 化工儀器網(wǎng)
化工儀器網(wǎng)










詳細(xì)介紹
西門子6RA7093-4LS22-0 西門子6RA7093-4LS22-0
6RA7093-4LS22-0
SIMOREG DC Master 整流器 帶微處理器 針對單象限驅(qū)動 電路 B6C 輸入 830V 3AC,1244A 可控勵磁整流器 D1000/1500 MRE-GEEF4S22 輸出 1000V DC,,1500A 輸出端 US 等級:1000V DC,, 1100A 現(xiàn)場輸入端 460V,輸出端 375V,, 40A
.控制系統(tǒng)原理和接線圖
下圖是本例中所使用的原理和接線圖,。

圖1:控制系統(tǒng)原理和接線圖
2.硬件需求
S7-1200 PLC目前有3種類型的CPU:
1)S7-1211C CPU。
2)S7-1212C CPU,。
3)S7-1214C CPU,。
這三種類型的CPU都可以使用USS通信協(xié)議通過通信模塊CM1241 RS485來實現(xiàn)S7-1200與G120變頻器的通信。
本例中使用的PLC硬件為:
1)PM1207電源 ( 6EP1 332-1SH71 )
2) S7-1214C ( 6ES7 214 -1BE30 -0XB0 )
3) CM1241 RS485 ( 6ES7 241 -1CH30 -0XB0 )
4) 模擬器 ( 6ES7 274 -1XH30 -0XA0 )
本例中使用的G120變頻器硬件為:
1) SINAMICS G120 PM240 (6SL3244-0BA20-1BA0)
2) SINAMICS G120 CU240S(6SL3224-0BE13-7UA0)
3) SIEMENS MOTOR (1LA7060-4AB10)
4) 操作面板 ( XAU221-001469)
5) USS 通信電纜 ( 6XV1830-0EH10)
3.軟件需求
1) 編程軟件 Step7 Basic V10.5 ( 6ES7 822-0AA0-0YA0)
4.組態(tài)
我們通過下述的實際操作來介紹如何在Step7 Basic V10.5 中組態(tài)S7-1214C 和G120變頻器的USS通信,。
4. 1 PLC 硬件組態(tài)
首先在Step7 Basic V10.5中建立一個項目,,如圖1所示。

圖2: 新建S7 1200項目
在硬件配置中,,添加CPU1214C和通信模塊CM1241 RS485模塊,,如圖2所示,。

圖3: S7 1200硬件配置
在CPU的屬性中,設(shè)置以太網(wǎng)的IP地址,,建立PG與PLC的連接,,如下圖所示。

圖4: S7 1200 IP地址的設(shè)置
4. 2 G120參數(shù)設(shè)置
變頻器的參數(shù)設(shè)置如下表所示,。
| 序號 | 功能 | 參數(shù) | 設(shè)定值 |
| 1 | 工廠設(shè)置復(fù)位 | P0010 | 30 |
| 2 | 工廠設(shè)置復(fù)位 | P970 | 1 |
| 3 | 快速啟動設(shè)置 | P0010 | 1 |
| 4 | 電機(jī)額定電壓 | P0304 | 380V |
| 5 | 電機(jī)額定功率 | P0307 | 5.5KW |
| 6 | 電機(jī)額定頻率 | P0310 | 50Hz |
| 7 | 電機(jī)額定轉(zhuǎn)速 | P0311 | 1350r/min |
| 8 | USS命令源 | P0700 | 5 |
| 9 | 頻率設(shè)定源 | P01000 | 5 |
| 10 | 小電機(jī)頻率 | P1080 | 0.0Hz |
| 11 | 大電機(jī)頻率 | P1081 | 50.0Hz |
| 12 | 啟動斜坡時間 | P1120 | 10.0S |
| 13 | 延遲斜坡時間 | P1121 | 10.0S |
| 14 | 結(jié)束快速啟動設(shè)置 | P3900 | 1 |
| 15 | 激活專家模式 | P0003 | 3 |
| 16 | 參考頻率 | P2000 | 50.0Hz |
| 17 | USS數(shù)據(jù)傳輸速度 | P2010 | 9 |
| 18 | USS從站地址 | P2011 | 1 |
| 19 | USS PZD長度 | P2012 | 2 |
| 20 | USS PKW長度 | P2013 | 4 |
| 21 | 通信監(jiān)控 | P2014 | 0 |
| 22 | 在E2PROM 保存數(shù)據(jù) | P0971 | 1 |
| 23 | 激活專家模式 | P0003 | 3 |
| 24 | 激活參數(shù)模式 | P0010 | 30 |
| 25 | 從G120中傳輸參數(shù)到BOP | P0802 | 1 |
表1 :G120變頻器的參數(shù)設(shè)置
注意:表1中的17,,18,19,,20 這四項參數(shù)值的設(shè)置必須使PLC的參數(shù)值與變頻器的參數(shù)值相*,。而19,20這兩個參數(shù)值必須設(shè)置成如表1中的值,,否則有可能變頻器與S7-1200通信有如下問題:可能不能讀出從變頻器反饋回來的參數(shù)值,。
5.USS通信原理與編程的實現(xiàn)
5. 1 S7 1200 PLC與G120 通過USS通信的基本原理
S7 1200提供了的USS庫進(jìn)行USS通信,如下圖所示:

圖5: S7 1200 的USS庫
USS_DRV 功能塊是S7-1200 USS通信的主體功能塊,,接受變頻器的信息和控制變頻器的指令都是通過這個功能快來完成的,。必須在主 OB中調(diào)用,不能在循環(huán)中斷OB中調(diào)用,。
USS_PORT功能塊是S7-1200與變頻器USS通信的接口,主要設(shè)置通信的接口參數(shù)??稍谥鱋B或中斷OB中調(diào)用,。
USS_RPM功能塊是通過USS通信讀取變頻器的參數(shù)。必須在主 OB中調(diào)用,,不能在循環(huán)中斷OB中調(diào)用,。
USS_WPM功能塊是通過USS通信設(shè)置變頻器的參數(shù)。必須在主 OB中調(diào)用,,不能在循環(huán)中斷OB中調(diào)用,。
這些功能塊與變頻器之間的控制關(guān)系如下圖所示:

圖6: USS 通信功能塊與變頻器的控制關(guān)系
USS_DRV功能塊通過USS_DRV_DB數(shù)據(jù)塊實現(xiàn)與USS_PORT功能塊的數(shù)據(jù)接收與傳送,而USS_PORT功能塊是S7-1200 PLC CM1241 RS485模塊與變頻器之間的通信接口,。USS_RPM功能塊和USS_WPM功能塊與變頻器的通信與USS_DRV功能塊的通信方式是相同的,。
每個S7-1200 CPU多可帶3個通信模塊,而每個CM1241 RS485通信模塊多支持16個變頻器,。因此用戶在一個S7-1200 CPU中多可建立3個USS網(wǎng)絡(luò),,而每個USS網(wǎng)絡(luò)多支持16個變頻器,總共多支持48個USS變頻器,。
5. 2 S7 1200 PLC進(jìn)行USS通信的編程
1.USS通信接口參數(shù)功能塊的編程
USS通信接口參數(shù)功能塊的編程如下圖所示,。

圖7: USS通信接口參數(shù)功能塊的編程
USS_PORT功能塊用來處理USS網(wǎng)絡(luò)上的通信,它是S71200 CPU與變頻器的通信借口,。每個CM1241 RS485模塊有且必須有一個USS_PORT功能塊,。
PORT:指的是通過哪個通信模塊進(jìn)行USS通信,。
BAUD:指的是和變頻器進(jìn)行通行的速率。 變頻器的參數(shù)P2010種進(jìn)行設(shè)置,。
USS_DB:指的是和變頻器通信時的USS數(shù)據(jù)塊,。每個通信模塊多可以有16個USS數(shù)據(jù)塊,每個CPU多可以有48個USS數(shù)據(jù)塊,,具體的通信情況要和現(xiàn)場實際情況相聯(lián)系,。每個變頻器與S7-1200進(jìn)行通信的數(shù)據(jù)塊是一的。
ERROR:輸出錯誤,。
STATUS:掃描或初始化的狀態(tài),。
S7-1200 PLC與變頻器的通信是與它本身的掃描周期不同步的,在完成一次與變頻器的通信事件之前,,S7-1200通常完成了多個掃描,。
USS_PORT通信的時間間隔是S7-1200與變頻器通信所需要的時間,不同的通信波特率對應(yīng)的不同的USS_PORT通信間隔時間,。下圖列出了不同的波特率對應(yīng)的USS_PORT小通信間隔時間,。

圖8:不同的波特率對應(yīng)的USS_PORT小通信間隔時間
USS_PORT在發(fā)生通信錯誤時,通常進(jìn)行3次嘗試來完成通信事件,,那么S7-1200與變頻器通信的時間就是USS_PORT發(fā)生通信超時的時間間隔,。例如:如果通信波特率是57600,那么USS_PORT與變頻器通信的時間間隔應(yīng)當(dāng)大于小的調(diào)用時間間隔,,即大于36.1Ms而小于109Ms,。S7-1200 USS 協(xié)議庫默認(rèn)的通信錯誤超時嘗試次數(shù)是2次。
基于以上的USS_PORT通信時間的處理,,我們建議在循環(huán)中斷OB塊中調(diào)用USS_PORT通信功能塊,。在建立循環(huán)中斷OB塊時,我們可以設(shè)置循環(huán)中斷OB塊的掃描時間,,以滿足通信的要求,。循環(huán)中斷OB塊的掃描時間的設(shè)置如下圖所示:

圖9:循環(huán)中斷OB塊的掃描時間的設(shè)置
Task
本例為如何調(diào)試兩臺變頻器主從控制。
一個簡單的示例如傳送帶上有兩臺變頻器:一臺為主傳動,,一臺為從傳動控制,。
傳送帶的速度通過主傳動設(shè)定 (電機(jī) M1) (如:通過 AIN 1)。主傳動選用帶編碼器的矢量控制,,從傳動為帶編碼器的閉環(huán)轉(zhuǎn)矩控制,。 從傳動轉(zhuǎn)矩設(shè)定值來自于主傳動轉(zhuǎn)矩,需要將主傳動模擬量輸出連接到從傳動的模擬量輸入,。
基本*條件
MICROMASTER 440變頻器與配置 CU240S(版本3.2以上)的 SINAMICS G120均可,。
解決方案
按說明書調(diào)試兩臺變頻器如下:
1. 兩臺變頻分別做快速調(diào)試
2. 兩臺變頻分別做電機(jī)識別
3. 兩臺變頻器分別做帶編碼器的調(diào)試
4. 主傳動模擬量輸出端2連接到從傳動模擬量輸入端2
5. 設(shè)定從傳動I/O端子板的模擬量輸入端子2的撥碼開關(guān)為ON(0-20mA輸入)
調(diào)試之前首先要校對電機(jī)速度,方法是采用V/F(見P1300)控制方式,兩臺變頻器運(yùn)行速度要相同,,比較參數(shù)r0061和r0021值的大小,,電機(jī)的轉(zhuǎn)向和大小必須*(微小的偏差是可以接受的)。如果完成了以上要求,, 則改變P1300的值來激活帶編碼器閉環(huán)矢量控制/閉環(huán)轉(zhuǎn)矩控制(參考 MM440參數(shù)手冊, 3.29節(jié)控制模式,,參數(shù) P1300;3.5節(jié)速度編碼器,,參數(shù)P0400,;MM440操作說明,3.23.2節(jié)),。如果電機(jī)旋轉(zhuǎn)方向不正確,,應(yīng)該檢查變頻器的輸出相序和編碼器通道,必要時進(jìn)行改線,。
注意
參數(shù)P1820設(shè)置為1就可以改變電機(jī)轉(zhuǎn)向而不需要重新接電機(jī)動力電纜,,同時參數(shù)P0410設(shè)置為1可以改變編碼器轉(zhuǎn)向檢測(只對SINAMICS G120;參考CU240S參數(shù)手冊…參數(shù) P0410),。
主傳動的參數(shù)設(shè)置
1. P0771.1 = r0079 模擬量輸出2為轉(zhuǎn)矩設(shè)定值
為了能將從主機(jī)來的負(fù)轉(zhuǎn)矩設(shè)定值給定到從機(jī)(電機(jī)的正轉(zhuǎn)與反轉(zhuǎn)),,主機(jī)模擬量輸出需標(biāo)定如下:
2. P0777.1 = 0 % x1 值 = 0 %
3. P0778.1 = 10 y1 值 = 10 mA
4. P0779.1 = 100 % x2 值 = 100 %
5. P0780.1 = 20 y2 值 = 20 mA
6. P1300 = 21 帶編碼器矢量控制
從傳動參數(shù)需設(shè)置如下
7. P0756.1 = 2 模擬輸入2 0-20mA
模擬輸入的標(biāo)定:
8. P0757.1 = 10 x1 值 = 10 mA
9. P0758.1 = 0 % y1 值 = 0 %
10. P0759.1 = 20 x2 值 = 20 mA
11. P0760.1 = 100 % y2 值 = 100 %
12. P1082 = 55 大頻率 (比主傳動值高)
13. P1300 = 23 帶編碼器轉(zhuǎn)矩控制
14. P1503 = r0755.1 模擬輸入2作為轉(zhuǎn)矩設(shè)定
15. P2000 = 55 基準(zhǔn)頻率 (比主傳動值高)
如果從機(jī)故障停機(jī),必須盡可能快得關(guān)斷主傳動,。需要將從傳動的故障位 r0052.3輸出作為主機(jī)的OFF2命令或脈沖使能,,從機(jī)數(shù)字輸出 (e.g. DOUT1) 應(yīng)連接到主機(jī)的數(shù)字輸入 (如: DIN4).
將從機(jī)的端子19與20連接到主機(jī)端子8與9上。
相應(yīng)的參數(shù)需要設(shè)置:
從傳動
P0731.0 = 52.3
主傳動
P0704 = 99
P0844.0 = 722.3 OFF2 命令
Or/and
P0852.0 = 722.3 脈沖使能
系統(tǒng)的原理框圖
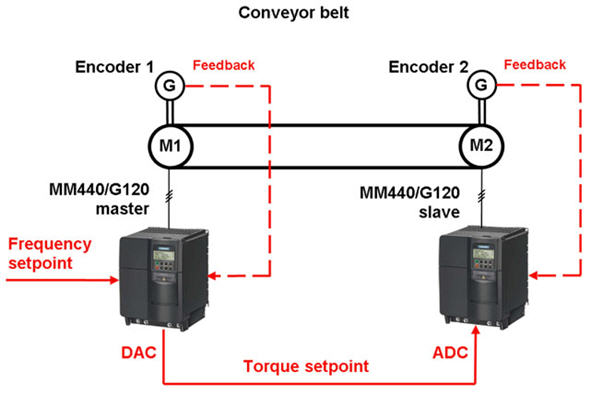
Fig. 01
西門子電源6EP1334-3BA00
西門子電源6EP1333-2AA00
西門子電抗器6SN1111-0AA00-0BA1
西門子電源6EP1436-1SL11
西門子電源6EP1436-1SH01
西門子電源6EP1334-3BA00
西門子電源6EP1436-2BA00
西門子電源模塊6EW1861-2AF
西門子電源6EP1436-3BA00
西門子電源模塊6SL3130-7TE21-6AA3
西門子電源模塊6SL3130-7TE25-5AA3
西門子電源模塊6SL3130-7TE28-0AA3
西門子電源模塊6SL3130-7TE23-6AA3
西門子電源模塊6SL3130-7TE31-2AA3
西門子電源模塊6SN1145-1AA01-0AA0
西門子電源模塊6SN1145-1AA01-0AA1
西門子電子手輪6FC9320-5DC00
西門子電源模塊6SN1145-1BA02-0CA0
西門子電源模塊6SN1145-1BA02-0CA1
西門子定位模塊6ES7354-1AH01-0AE0
西門子電子手輪6FC9320-5DC01
西門子電阻模塊6SN1113-1AB01-0BA1
西門子動力電纜
西門子功率模塊6SN1123-1AA00-0JA1
西門子光幕3RG7841-3DD01
西門子功率模塊6SN1123-1AA00-0CA1
西門子功率模塊6SN1123-1AA00-0EA0
西門子功率模塊6SN1123-1AA00-0LA0
西門子功率模塊6SN1123-1AA00-0LA1
西門子機(jī)床控制面板
西門子監(jiān)控模塊6SN1112-1AC01-0AA1
西門子光幕處理單元3RG7847-4BD
西門子交流伺服系統(tǒng)6SC6
西門子控制單元6SN1118-0NH11-0AA1
西門子控制系統(tǒng)
西門子機(jī)床控制面板6FC3178-3EF20
西門子冷卻部件6SN1162-0BA02-0AA2
西門子濾波模塊6SL3000-0HE15-0AA0
西門子濾波器6SL3000-0BE21-6AA0
西門子冷卻部件6SN1162-0BA03-0AA1
西門子驅(qū)動端子6FX2003-0DA00
西門子驅(qū)動611A
西門子模塊6FX1151-1BB01
西門子驅(qū)動模塊6FC5548-0AC21-0AA0
西門子驅(qū)動611D
西門子驅(qū)動模塊6SN1111-0AB00-0AA0
西門子驅(qū)動模塊6FC5548-0AC22-0AA0
西門子驅(qū)動模塊6SN1115-0AA12-0AA0
西門子驅(qū)動模塊6SN1115-0BA11-0AA1
西門子驅(qū)動模塊6SN1118-0AD11-0AA1
西門子驅(qū)動模塊6SN1118-0DG21-0AA1
西門子驅(qū)動模塊6SN1118-0AE11-0AA1
西門子驅(qū)動模塊6SN1118-0DH21-0AA1
西門子驅(qū)動模塊6SN1118-0DG22-0AA0
西門子驅(qū)動模塊6SN1118-0DG23-0AA0
西門子驅(qū)動模塊6SN1118-0DJ21-0AA2
西門子驅(qū)動模塊6SN1118-0DH22-0AA1
西門子驅(qū)動模塊6SN1118-0DJ23-0AA1
西門子驅(qū)動模塊6SN1118-0DJ23-0AA2
西門子驅(qū)動模塊6SN1118-0DH23-0AA1
西門子驅(qū)動模塊6SN1118-0DK21-0AA1
西門子驅(qū)動模塊6SN1118-0DK23-0AA2
西門子驅(qū)動模塊6SN1118-0DJ21-0AA1
西門子驅(qū)動模塊6SN1118-0DK23-0AA1
西門子驅(qū)動模塊6SN1118-0DM13-0AA0
 化工儀器網(wǎng)
化工儀器網(wǎng)