 化工儀器網(wǎng)
化工儀器網(wǎng)










詳細(xì)介紹
西門(mén)子四芯電纜
信譽(yù)*,,客戶(hù)至上是公司成立之初所確立的宗旨,在公司的嚴(yán)格要求和員工們不折不扣地貫徹執(zhí)行下發(fā)展延續(xù)至今,。“假一罰十”一直是我公司的主動(dòng)承諾,。
承諾一:1、保證全新*
承諾二:2,、保證安全準(zhǔn)時(shí)發(fā)貨
承諾三:3,、保證售后服務(wù)質(zhì)量
流程一:1、客戶(hù)確認(rèn)所需采購(gòu)產(chǎn)品型號(hào)
流程二:2,、我方會(huì)根據(jù)詢(xún)價(jià)單型號(hào)查詢(xún)價(jià)格以及交貨期,,擬一份詳細(xì)正規(guī)報(bào)價(jià)單
流程三:3,客戶(hù)收到報(bào)價(jià)單并確認(rèn)型號(hào)無(wú)誤后訂購(gòu)產(chǎn)品
流程四:4、報(bào)價(jià)單負(fù)責(zé)人根據(jù)客戶(hù)提供型號(hào)以及數(shù)量擬份銷(xiāo)售合同
流程五:5,、客戶(hù)收到合同查閱同意后蓋章回傳并按照合同銷(xiāo)售額匯款到公司開(kāi)戶(hù)行
流程六:6,、我公司財(cái)務(wù)查到款后,業(yè)務(wù)員安排發(fā)貨并通知客戶(hù)跟蹤運(yùn)單
1 路徑插補(bǔ)功能簡(jiǎn)介
1.1 基本概念
插補(bǔ)的概念源于數(shù)控機(jī)床,。在數(shù)控機(jī)床中,,刀具不能?chē)?yán)格地按照要求加工的曲線(xiàn)(直線(xiàn))運(yùn)動(dòng),只能用折線(xiàn)軌跡逼近所要加工的曲線(xiàn),。機(jī)床數(shù)控系統(tǒng)依照一定方法確定刀具運(yùn)動(dòng)軌跡的過(guò)程,,叫做插補(bǔ)。也可以說(shuō),,已知曲線(xiàn)上的某些數(shù)據(jù),,按照某種算法計(jì)算已知點(diǎn)之間的中間點(diǎn)的方法,或者稱(chēng)為“數(shù)據(jù)點(diǎn)的密化”,。插補(bǔ)的動(dòng)作過(guò)程:在每個(gè)插補(bǔ)周期(極短時(shí)間,,一般為毫秒級(jí))內(nèi),根據(jù)指令,、進(jìn)給速度計(jì)算出一個(gè)微小直線(xiàn)段的數(shù)據(jù),,刀具沿著微小直線(xiàn)段運(yùn)動(dòng),經(jīng)過(guò)若干個(gè)插補(bǔ)周期后,,刀具從起點(diǎn)運(yùn)動(dòng)到終點(diǎn),,完成輪廓的加工。
路徑運(yùn)動(dòng)初來(lái)自于機(jī)器人和CNC領(lǐng)域,,用機(jī)器人編程語(yǔ)言或G-Code編程,。它是指在多維空間中,通過(guò)一組軸的協(xié)作動(dòng)作,,各軸之間無(wú)主從之分,,它們按照設(shè)定的動(dòng)態(tài)響應(yīng)特性,實(shí)現(xiàn)路徑對(duì)象從起點(diǎn)到終點(diǎn)的的路徑軌跡運(yùn)動(dòng),。
路徑插補(bǔ)產(chǎn)生路徑的運(yùn)行軌跡,,計(jì)算插補(bǔ)周期內(nèi)的路徑插補(bǔ)點(diǎn),并通過(guò)機(jī)械運(yùn)動(dòng)系統(tǒng)轉(zhuǎn)換獲得對(duì)應(yīng)插補(bǔ)周期內(nèi)插補(bǔ)點(diǎn)的各路徑軸設(shè)定值,。
隸屬于機(jī)械運(yùn)動(dòng)系統(tǒng)的單獨(dú)軸在S7 technology中被為路徑軸,,路徑軸通過(guò)路徑對(duì)象執(zhí)行路徑運(yùn)動(dòng)。參考圖1 路徑軸與路徑對(duì)象,。
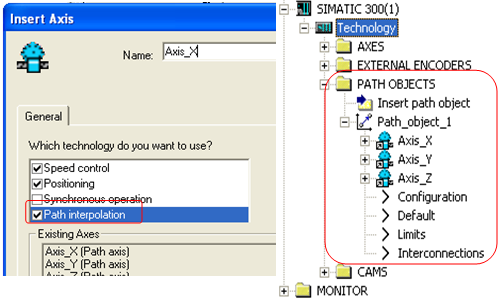
圖1 路徑軸與路徑對(duì)象
1.2 S7-Technology 路徑功能特點(diǎn)
S7-Technology 路徑插補(bǔ)功能概述:
> 從S7-Technology V4.2開(kāi)始
> 允許進(jìn)行3軸插補(bǔ)操作
> 路徑插補(bǔ)可以通過(guò)直線(xiàn),、圓弧、多項(xiàng)式表示實(shí)現(xiàn)
> Move Path命令可以組成連續(xù)運(yùn)動(dòng)
> 支持多種機(jī)械運(yùn)動(dòng)學(xué)模型
> 可以與外部位置值同步,,實(shí)現(xiàn)傳送帶跟蹤功能
S7-Technology 路徑插補(bǔ)的技術(shù)特點(diǎn):
> 所有的路徑軸都相互同步移動(dòng)
> 所有的路徑軸都同時(shí)到達(dá)目標(biāo)位置
> 路徑軌跡的移動(dòng),,將會(huì)始終是以一個(gè)固定的合成速度進(jìn)行 (如果動(dòng)態(tài)
特性限制沒(méi)有被超越)
> 低速度性能的軸,,決定了整個(gè)軌跡的高動(dòng)態(tài)特性
路徑差補(bǔ)可以執(zhí)行多3軸之間的2D或者3D的線(xiàn)性、圓弧或者多項(xiàng)式插補(bǔ),,路徑差補(bǔ)工藝對(duì)象(TO) ,,適用于機(jī)械運(yùn)動(dòng)學(xué)控制范疇,一個(gè)共同的系統(tǒng)中,,可以存在多個(gè)機(jī)械運(yùn)動(dòng)學(xué)控制結(jié)構(gòu),。同步于路徑軸的“同步軸”,仍然可以實(shí)現(xiàn)同步控制,,例如,,旋轉(zhuǎn),凸輪開(kāi)關(guān),,測(cè)量功能,。通過(guò)圖形化編輯器,可以簡(jiǎn)便地設(shè)置機(jī)械運(yùn)動(dòng)學(xué)控制系統(tǒng)的參數(shù),;通過(guò)動(dòng)態(tài)特性輪廓窗口,,可以輕松定義路徑的動(dòng)態(tài)特性;通過(guò)軌跡點(diǎn)表格,,可以輕松定義路徑差補(bǔ),計(jì)劃目的地路徑,。另外還可以定義保護(hù)防撞區(qū)域和實(shí)現(xiàn)傳送帶位置的精確跟蹤,。
1.3 機(jī)械運(yùn)動(dòng)系統(tǒng)的選擇
T-CPU 所實(shí)現(xiàn)運(yùn)動(dòng)學(xué),等同于人們過(guò)去所熟悉機(jī)械運(yùn)動(dòng)學(xué),??梢詫⑺鼈兎譃槿缦聝煞N不同的類(lèi)型。參考圖2 在 T-CPU 中集成的機(jī)械運(yùn)動(dòng)學(xué),。
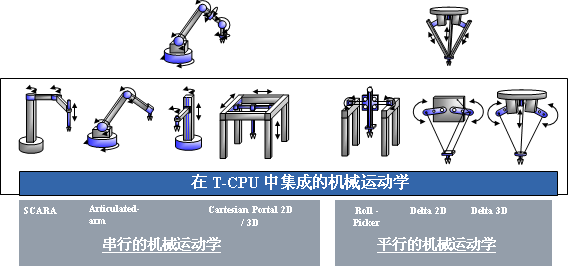
圖2 在 T-CPU 中集成的機(jī)械運(yùn)動(dòng)學(xué)
不同的機(jī)械運(yùn)動(dòng)系統(tǒng)可以實(shí)現(xiàn)TCP (Tool Center Point,,工具中心點(diǎn)或機(jī)械運(yùn)動(dòng)端點(diǎn))相同的路徑運(yùn)動(dòng)功能。盡管在某些情況下,,不同的機(jī)械運(yùn)動(dòng)系統(tǒng)可實(shí)現(xiàn)相同的路徑運(yùn)動(dòng),,但是,如果機(jī)械運(yùn)動(dòng)系統(tǒng)選擇不合理,,將有可能無(wú)法完成的路徑功能,。所以,必須根據(jù)實(shí)際的工藝需求選擇合適的機(jī)械運(yùn)動(dòng)系統(tǒng),,并在工廠布局中考慮該機(jī)構(gòu)的的合理安裝位置,。參考圖3 不同機(jī)械系統(tǒng)的轉(zhuǎn)化。
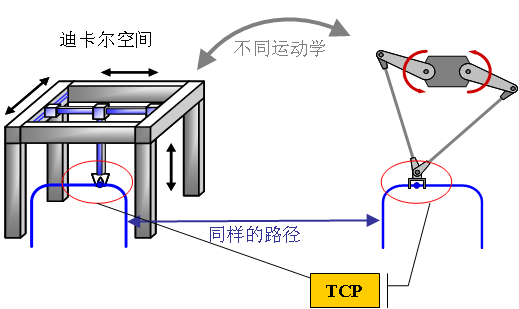
圖3 不同機(jī)械系統(tǒng)的轉(zhuǎn)化
2 路徑插補(bǔ)的實(shí)現(xiàn)方法
2.1 運(yùn)動(dòng)學(xué)模型簡(jiǎn)介
常用的運(yùn)動(dòng)學(xué)模型請(qǐng)參考圖 4 運(yùn)動(dòng)學(xué)模型,。
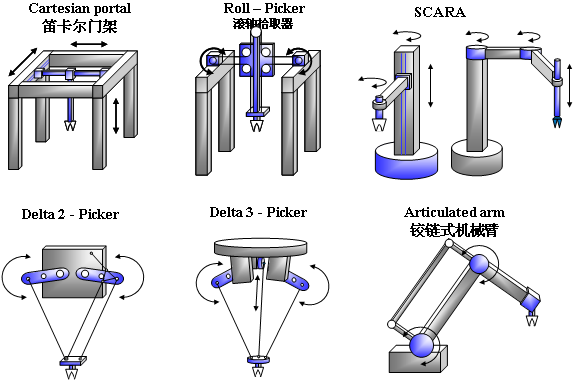
圖 4 運(yùn)動(dòng)學(xué)模型
下面介紹一些常用的運(yùn)動(dòng)學(xué)模型,。直角坐標(biāo)機(jī)器人 (英文名:Cartesian coordinate robot),,大型的直角坐標(biāo)機(jī)器人也稱(chēng)桁架機(jī)器人或龍門(mén)式機(jī)器人,由多個(gè)運(yùn)動(dòng)自由度建成空間直角關(guān)系的,、多用途的操作機(jī)器,。工作的行為方式主要是通過(guò)完成沿著X、Y,、Z軸上的線(xiàn)性運(yùn)動(dòng),。因末端操作工具的不同,直角坐標(biāo)機(jī)器人可以非常方便的用作各種自動(dòng)化設(shè)備,,完成如焊接,、搬運(yùn)、上下料,、包裝,、碼垛、拆垛,、檢測(cè),、探傷、分類(lèi),、裝配,、貼標(biāo)、噴碼,、打碼,、(軟仿型)噴涂等一系列工作。參考圖5 直角坐標(biāo)機(jī)器人,。
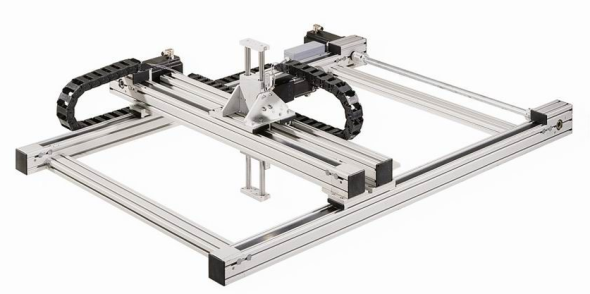
圖5 直角坐標(biāo)機(jī)器人
SCARA 機(jī)器人(Selective Compliance Assembly Robot Arm)是一種圓柱坐標(biāo)型的特殊工業(yè)機(jī)器人,。有3個(gè)旋轉(zhuǎn)關(guān)節(jié),其軸線(xiàn)相互平行,,在平面內(nèi)進(jìn)行定位,,另一個(gè)關(guān)節(jié)是移動(dòng)關(guān)節(jié),用于完成機(jī)械末端在垂直平面的運(yùn)動(dòng),。SCARA機(jī)器人在x,y方向上具有良好的順從性,、靈活性,而在Z軸方向具有良好的剛度,,此特性特別適合于裝配工作,。SCARA機(jī)器人廣泛應(yīng)用于塑料工業(yè)、汽車(chē)工業(yè),、電子產(chǎn)品工業(yè),、藥品工業(yè)和食品工業(yè)等領(lǐng)域。它的主要職能是搬取零件和裝配工作,。 參考圖6 SCARA 機(jī)器人,。
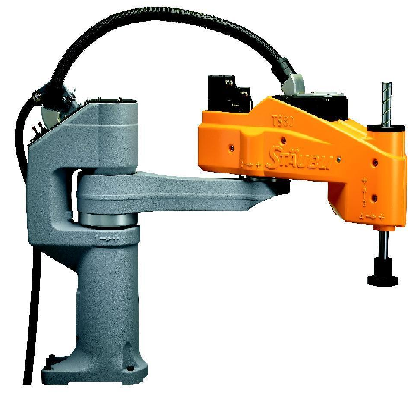
圖6 SCARA 機(jī)器人
鉸鏈型機(jī)械臂:有很高的自由度,,可以多至5~6軸,適合于幾乎任何軌跡或角度的工作,,可以自由編程,,完成全自動(dòng)化的工作, 提高生產(chǎn)效率;可以代替很多不適合人力完成,、有害身體健康的復(fù)雜工作,,比如,汽車(chē)外殼點(diǎn)焊,。參考圖 7 鉸鏈型機(jī)械臂,。
 西門(mén)子四芯電纜
西門(mén)子四芯電纜
圖7鉸鏈型機(jī)械臂
Delta 3D機(jī)器人:外形酷似一只蜘蛛,這種*的幾何結(jié)構(gòu)賦予了它們質(zhì)量輕,,強(qiáng)度大,,輕便靈活,節(jié)省空間,,高速,,敏捷;適用于高速分揀,。參考圖8 Delta 3D機(jī)器人,。

圖8 Delta 3D機(jī)器人
2.2 路徑插補(bǔ)實(shí)現(xiàn)方法
首先需要做軸的定義,選擇“Path interploation”,。參考圖 9 路徑軸的定義,。
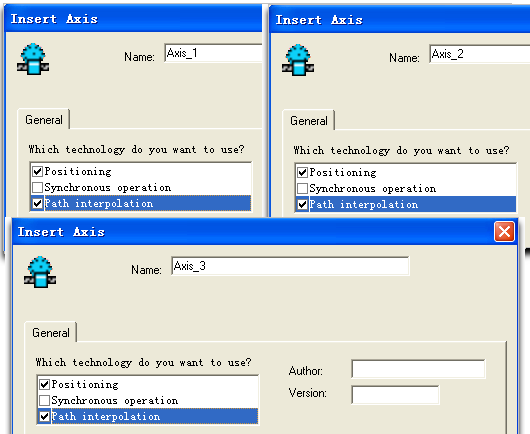
圖9 路徑軸的定義
1. 模板介紹
1.1 總覽
ET200S 1 步進(jìn)模板輸出脈沖來(lái)控制步進(jìn)電機(jī) ,輸出脈沖的數(shù)量決定步進(jìn)電機(jī)的運(yùn)動(dòng)距離,,輸出脈沖的頻率決定步進(jìn)電機(jī)的速度。
模板訂貨號(hào): 6ES7138-4DC00-0AB0
1.2 模板參數(shù)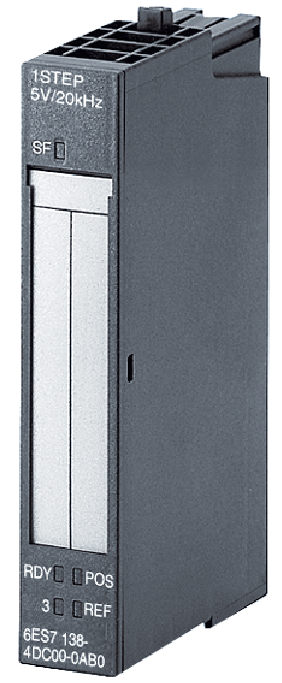
圖. 1: 步進(jìn)電機(jī)模板
- 1 通道,,可控制1個(gè)步進(jìn)電機(jī)
- 數(shù)字量輸入的參考點(diǎn)開(kāi)關(guān)
- 外部停止或者外部脈沖使能數(shù)字輸入
- 脈沖和方向信號(hào)時(shí)RS422的差分輸出模式
- 大輸出頻率: 204kHZ
- 大脈沖數(shù): 1048575
- 4 LED 狀態(tài)指示燈
- 2 操作模式:尋找參考點(diǎn)和增量模式
2. 模板接線(xiàn)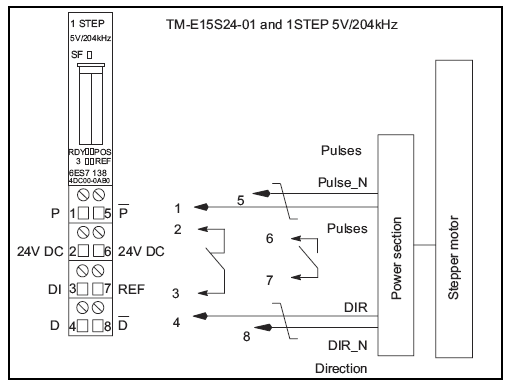
圖. 2: 步進(jìn)模板接線(xiàn)圖
- 端子1和5:脈沖差分信號(hào)
- 端子4和8:差分輸出的方向信號(hào)
- 端子2和3:外部停止或者外部脈沖使能數(shù)字量輸入ID,。(功能選擇見(jiàn) 4.2 )
- 端子6和7:數(shù)字量輸入?yún)⒖键c(diǎn)開(kāi)關(guān)
3. 硬件配置
步進(jìn)模板可以安裝在ET 200S接口模板或者 ET200S CPU后面。
本文使用 IM151-7 CPU 為例,。
表 1: 軟件和硬件配置
圖. 3: ET200S 站的配置圖
4. 硬件和參數(shù)設(shè)置
4.1 硬件配置
1) 根據(jù)圖. 2 和圖. 3完成ET200S的接線(xiàn)
2) 打開(kāi)STEP7,,創(chuàng)建一個(gè)新項(xiàng)目,并插入一個(gè)S7-300站
3) 從硬件目錄中選擇IM151-7 CPU直接拖拽到站配置窗口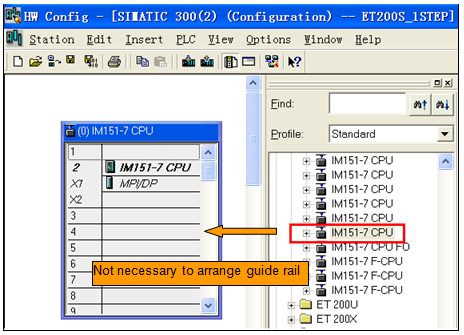
圖. 4: 插入IM151-7 CPU
4) 依次在4槽和5槽插入電源模板 PM-E DC24 和步進(jìn)模塊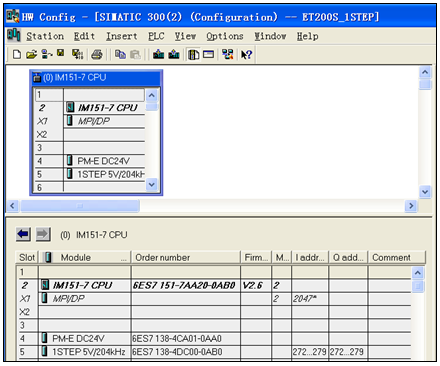
圖. 5: 硬件配置
4.2 模板參數(shù)配置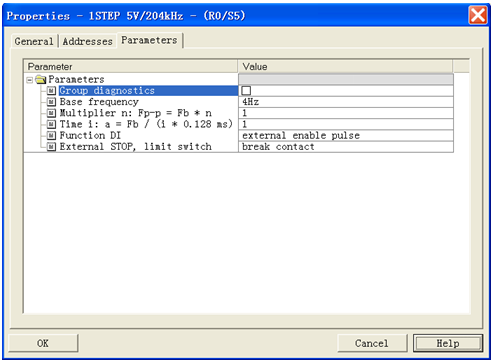
圖. 6: 步進(jìn)模塊參數(shù)接口
4.2.1 模板參數(shù)說(shuō)明
1) 組診斷:組診斷
2) 基準(zhǔn)頻率:基準(zhǔn)頻率,,以Hz為單位,,標(biāo)識(shí)Fb
3) 增益 n: 增益系數(shù) n,值范圍 1-255. 此增益系數(shù)決定啟動(dòng)/停止頻率 Fss,,并且計(jì)算公式為: Fss=Fb×n
4) 時(shí)間 i: 時(shí)間系數(shù) i, 值范圍 1-255. 該時(shí)間系數(shù)以Hz/ms決定加速和減速,,計(jì)算公式為: a = Fb ×R / (i×0.128 ms)
5)功能 DI: 數(shù)字量輸入DI 功能可選,可以被組態(tài)為外部脈沖輸入或者外部停止信號(hào),,缺省是外部脈沖且已使能,。
6) 外部 Stop, 限位 Stop: 外部 stop, 信號(hào)類(lèi)型停止開(kāi)關(guān). 接觸器觸點(diǎn)是常閉信號(hào),,以確保該接觸器信號(hào),缺省是讀取常閉信號(hào),。
4.2.2 本文所例參數(shù)設(shè)置如下
本例參數(shù)配置見(jiàn)圖. 6.
1) 沒(méi)有激活組診斷
2) 基準(zhǔn)頻率 4Hz
3) 乘法系數(shù) 1, 啟動(dòng)/停止頻率 4Hz
4) 時(shí)間系數(shù) 1, 加速/ 減速 31.25 Hz/ms
5) 使能外部輸入脈沖
6) 外部輸入停止和限位信號(hào)為常閉類(lèi)型
5. 編程
5.1 模板輸入/輸出地址分配
與其它ET200S功能塊類(lèi)似,,1STEP步進(jìn)模板也通過(guò)直接讀寫(xiě)I/O地址來(lái)對(duì)模板進(jìn)行控制和訪(fǎng)問(wèn)的。
反饋信號(hào) (輸入), 占用 8 字節(jié). 如表 2 輸入地址分配所示,。
控制信號(hào) (輸出), 占用 8 字節(jié). 如表 3 輸出地址分配所示,。
 化工儀器網(wǎng)
化工儀器網(wǎng)