 化工儀器網(wǎng)
化工儀器網(wǎng)










詳細(xì)介紹
西門子CPU總代理商 西門子CPU總代理商
上海盟疆有限公司是一家專業(yè)從事西門子工業(yè)自動化產(chǎn)品和數(shù)控系統(tǒng)銷售,、技術(shù)服務(wù)及培訓(xùn)的工程服務(wù)公司,。西門子代理商,西門子中國代理商,,西門子授權(quán)代理商,,西門子一級代理商,西門子PLC模塊代理商,,西門子變頻器代理商,,西門子電機(jī)代理商,西門子電線電纜代理商,。在西門子工業(yè)自動化產(chǎn)品領(lǐng)域,,公司憑借雄厚的技術(shù)實力及多年從事 SIEMENS 產(chǎn)品的銷售經(jīng)驗,本著樹立公司形象和對用戶認(rèn)真負(fù)責(zé)的精神開展業(yè)務(wù),,贏得了 SIEMENS 公司與廣大用戶的好評及大力支持,,我公司除了在西門子S7-200/300/400PLC、變頻傳動,、直流調(diào)速裝置,、網(wǎng)絡(luò)通訊及WinCC人機(jī)界面顯示系統(tǒng)等的產(chǎn)品銷售中擁有較好的價格優(yōu)勢外,,同時我們致力于工業(yè)自動化控制領(lǐng)域的產(chǎn)品開發(fā)、工程配套和系統(tǒng)集成,,擁有豐富的自動化產(chǎn)品的應(yīng)用和實踐經(jīng)驗以及雄厚的技術(shù)力量,,公司擁有一批充滿創(chuàng)新活力并具有豐富工作經(jīng)驗的員工,致力于為您提供優(yōu)質(zhì)的產(chǎn)品和服務(wù),。
西門子PLC總代理,,西門子中國授權(quán)代理商,上海西門子總代理,,西門子上海代理商,,電機(jī)總代理,上海西門子PLC總代理,,上海西門子一級代理,,上海西門子變頻器總代理,上海西門子銷售商,,中國總代理西門子電機(jī),,西門子中國總代理 中國一級代理 西門子中國總代理 ,西門子S7-300PLC,西門子s7-200plc ,,S7-200PLC總代理,,PLC中國總代理,西門子PLC,,西門子PLC總代理,,,西門子中國總代理,,上海西門子PLC總代理,,S7-200PLC總代理,S7-300西門子PLC,,plc模塊,西門子plc編程線,,plc編程電纜
我公司經(jīng)營西門子*現(xiàn)貨PLC;S7-200S7-300 S7-400 S7-1200 觸摸屏,,變頻器,,6FC,6SNS120 V10 V60 V80伺服數(shù)控備件:*電機(jī)(1LA7,、1LG4,、1LA9、1LE1),,國產(chǎn)電機(jī)(1LG0,,1LE0)大型電機(jī)(1LA8,1LA4,,1PQ8)伺服電機(jī)(1PH,,1PM,,1FT,1FK,,1FS)西門子保內(nèi)*產(chǎn)品‘質(zhì)保一年,。一年內(nèi)因產(chǎn)品質(zhì)量問題免費更換新產(chǎn)品,;不收取任何費,。咨詢。
追求,,追求精確
要通過“嚴(yán)格”的檢驗程序,,以可編程控制器(PLC)產(chǎn)品為例,在整個生產(chǎn)過程中針對該類產(chǎn)品的質(zhì)量檢測節(jié)點就超過20個,。視覺檢測是數(shù)字化工廠*的質(zhì)量檢測方法,,相機(jī)會拍下產(chǎn)品的圖像與Teamcenter數(shù)據(jù)平臺中的正確圖像作比對,一點小小的瑕疵都逃不過SIMATIC IT品質(zhì)管理模塊的“眼睛”,。對比傳統(tǒng)制造企業(yè)的人工抽檢,,這顯然要可靠又快速得多。”
西門子S7-200產(chǎn)品信息

本機(jī)集成8輸入/6輸出共14個數(shù)字量I/O點,??蛇B接2個擴(kuò)展模塊。6K字節(jié)程序和數(shù)據(jù)存儲空間,。4個獨立的30kHz高速計數(shù)器,,2路獨立的20kHz高速脈沖輸出。1個RS485通訊/編程口,,具有PPI通訊協(xié)議,、MPI通訊協(xié)議和自由方式通訊能力。非常適合于小點數(shù)控制的微型控制器,。

本機(jī)集成14輸入/10輸出共24個數(shù)字量I/O點,。可連接7個擴(kuò)展模塊,,擴(kuò)展至168路數(shù)字量I/O點或35路模擬量I/O 點,。13K字節(jié)程序和數(shù)據(jù)存儲空間。6個獨立的30kHz高速計數(shù)器,,2路獨立的20kHz高速脈沖輸出,,具有PID控制器。1個RS485通訊/編程口,,具有PPI通訊協(xié)議,、MPI通訊協(xié)議和自由方式通訊能力。I/O端子排可很容易地整體拆卸,。是具有較強(qiáng)控制能力的控制器,。

本機(jī)集成14輸入/10輸出共24個數(shù)字量I/O點,,2輸入/1輸出共3個模擬量I/O點,可連接7個擴(kuò)展模塊,,擴(kuò)展值至168路數(shù)字量I/O點或38路模擬量I/O點,。20K字節(jié)程序和數(shù)據(jù)存儲空間,6個獨立的高速計數(shù)器(100KHz),,2個100KHz的高速脈沖輸出,,2個RS485通訊/編程口,具有PPI通訊協(xié)議,、MPI通訊協(xié)議和自由方式通訊能力,。本機(jī)還新增多種功能,如內(nèi)置模擬量I/O,位控特性,,自整定PID功能,,線性斜坡脈沖指令,診斷LED,,數(shù)據(jù)記錄及配方功能等,。是具有模擬量I/O和強(qiáng)大控制能力的新型CPU。

本機(jī)集成24輸入/16輸出共40個數(shù)字量I/O 點,??蛇B接7個擴(kuò)展模塊,擴(kuò)展至248路數(shù)字量I/O 點或35路模擬量I/O 點,。13K字節(jié)程序和數(shù)據(jù)存儲空間,。6個獨立的30kHz高速計數(shù)器,2路獨立的20kHz高速脈沖輸出,,具有PID控制器,。2個RS485通訊/編程口,具有PPI通訊協(xié)議,、MPI通訊協(xié)議和自由方式通訊能力,。I/O端子排可很容易地整體拆卸。用于較高要求的控制系統(tǒng),,具有更多的輸入/輸出點,,更強(qiáng)的模塊擴(kuò)展能力,更快的運行速度和功能更強(qiáng)的內(nèi)部集成特殊功能,???適應(yīng)于一些復(fù)雜的中小型控制系統(tǒng)。
在電網(wǎng)-變頻器-電機(jī)-負(fù)載構(gòu)成的驅(qū)動系統(tǒng)中,,能量的傳遞是雙向的,。電動機(jī)工作模式時,電能從電網(wǎng)經(jīng)由變頻器傳遞到電機(jī),,轉(zhuǎn)換為機(jī)械能帶動負(fù)載,,負(fù)載因此具有動能或勢能,;當(dāng)負(fù)載釋放這些能量以求改變運動狀態(tài)時,電機(jī)被負(fù)載所帶動,,進(jìn)入發(fā)電機(jī)工作模式,,向前級反饋已轉(zhuǎn)換為電形式的能量,這些能量被稱為再生制動能量,,可以通過變頻器返回電網(wǎng),,或者消耗在變頻器系統(tǒng)的制動電阻中。如圖1-1所示,。
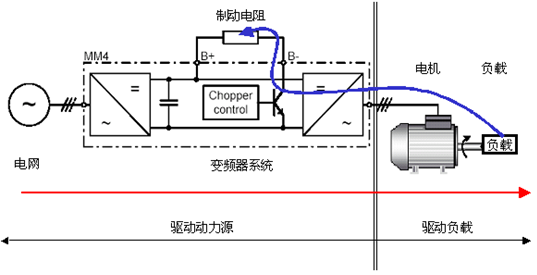
圖1-1 驅(qū)動系統(tǒng)的能量流向
較大制動能量的產(chǎn)生經(jīng)常出現(xiàn)在下面幾種場合里:
? 起重設(shè)備的重物下放過程
? 大慣量負(fù)載設(shè)備的快速減速過程
? 游梁式抽油機(jī)的驢頭下放過程等等,。
西門子變頻器MM440由三部分構(gòu)成,,整流部分,,直流回路部分,逆變部分,。當(dāng)MM440作為驅(qū)動轉(zhuǎn)換源而處在上述的制動過程時,,制動能量將通過其逆變部分返回到直流回路,由于整流部分由不可控的二極管組成,,制動能量無法回到電網(wǎng),,造成直流回路電壓泵升,進(jìn)而導(dǎo)致MM440因直流回路電壓過高(F0002)而停機(jī),。為避免上述情形的發(fā)生,,MM440 提供了動態(tài)制動功能,即在直流回路上安裝一個制動單元,,再配以適當(dāng)?shù)闹苿与娮?,將制動能量在該電阻上以熱能的形式消散。A-F尺寸的MM440已將制動單元集成在變頻器內(nèi)部,,只需選配制動電阻,,安裝在MM440端子B+ B- 上,然后調(diào)整相應(yīng)的參數(shù)即可,,而功率相對較大的FX,、GX尺寸MM440內(nèi)部沒有集成制動單元,需要從SIMOVERT MASTERDRIVES的產(chǎn)品目錄里選配相應(yīng)的制動單元以及制動電阻,。
本章將介紹制動能量的簡單計算以及MM440制動單元的基本工作原理,,幫助您實現(xiàn)西門子MM440變頻器制動電阻的正確選型。
二 制動能量的簡單計算
? 制動能量的產(chǎn)生
根據(jù)電機(jī)理論, 定子中通入同步頻率 ?1的交流電流, 在氣隙中產(chǎn)生順時針旋轉(zhuǎn)磁場作用在轉(zhuǎn)子上,,相當(dāng)于轉(zhuǎn)子繞組逆時針運動切割旋轉(zhuǎn)磁場,,轉(zhuǎn)子回路因而感應(yīng)出電流產(chǎn)生旋轉(zhuǎn)力矩M,方向如圖2-1中a所示,。經(jīng)過負(fù)載的平衡,,轉(zhuǎn)子以 (1-s) ?1的速度穩(wěn)定旋轉(zhuǎn),,轉(zhuǎn)子繞組仍然逆時針以s?1的速度切割旋轉(zhuǎn)磁場。電機(jī)工作在電動機(jī)模式下, P = M?Ω>0, 即運行在*象限,。
在需要變頻器快速制動負(fù)載的情況下,,變頻器通入電機(jī)定子中的電流頻率突降為?1′ (?1′ <?1), 由于驅(qū)動負(fù)載存在慣性,轉(zhuǎn)子的轉(zhuǎn)速不能突降,,而是仍然維持在原轉(zhuǎn)速上,,導(dǎo)致轉(zhuǎn)子繞組切割旋轉(zhuǎn)磁場的方向改變,轉(zhuǎn)子電流方向以及電磁力矩方向也因此發(fā)生改變,,如圖2-1中b所示,,電機(jī)工作在發(fā)電機(jī)模式下, 開始運行在第二象限,P=(-M)?Ω<0, 再生制動能量產(chǎn)生,。 如果電機(jī)被負(fù)載拖動,,轉(zhuǎn)子轉(zhuǎn)速超過變頻器輸入的同步轉(zhuǎn)速,同樣會有上述的現(xiàn)象發(fā)生,。

a) 正向運行時 b) 轉(zhuǎn)子轉(zhuǎn)速大于同步轉(zhuǎn)速時
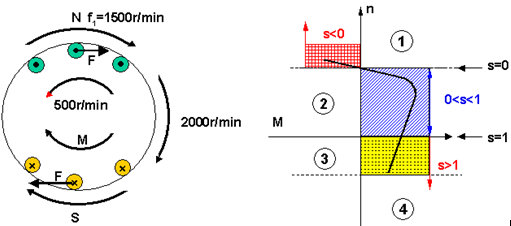
c) 轉(zhuǎn)子旋轉(zhuǎn)方向改變時 d) 電機(jī)四象限圖
圖2-1 制動能量產(chǎn)生時的電機(jī)狀態(tài)
在驅(qū)動系統(tǒng)下放重物的過程中,,轉(zhuǎn)子繞組仍然保持逆時針運動切割旋轉(zhuǎn)磁場,轉(zhuǎn)子電流以及旋轉(zhuǎn)力矩方向不變,,但是由于切割速度過快,,轉(zhuǎn)子電流產(chǎn)生的祛磁磁場將能量返回了定子側(cè),電機(jī)工作在發(fā)電機(jī)模式下, 開始運行在第四象限,,如圖2-1中 c 所示,,P=M?(-Ω)<0, 再生制動能量產(chǎn)生。
? 制動能量的簡單計算
例1 某客戶將MM440 應(yīng)用在升降驅(qū)動設(shè)備上,,并要求在6.25秒內(nèi)以0.4m/s的速度下 放500kg的重物,每30s重復(fù)一次該過程,,應(yīng)當(dāng)如何計算制動功率?
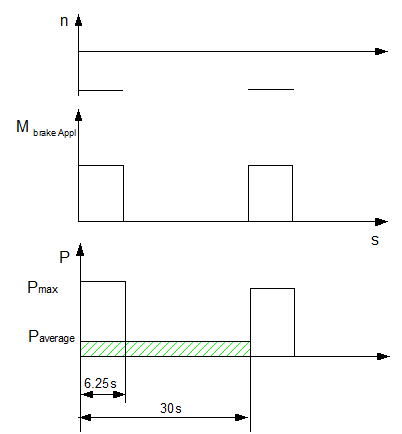
重物的勢能為: A= m x g x h =500kg x 9.81 x (0.4m/s x 6.25s)=12263J
大 功率為: P brake Appl max = A/s = 12263J/6.25s = 1962W
平均 功率為: P brake Appl average = 1962W x 6.25s / 30s= 392.4W
例2 某驅(qū)動負(fù)載需要從2900RPM的速度降至為0,,其驅(qū)動數(shù)據(jù)見表1,,如何計算反饋回變頻器直流側(cè)的制動能量?
電動機(jī)額定功率 Pmotor N=5.5 KW
電動機(jī)效率 ?motor =0.865
電動機(jī)額定轉(zhuǎn)速 N motor N= 2925 RPM
電動機(jī)轉(zhuǎn)動慣量 J motor =0.015kgm2
負(fù)載轉(zhuǎn)動慣量 J load =0.4 kgm2
電動機(jī)高運行轉(zhuǎn)速 nmax =2900RPM
制動時間 t brake appl =5s
負(fù)載工作周期 t cycle appl =15s
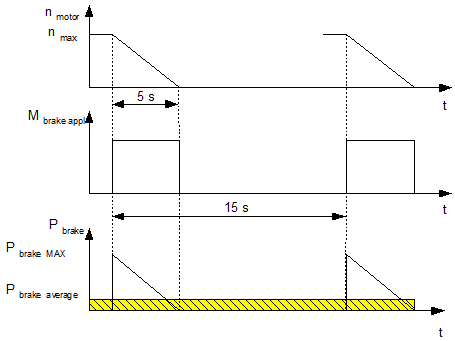
產(chǎn)生的制動轉(zhuǎn)矩:
一個周期內(nèi)產(chǎn)生的大制動功率:

一個周期內(nèi)的總制動能量:


一個周期內(nèi)的平均制動功率:

三 MM440 制動單元的基本工作原理
? 制動單元激活電壓與直流回路故障電壓
按照上述的計算方法得出的再生制動能量將反饋到變頻器的內(nèi)部,,造成直流回路上電壓泵升,。為了避免變頻器因直流回路過電壓F0002而跳閘,當(dāng)電壓上升到臨界點 UDC chopper 時,,制動單元就被激活,,并按照預(yù)先規(guī)定的負(fù)載工作周期將制動能量消耗在外接制動電阻上,拉動直流回路電壓下降,。如果制動能量過大,,未能在規(guī)定時間內(nèi)得到散逸,那么直流回路電壓將繼續(xù)上升,直到F0002跳閘,。如圖3-1所示,。
圖3-1直流回路電壓的上升過程
| 制動單元觸發(fā)臨界電壓 UDC chopper有兩種算法,采用哪一種,,則取決于MM440 參數(shù)P1254 | 若P1254=0 | 1.13 x  x P0210 x P0210 |
| 若P1254=1 | 0.98 x r1242 |
表3-1 激活動態(tài)制動功能的直流回路電壓值
? 制動單元動作過程
MM440變頻器制動單元的核心是一個門限電壓控制斬波器(IGBT transistor),,當(dāng)它導(dǎo)通時再生制動能量被外接制動電阻吸收,轉(zhuǎn)化成熱能得以釋放,。斬波器的工作頻率 f chopper為2KHz,,占控比 t chopper on 由變頻器內(nèi)部的監(jiān)控系統(tǒng)決定。如圖3-2所示,。
圖3-2 動態(tài)制動的操作方式
當(dāng)再生制動能量迫使直流回路電壓達(dá)到UDC chopper時,,制動單元自動投入運行,由監(jiān)控系統(tǒng)為斬波器選擇適當(dāng)?shù)恼伎乇?,制動能量被制動電阻吸收?/p>
? 如果制動能量少于在制動電阻上消耗的能量( P brake resistor=VDC2 / Rmin) ,,那么直流回路電壓會很快下降到UDC chopper之下,制動單元會在開通2ms之后自動關(guān)閉,,占控比的選擇在通路1上完成,。 若直流回路電壓再次達(dá)到UDC chopper,該過程將被重復(fù),。
? 如果制動能量多于此時在制動電阻上消耗的能量,那么盡管制動自動已經(jīng)投入運行,,直流回路電壓仍然會繼續(xù)上升,,由監(jiān)控系統(tǒng)選擇的占控比也快速線性增加,直到占控比為1(通道1),,斬波器持續(xù)開通,,制動電阻在此其間持續(xù)吸收制動能量。為了保護(hù)此時的制動電阻不會因吸收了過多能量而過熱損壞,,必須事先根據(jù)制動電阻的制動能力選擇適當(dāng)?shù)某掷m(xù)工作時限 t chopper on,。當(dāng)持續(xù)工作時限達(dá)到時,切換到通道2,,占控比自動被修正為P1237中設(shè)定的值以減少制動能量進(jìn)入制動電阻,,令其有充分的時間冷卻,此時直流回路電壓將有所回升,。其過程如圖3-3所示,。可見,,如果電阻值選擇的太小,,或者P1237 的值選擇不當(dāng),會造成制動能量因吸收不凈而導(dǎo)致的直流回路電壓繼續(xù)上升,而制動電阻會因過熱而損壞,。
MM440制動單元的斬波器為通道2規(guī)定了5種占控比,,即負(fù)載工作周期,由參數(shù)P1237 來選擇 ,。列表3-2如下,。
| P1237 | t chopper on (斬波器占控比為1的長時間) | P brake resistor average | |
| 0 | 0% | 動態(tài)制動未激活 | 0 |
| 1 | 5% | 12.0s | 0.05 P brake Appl max |
| 2 | 10% | 12.6s | 0.1 P brake Appl max |
| 3 | 20% | 14.2s | 0.2 P brake Appl max |
| 4 | 50% | 22.8s | 0.5 P brake Appl max |
| 5 | 100% | 在制動單元激活狀態(tài)下始終開通 | 1 P brake Appl max |
表3-2 MM440的負(fù)載工作周期
四 制動電阻的計算以及選型
? 西門子制動電阻的說明
西門子MICROMASTER 變頻器產(chǎn)品樣本DA51.2 中列出的制動電阻只是按照P1237=1即5%的工作負(fù)載周期來進(jìn)行設(shè)計的。例如: 訂貨號為6SE6400-4BC05-0AA0的制動電阻,,小阻值為180?,,可以承受大直流回路電壓為420V ,因此該制動電阻可在12秒內(nèi)連續(xù)開通,,吸收 Pbrake resistor max = U dc max 2 /R min =980W的大制動功率,。12秒后,僅能承擔(dān)5%的大制動功率,,即約50W 的連續(xù)導(dǎo)通功率,,直到240秒后制動電阻得到充分的冷卻,方可再次承擔(dān)12秒的大制動功率,。
? 制動電阻的選擇與校驗
為MM440變頻器配置制動電阻,,需要滿足二個條件:
1) 制動電阻大功率 P brake resistor max >= 大制動功率P brake Appl max
2) 負(fù)載工作周期內(nèi)的制動電阻連續(xù)功率 P brake resistor average >=
制動周期內(nèi)的平均制動功率 P brake Appl average
下面舉例說明如何選擇制動電阻, 請回顧第二節(jié)中的例2,為5.5KW ,、3~380-480V的MM440配置制動電阻,,按照樣本DA51.2初選6SE6400-4BD16-5CA0
一個制動周期內(nèi)產(chǎn)生的大制動功率: P brake Appl max = 6.6kW
制動電阻可以承受的大制動功率: P brake resistor max =12.6 kW
P brake Appl max < P brake resistor max *個條件滿足
一個制動周期內(nèi)的平均制動功率: P brake Appl average =1.1kW
負(fù)載工作周期內(nèi)的制動電阻連續(xù)功率: P brake resistor average = 0.65 kW
P brake Appl average > P brake resistor average第二個條件不滿足
表明該制動電阻沒有足夠的容量接受1.1kW的制動能量。在此,,可以提出兩個解決方案:
1)采用四個該型號電阻,,兩并兩串地接入,見圖3-4,??偟闹苿幼柚挡⑽锤淖儯蚨軌虺惺艿拇笾苿庸β?nbsp;P brake max = U dc max 2 /R min 也未改變,。 但是負(fù)載工作周期內(nèi)的制動電阻連續(xù)功率卻提高了4倍,,
P brake resistor average = 0.65kW × 4 = 2.6kW。此時P1237 必須放開限制,,設(shè)置為3,,即負(fù)載工作周期為20%。
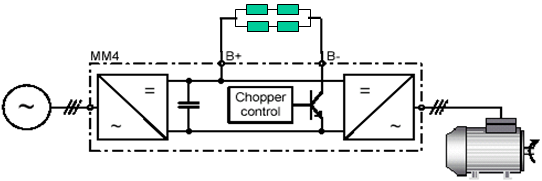
圖3-4 制動電阻的接入方法
3) 選擇其他型號大容量的制動電阻,,例如采用MASTERDRIVES 產(chǎn)品系列中訂貨號為6SE7018-0ES87-2DC0的制動電阻,,其阻值為80?, 因此能夠承受的大制動功率P brake max =U dc max 2 /R min =8.82kW,,
P brake Appl max < P brake resistor max *個條件滿足
因為MASTERDRIVES 產(chǎn)品系列的制動電阻均是按照20%的負(fù)載工作周期制定的,,因此需要將P1237設(shè)置3,P brake resistor average =8.82kW×0.2=1.764kW
P brake Appl average < P brake resistor average第二個條件滿足
? FX-GX 制動單元與制動電阻選擇
在MICROMASTER DRIVES系列中,僅在外形尺寸為A-F的MM440里集成了制動單元,,只需再選擇一個適當(dāng)?shù)耐饨又苿与娮杓纯?。外形尺寸為FX 、GX的MM440因為功率相對較大,,不再在內(nèi)部集成制動單元,,而是需要采用MASTERDRIVES系列中的外接制動單元以及制動電阻。其選擇方法參見MASTERDRIVES產(chǎn)品樣本,。
? MM440 中相關(guān)動態(tài)制動的必要參數(shù)設(shè)置
P1233=0 禁止直流制動
P1234=0 禁止復(fù)合制動
P1240=0 禁止直流電壓控制器功能
P1254=0或1 選擇 UDC chopper的計算方法
P1237>0 使能動態(tài)制動功能
 化工儀器網(wǎng)
化工儀器網(wǎng)