼,。有關(guān)錯誤代碼說明,,請參考表3-1。
Status:變頻器返回的狀態(tài)字,。有關(guān)G120變頻器狀態(tài)字,,請參考《參數(shù)手冊》有關(guān)r52參數(shù)的說明。
Speed:變頻器返回的速度實際值的百分比,。
Run_EN:變頻器運行狀態(tài),。0-停止;1-運行,。
D_Dir:變頻器運行方向,。0-正轉(zhuǎn);1-反轉(zhuǎn),。
Inhibit:變頻器禁止位狀態(tài),。0-正常;1-禁止,。
Fault:變頻器故障狀態(tài),。0-正常;1-故障,。
表3-1
| 錯誤代碼 | 說明 |
| 0 | 無錯,。 |
| 1 | 驅(qū)動器不應(yīng)答。 |
| 2 | 檢測到來自驅(qū)動器的應(yīng)答中檢驗和錯誤,。 |
| 3 | 檢測到來自驅(qū)動器的應(yīng)答中校驗錯誤,。 |
| 4 | 來自用戶程序的干擾造成錯誤。 |
| 5 | 嘗試非法命令,。 |
| 6 | 提供非法驅(qū)動器地址,。 |
| 7 | 未為USS協(xié)議設(shè)置通訊端口。 |
| 8 | 通訊端口正在忙于處理指令,。 |
| 9 | 驅(qū)動器速度輸入超出范圍,。 |
| 10 | 驅(qū)動器應(yīng)答長度不正確。 |
| 11 | 驅(qū)動器應(yīng)答*個字符不正確,。 |
| 12 | 驅(qū)動器應(yīng)答中的字符長度不受USS指令支持,。 |
| 13 | 錯誤的驅(qū)動器應(yīng)答。 |
| 14 | 提供的DB_Ptr地址不正確,。 |
| 15 | 提供的參數(shù)號不正確,。 |
| 16 | 選擇了無效協(xié)議。 |
| 17 | USS激活,,不允許改動,。 |
| 18 | 了非法波特率,。 |
| 19 | 無通訊:驅(qū)動器未設(shè)為激活。 |
| 20 | 驅(qū)動器應(yīng)答中的參數(shù)或數(shù)值不正確或包含錯誤代碼,。 |
| 21 | 返回一個雙字數(shù)值,,而不是請求的字數(shù)值。 |
| 22 | 返回一個字數(shù)值,,而不是請求的雙字數(shù)值,。 |
3.2.2 分配庫存儲區(qū),編譯,,下載,。
在編譯程序之前,選擇 “程序塊” ->“ 庫”,, 右鍵點擊,,選擇“庫存儲區(qū)”。在彈出的對話框中點擊 “建議地址” 選擇V存儲區(qū)的地址后點擊 “OK”退出,。如圖3-4,。
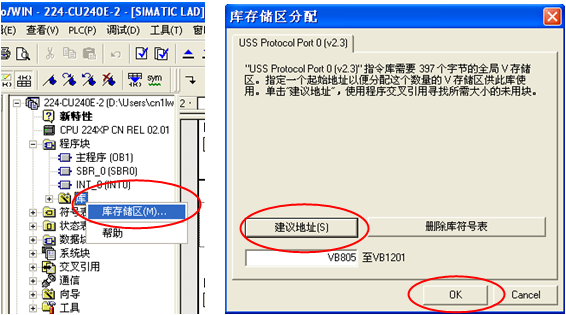
圖3-4
分配庫存儲區(qū)之后,編譯并下載,。
3.2.3 控制變頻器運行,。
此時,即可通過USS通信,,控制變頻器的運行,。
例,
打開狀態(tài)表監(jiān)控,,如圖3-5,。
M1.0為變頻器的啟停控制位,,初始值為0,,從0強制為1后,變頻器即可運行,。
VD30為變頻器的速度設(shè)定值,,強制為20.0后,變頻器將以20%的速度運行,。
VW20,,VD22分別為變頻器返回的狀態(tài)字和速度實際值,。

圖3-5
3.3 讀寫參數(shù)
根據(jù)參數(shù)的不同數(shù)據(jù)類型,,需要使用不同的功能塊進行變頻器參數(shù)的讀寫。下文中,,將通過舉例進行介紹,。
注:目前,,USS協(xié)議庫的參數(shù)讀寫功能塊,僅適用于讀寫參數(shù)號在3999以下的參數(shù),。對于參數(shù)號在4000以上的參數(shù),,如果要進行讀寫,可參考《操作說明》,,7.4.2.4節(jié),,使用自由口編程的方式進行讀寫,在此不作介紹,。
G120《操作說明》下載地址:30563628
3.3.1 使用USS_RPM_R功能塊讀取浮點型參數(shù)

圖3-6
功能塊說明:
輸入:
EN:需要讀取參數(shù)時激活,。
XMT_~:操作請求。使用上升沿激活,。
Drive:變頻器USS地址,。本例中,使用3,。
Param:要讀取的參數(shù)號,。本例中,讀取參數(shù)r27(輸出電流實際值),。
Index:參數(shù)下標(biāo),。本例中,r27無下標(biāo),,必須定義為下標(biāo)0,。
輸出:
Value:返回的參數(shù)值。
手冊分類
S7-1500 系統(tǒng)為大家提供了很多可以參考和學(xué)習(xí)的手冊,,這些手冊數(shù)目和種類眾多,,剛開始接觸S7-1500 系統(tǒng)的用戶可能無法快速找到自己需要的手冊,在這里向大家簡單介紹一下S7-1500手冊的分類,。
總的來說,,S7-1500自動化系統(tǒng)提供的手冊分為以下三類:
系統(tǒng)手冊:描述某個產(chǎn)品系列的整體信息,包括該產(chǎn)品系列的組件,,硬件配置,、安裝 、接線規(guī)則 ,,調(diào)試和維護以及相關(guān)技術(shù)規(guī)范和尺寸圖,。
功能手冊:介紹了各種產(chǎn)品使用時需要了解的概念,背景知識和各種功能的實現(xiàn)方法,。
設(shè)備手冊:詳細介紹產(chǎn)品組件的特性,,技術(shù)參數(shù),使用及診斷方法,。
下面我們通過一個簡單的實例來介紹一下S7-1500 選擇相關(guān)手冊的方法,。
例如,,在S7-1500 CPU中通過程序處理一個數(shù)字量輸入模塊DI 16x24VDC HF的硬件中斷,我們需要查閱哪些手冊呢:
1.首先我們需要了解該模塊都可以提供哪些硬件中斷,,這部分內(nèi)容可以參考相關(guān)I/O模塊的設(shè)備手冊,。
在本例中我們查閱的是《S7-1500/ET 200MP DI 16x24VDC HF 數(shù)字量輸入模塊》設(shè)備手冊,在該手冊的“中斷/診斷報警”章節(jié)我們可以知道這款模塊可以由那些類型的信號來觸發(fā)硬件中斷,。
除此之外,,在設(shè)備手冊中還可以查閱到相關(guān)模塊的技術(shù)參數(shù)(如可測量的信號類型、供電電壓),,接線圖,,以及尺寸圖等詳細信息。

2.除了組態(tài)模塊的硬件中斷,,我們還需要了解在模塊觸發(fā)硬件中斷后,,CPU如何處理這些中斷的,這部分內(nèi)容可以在系統(tǒng)手冊中找到,。
在《S7-1500 自動化系統(tǒng)》手冊的“事件和OB”章節(jié)描述了不同事件對應(yīng)的不同OB,,以及不同OB的優(yōu)先級和運行特性。初次之外,,在S7-1500系統(tǒng)手冊中還可以了解到S7-1500自動化系統(tǒng)的新特性,,所有支持的模塊,系統(tǒng)安裝和接線規(guī)則,,以及相關(guān)模塊的技術(shù)規(guī)范和尺寸圖等系統(tǒng)相關(guān)的信息,。
3.如果希望了解更多關(guān)于OB執(zhí)行方式,中斷產(chǎn)生系統(tǒng)開銷(響應(yīng)時間),,我們同樣可以通過相應(yīng)的功能手冊查找到相關(guān)的信息,。
在功能手冊《S7-1500、ET 200MP 和 ET 200SP 循環(huán)和響應(yīng)時間》中就詳細描述了不同 OB 的執(zhí)行方式以及不同中斷的響應(yīng)時間,;同樣在功能手冊《S7-1500,、ET 200MP、ET 200SP模擬值處理》還可以了解模擬信號測量中許多參數(shù)的概念和解釋,。

 化工儀器網(wǎng)
化工儀器網(wǎng)