 化工儀器網(wǎng)
化工儀器網(wǎng)










詳細(xì)介紹
西門子MM430變頻器代理
西門子是較大的電氣化公司自1872年進(jìn)入中國(guó)以來(lái)的解決方案和產(chǎn)品堅(jiān)持不懈地對(duì)中國(guó)的發(fā)展提供全面支持,目前西門子在中國(guó)已經(jīng)有6家分公司如:蘇州電器,、南京電機(jī),、上海、武漢,、大連,、成都西門子在中國(guó)已擁有64個(gè)辦事處,2014年西門子在中國(guó)的銷售額就高達(dá)720億人民幣不包括(中國(guó)香港,,中國(guó)澳門,,中國(guó)臺(tái)灣)的銷售額。

歡迎您前來(lái)詢價(jià).100分的服務(wù).100分的質(zhì)量.100分的售后.100分的發(fā)貨速度
大量現(xiàn)貨 24小時(shí)在線服務(wù) 給您意想不到的折扣
1 系統(tǒng)要求
軟件要求:電腦安裝有以下軟件:STEP7 ,,Drive ES,,Drivemonitor。
硬件要求:變頻器或者直流調(diào)速器應(yīng)配有CBP2 通訊模板,,以支持PROFIBUS DP通訊,。
2 Masterdrives 6SE70 系列變頻器的配置和調(diào)試方法
2.1 STEP7配置
我們以一個(gè)簡(jiǎn)單的例程為例,本例中
PC側(cè)安裝的軟件為: STEP7 v5.4 sp5, Drive ES v5.5,,Drivemonitor V5.4 sp2;
變頻器為6SE7011-5EP60-Z Z=G91
PC機(jī)與變頻器之間采用PROFIBUS DP電纜連接通訊,。
1) 首先在STEP7中新建項(xiàng)目,如圖1

圖1
2) 在項(xiàng)目上插入新的驅(qū)動(dòng)系統(tǒng),,在Set PG/PC中設(shè)為Profibus通訊的方式:
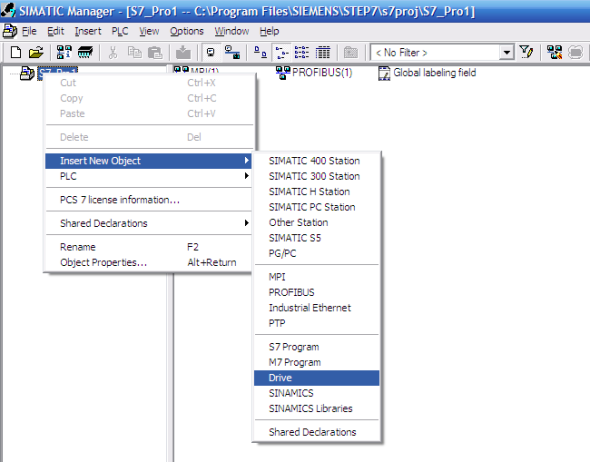
圖2
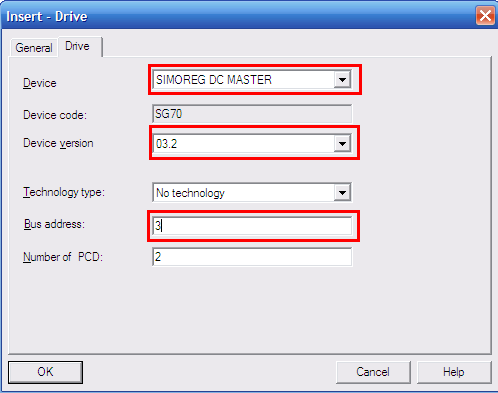
3) 然后,,在彈出的對(duì)話框中選擇對(duì)應(yīng)的選項(xiàng):在Device中選擇變頻器的類型,在Device Version中選擇變頻器的版本(可以參考變頻器的參數(shù)r0069),,在BusAddress中設(shè)置變頻器的DP地址,,如圖3
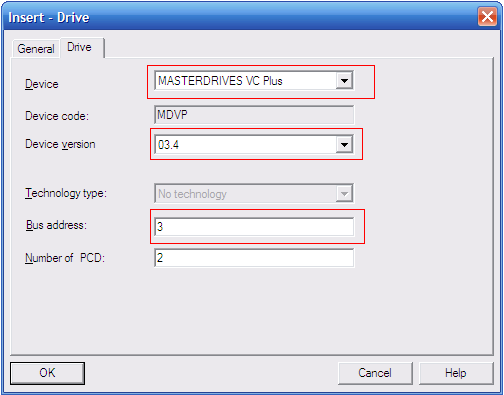
圖3
4) 點(diǎn)擊OK之后,新建驅(qū)動(dòng)裝置完成,,在新建的驅(qū)動(dòng)裝置上插入Parameter Set,,如圖4
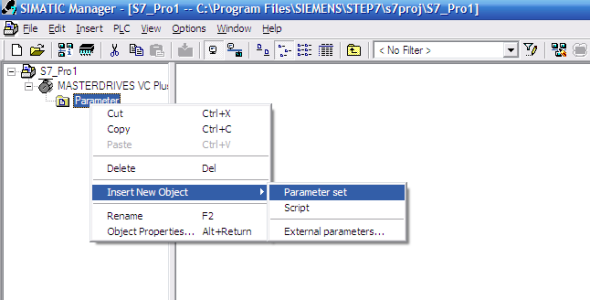
圖4
2.2變頻器調(diào)試
2.2.1 變頻器通訊參數(shù)(需要在面板PMU上操作)
需要設(shè)置變頻器通訊參數(shù):
P918=變頻器DP地址
P053=參數(shù)化接口的功能參數(shù)
2.2.2 在step7界面下使用Drivemonitor 調(diào)試變頻器
1) 連接變頻器:在STEP7中雙擊新建的Parameter Set,打開(kāi)Drivemonitor 軟件,,然后點(diǎn)擊工具欄按鈕“Online(Write E2PROM)”,,完成PC機(jī)與變頻器的連接。如圖5:

圖5
2)設(shè)置參數(shù):點(diǎn)擊工具欄按鈕“Parameter list complete”進(jìn)入?yún)?shù)列表,,按照參數(shù)設(shè)置步驟設(shè)置變頻器參數(shù)(參考6SE70 使用大全上冊(cè)中的參數(shù)設(shè)置步驟章節(jié)),。
3) Control Panel:是Drivemonitor中的控制界面,,可以用此功能實(shí)現(xiàn)簡(jiǎn)單的調(diào)試,如啟動(dòng)電機(jī),,給定轉(zhuǎn)速旋轉(zhuǎn),,優(yōu)化等等,也可以用功能實(shí)現(xiàn)故障判斷,。Drivemonitor界面的下面一行是Control Panel 功能條,,點(diǎn)擊右下角的箭頭(如圖6紅框中所示):

圖6
點(diǎn)擊箭頭,出現(xiàn)Control Panel 界面,,點(diǎn)擊紅框中標(biāo)識(shí)的“Request master control”,獲得控制權(quán)(如圖7):

圖7
如圖8,,是Control Panel的功能介紹:
1) Request master control/ Relinguish master control(使用/取消Control Panel的功能)
2) Out bits 1-6
3) 變頻器的啟動(dòng),,停止控制按鈕
4) 速度設(shè)定值
5) 變頻器狀態(tài)顯示
6)故障確認(rèn)功能,如果變頻器處于故障或者報(bào)警狀態(tài)Device Status會(huì)顯示“F”或者“W”,,故障時(shí),,可以用此按鈕確認(rèn)故障
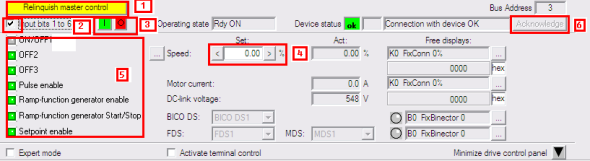
圖8
除此之外,Control Panel還有顯示電流電壓實(shí)際值,,顯示當(dāng)前參數(shù)組等功能,,以方便調(diào)試。
3. SIMOREG 6RA70直流調(diào)速器的配置
對(duì)于SIMOREG系列直流調(diào)速器,,配置方法如下:
3.1 STEP7配置:
1) 建立新的項(xiàng)目,,在項(xiàng)目名上右鍵插入驅(qū)動(dòng)系統(tǒng)(過(guò)程與Masterdrive系列變頻器的配置相同,請(qǐng)參考圖1和 圖2),,然后在對(duì)話框中選擇產(chǎn)品類型,,版本(r0060)以及PROFIBUS DP站地址 ,如圖9所示 :
 西門子MM430變頻器代理
西門子MM430變頻器代理
圖9
2 ) 添加新的Paranmeter Set,,雙擊打開(kāi)Drivemonitor的調(diào)試界面,。(過(guò)程與Masterdrive系列變頻器的配置相同,請(qǐng)參考圖4)
3.2 直流調(diào)速器調(diào)試
3.2.1 直流調(diào)速器側(cè)的配置
設(shè)置通訊參數(shù):(需要在面板PMU上操作)
P918=PROFIBUS DP站地址
P927=參數(shù)化接口的功能參數(shù)
3.2.2 使用Drivemonitor 調(diào)試
與Masterdrives系列變頻器相同,,首先點(diǎn)擊工具欄按鈕“Online(Write E2PROM)”(參考圖5) ,,完成PC機(jī)與變頻器的連接。然后按照6RA70的使用說(shuō)明書第7章調(diào)試步驟設(shè)定參數(shù),。
SIMOREG 6RA70系列直流調(diào)速器也可以使用Drivemonitor 的Control Panel功能做基本調(diào)試,,不同的是需要做如下設(shè)置:
直流調(diào)速器CUD1板上的端子37和參數(shù)P654的設(shè)定值相“與”,作為直流調(diào)速器的啟動(dòng)指令之一,,端子38與參數(shù)P661相與作為使能的指令,,因此在使用Control Panel功能時(shí),應(yīng)先將24V給到兩個(gè)端子中,,保證Control Panel的啟動(dòng)和使能指令有效,。
同時(shí)應(yīng)當(dāng)做如下參數(shù)設(shè)定:
P654=3100(通過(guò)DP通訊,,Drivemonitor Control Panel功能設(shè)定的啟動(dòng)指令)
P433=3002(通過(guò)DP通訊,Drivemonitor Control Panel功能設(shè)定的速度給定值)
點(diǎn)擊Drivemonitor中,,在Operate下拉菜單中勾選“Set Process Data”,,即可獲得Control Panel 控制權(quán),此時(shí)可以使用Control Panel控制裝置啟停和運(yùn)行,。
按照上述設(shè)定,,可以實(shí)現(xiàn)通過(guò)STEP7使用DP通訊方式調(diào)試SIMOREG 6RA70的功能。
在電網(wǎng)-變頻器-電機(jī)-負(fù)載構(gòu)成的驅(qū)動(dòng)系統(tǒng)中,,能量的傳遞是雙向的,。電動(dòng)機(jī)工作模式時(shí),電能從電網(wǎng)經(jīng)由變頻器傳遞到電機(jī),,轉(zhuǎn)換為機(jī)械能帶動(dòng)負(fù)載,,負(fù)載因此具有動(dòng)能或勢(shì)能;當(dāng)負(fù)載釋放這些能量以求改變運(yùn)動(dòng)狀態(tài)時(shí),,電機(jī)被負(fù)載所帶動(dòng),,進(jìn)入發(fā)電機(jī)工作模式,向前級(jí)反饋已轉(zhuǎn)換為電形式的能量,,這些能量被稱為再生制動(dòng)能量,,可以通過(guò)變頻器返回電網(wǎng),或者消耗在變頻器系統(tǒng)的制動(dòng)電阻中,。如圖1-1所示,。
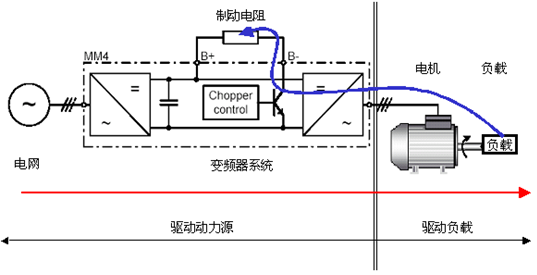
圖1-1 驅(qū)動(dòng)系統(tǒng)的能量流向
較大制動(dòng)能量的產(chǎn)生經(jīng)常出現(xiàn)在下面幾種場(chǎng)合里:
? 起重設(shè)備的重物下放過(guò)程
? 大慣量負(fù)載設(shè)備的快速減速過(guò)程
? 游梁式抽油機(jī)的驢頭下放過(guò)程等等。
西門子變頻器MM440由三部分構(gòu)成,,整流部分,,直流回路部分,逆變部分,。當(dāng)MM440作為驅(qū)動(dòng)轉(zhuǎn)換源而處在上述的制動(dòng)過(guò)程時(shí),,制動(dòng)能量將通過(guò)其逆變部分返回到直流回路,由于整流部分由不可控的二極管組成,,制動(dòng)能量無(wú)法回到電網(wǎng),,造成直流回路電壓泵升,進(jìn)而導(dǎo)致MM440因直流回路電壓過(guò)高(F0002)而停機(jī),。為避免上述情形的發(fā)生,,MM440 提供了動(dòng)態(tài)制動(dòng)功能,即在直流回路上安裝一個(gè)制動(dòng)單元,,再配以適當(dāng)?shù)闹苿?dòng)電阻,,將制動(dòng)能量在該電阻上以熱能的形式消散。A-F尺寸的MM440已將制動(dòng)單元集成在變頻器內(nèi)部,,只需選配制動(dòng)電阻,,安裝在MM440端子B+ B- 上,,然后調(diào)整相應(yīng)的參數(shù)即可,而功率相對(duì)較大的FX,、GX尺寸MM440內(nèi)部沒(méi)有集成制動(dòng)單元,,需要從SIMOVERT MASTERDRIVES的產(chǎn)品目錄里選配相應(yīng)的制動(dòng)單元以及制動(dòng)電阻。
本章將介紹制動(dòng)能量的簡(jiǎn)單計(jì)算以及MM440制動(dòng)單元的基本工作原理,,幫助您實(shí)現(xiàn)西門子MM440變頻器制動(dòng)電阻的正確選型,。
二 制動(dòng)能量的簡(jiǎn)單計(jì)算
? 制動(dòng)能量的產(chǎn)生
根據(jù)電機(jī)理論, 定子中通入同步頻率 ?1的交流電流, 在氣隙中產(chǎn)生順時(shí)針旋轉(zhuǎn)磁場(chǎng)作用在轉(zhuǎn)子上,相當(dāng)于轉(zhuǎn)子繞組逆時(shí)針運(yùn)動(dòng)切割旋轉(zhuǎn)磁場(chǎng),,轉(zhuǎn)子回路因而感應(yīng)出電流產(chǎn)生旋轉(zhuǎn)力矩M,,方向如圖2-1中a所示。經(jīng)過(guò)負(fù)載的平衡,,轉(zhuǎn)子以 (1-s) ?1的速度穩(wěn)定旋轉(zhuǎn),,轉(zhuǎn)子繞組仍然逆時(shí)針以s?1的速度切割旋轉(zhuǎn)磁場(chǎng)。電機(jī)工作在電動(dòng)機(jī)模式下, P = M?Ω>0, 即運(yùn)行在*象限,。
在需要變頻器快速制動(dòng)負(fù)載的情況下,變頻器通入電機(jī)定子中的電流頻率突降為?1′ (?1′ <?1), 由于驅(qū)動(dòng)負(fù)載存在慣性,,轉(zhuǎn)子的轉(zhuǎn)速不能突降,,而是仍然維持在原轉(zhuǎn)速上,導(dǎo)致轉(zhuǎn)子繞組切割旋轉(zhuǎn)磁場(chǎng)的方向改變,,轉(zhuǎn)子電流方向以及電磁力矩方向也因此發(fā)生改變,,如圖2-1中b所示,電機(jī)工作在發(fā)電機(jī)模式下, 開(kāi)始運(yùn)行在第二象限,,P=(-M)?Ω<0, 再生制動(dòng)能量產(chǎn)生,。 如果電機(jī)被負(fù)載拖動(dòng),轉(zhuǎn)子轉(zhuǎn)速超過(guò)變頻器輸入的同步轉(zhuǎn)速,,同樣會(huì)有上述的現(xiàn)象發(fā)生,。

a) 正向運(yùn)行時(shí) b) 轉(zhuǎn)子轉(zhuǎn)速大于同步轉(zhuǎn)速時(shí)
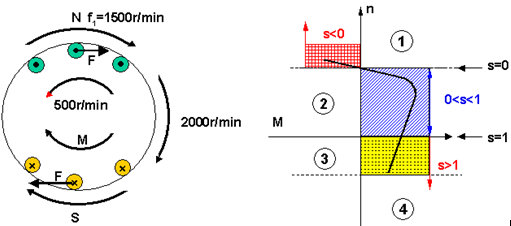
c) 轉(zhuǎn)子旋轉(zhuǎn)方向改變時(shí) d) 電機(jī)四象限圖
圖2-1 制動(dòng)能量產(chǎn)生時(shí)的電機(jī)狀態(tài)
在驅(qū)動(dòng)系統(tǒng)下放重物的過(guò)程中,轉(zhuǎn)子繞組仍然保持逆時(shí)針運(yùn)動(dòng)切割旋轉(zhuǎn)磁場(chǎng),,轉(zhuǎn)子電流以及旋轉(zhuǎn)力矩方向不變,,但是由于切割速度過(guò)快,轉(zhuǎn)子電流產(chǎn)生的祛磁磁場(chǎng)將能量返回了定子側(cè),,電機(jī)工作在發(fā)電機(jī)模式下, 開(kāi)始運(yùn)行在第四象限,,如圖2-1中 c 所示,P=M?(-Ω)<0, 再生制動(dòng)能量產(chǎn)生,。
? 制動(dòng)能量的簡(jiǎn)單計(jì)算
例1 某客戶將MM440 應(yīng)用在升降驅(qū)動(dòng)設(shè)備上,,并要求在6.25秒內(nèi)以0.4m/s的速度下 放500kg的重物,每30s重復(fù)一次該過(guò)程,應(yīng)當(dāng)如何計(jì)算制動(dòng)功率,?
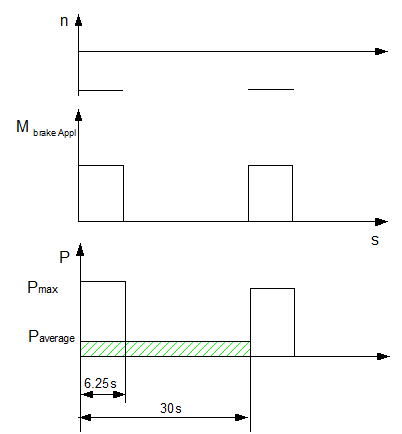
重物的勢(shì)能為: A= m x g x h =500kg x 9.81 x (0.4m/s x 6.25s)=12263J
大 功率為: P brake Appl max = A/s = 12263J/6.25s = 1962W
平均 功率為: P brake Appl average = 1962W x 6.25s / 30s= 392.4W
例2 某驅(qū)動(dòng)負(fù)載需要從2900RPM的速度降至為0,,其驅(qū)動(dòng)數(shù)據(jù)見(jiàn)表1,,如何計(jì)算反饋回變頻器直流側(cè)的制動(dòng)能量?
電動(dòng)機(jī)額定功率 Pmotor N=5.5 KW
電動(dòng)機(jī)效率 ?motor =0.865
電動(dòng)機(jī)額定轉(zhuǎn)速 N motor N= 2925 RPM
電動(dòng)機(jī)轉(zhuǎn)動(dòng)慣量 J motor =0.015kgm2
負(fù)載轉(zhuǎn)動(dòng)慣量 J load =0.4 kgm2
電動(dòng)機(jī)高運(yùn)行轉(zhuǎn)速 nmax =2900RPM
制動(dòng)時(shí)間 t brake appl =5s
負(fù)載工作周期 t cycle appl =15s
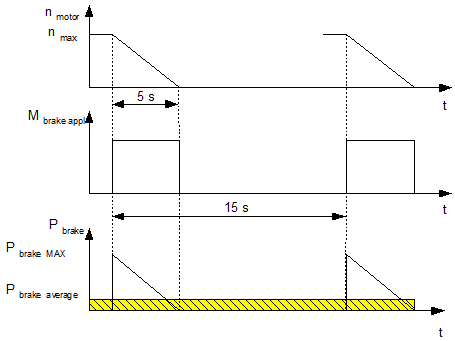
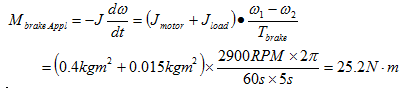
產(chǎn)生的制動(dòng)轉(zhuǎn)矩:
一個(gè)周期內(nèi)產(chǎn)生的大制動(dòng)功率:

一個(gè)周期內(nèi)的總制動(dòng)能量:


一個(gè)周期內(nèi)的平均制動(dòng)功率:

三 MM440 制動(dòng)單元的基本工作原理
? 制動(dòng)單元激活電壓與直流回路故障電壓
按照上述的計(jì)算方法得出的再生制動(dòng)能量將反饋到變頻器的內(nèi)部,,造成直流回路上電壓泵升,。為了避免變頻器因直流回路過(guò)電壓F0002而跳閘,當(dāng)電壓上升到臨界點(diǎn) UDC chopper 時(shí),,制動(dòng)單元就被激活,,并按照預(yù)先規(guī)定的負(fù)載工作周期將制動(dòng)能量消耗在外接制動(dòng)電阻上,拉動(dòng)直流回路電壓下降,。如果制動(dòng)能量過(guò)大,,未能在規(guī)定時(shí)間內(nèi)得到散逸,那么直流回路電壓將繼續(xù)上升,,直到F0002跳閘,。如圖3-1所示。
圖3-1直流回路電壓的上升過(guò)程
| 制動(dòng)單元觸發(fā)臨界電壓 UDC chopper有兩種算法,,采用哪一種,,則取決于MM440 參數(shù)P1254 | 若P1254=0 | 1.13 x  x P0210 x P0210 |
| 若P1254=1 | 0.98 x r1242 |
表3-1 激活動(dòng)態(tài)制動(dòng)功能的直流回路電壓值
? 制動(dòng)單元?jiǎng)幼鬟^(guò)程
MM440變頻器制動(dòng)單元的核心是一個(gè)門限電壓控制斬波器(IGBT transistor),當(dāng)它導(dǎo)通時(shí)再生制動(dòng)能量被外接制動(dòng)電阻吸收,,轉(zhuǎn)化成熱能得以釋放,。斬波器的工作頻率 f chopper為2KHz,占控比 t chopper on 由變頻器內(nèi)部的監(jiān)控系統(tǒng)決定,。如圖3-2所示,。
圖3-2 動(dòng)態(tài)制動(dòng)的操作方式
當(dāng)再生制動(dòng)能量迫使直流回路電壓達(dá)到UDC chopper時(shí),制動(dòng)單元自動(dòng)投入運(yùn)行,,由監(jiān)控系統(tǒng)為斬波器選擇適當(dāng)?shù)恼伎乇?,制?dòng)能量被制動(dòng)電阻吸收。
? 如果制動(dòng)能量少于在制動(dòng)電阻上消耗的能量( P brake resistor=VDC2 / Rmin) ,,那么直流回路電壓會(huì)很快下降到UDC chopper之下,,制動(dòng)單元會(huì)在開(kāi)通2ms之后自動(dòng)關(guān)閉,占控比的選擇在通路1上完成,。 若直流回路電壓再次達(dá)到UDC chopper,,該過(guò)程將被重復(fù)。
? 如果制動(dòng)能量多于此時(shí)在制動(dòng)電阻上消耗的能量,,那么盡管制動(dòng)自動(dòng)已經(jīng)投入運(yùn)行,,直流回路電壓仍然會(huì)繼續(xù)上升,由監(jiān)控系統(tǒng)選擇的占控比也快速線性增加,,直到占控比為1(通道1),,斬波器持續(xù)開(kāi)通,制動(dòng)電阻在此其間持續(xù)吸收制動(dòng)能量,。為了保護(hù)此時(shí)的制動(dòng)電阻不會(huì)因吸收了過(guò)多能量而過(guò)熱損壞,,必須事先根據(jù)制動(dòng)電阻的制動(dòng)能力選擇適當(dāng)?shù)某掷m(xù)工作時(shí)限 t chopper on,。當(dāng)持續(xù)工作時(shí)限達(dá)到時(shí),切換到通道2,,占控比自動(dòng)被修正為P1237中設(shè)定的值以減少制動(dòng)能量進(jìn)入制動(dòng)電阻,,令其有充分的時(shí)間冷卻,此時(shí)直流回路電壓將有所回升,。其過(guò)程如圖3-3所示,。可見(jiàn),,如果電阻值選擇的太小,,或者P1237 的值選擇不當(dāng),會(huì)造成制動(dòng)能量因吸收不凈而導(dǎo)致的直流回路電壓繼續(xù)上升,,而制動(dòng)電阻會(huì)因過(guò)熱而損壞,。
MM440制動(dòng)單元的斬波器為通道2規(guī)定了5種占控比,即負(fù)載工作周期,,由參數(shù)P1237 來(lái)選擇 ,。列表3-2如下。
| P1237 | t chopper on (斬波器占控比為1的長(zhǎng)時(shí)間) | P brake resistor average | |
| 0 | 0% | 動(dòng)態(tài)制動(dòng)未激活 | 0 |
| 1 | 5% | 12.0s | 0.05 P brake Appl max |
| 2 | 10% | 12.6s | 0.1 P brake Appl max |
| 3 | 20% | 14.2s | 0.2 P brake Appl max |
| 4 | 50% | 22.8s | 0.5 P brake Appl max |
| 5 | 100% | 在制動(dòng)單元激活狀態(tài)下始終開(kāi)通 | 1 P brake Appl max |
表3-2 MM440的負(fù)載工作周期
四 制動(dòng)電阻的計(jì)算以及選型
? 西門子制動(dòng)電阻的說(shuō)明
西門子MICROMASTER 變頻器產(chǎn)品樣本DA51.2 中列出的制動(dòng)電阻只是按照P1237=1即5%的工作負(fù)載周期來(lái)進(jìn)行設(shè)計(jì)的,。例如: 訂貨號(hào)為6SE6400-4BC05-0AA0的制動(dòng)電阻,,小阻值為180?,可以承受大直流回路電壓為420V ,,因此該制動(dòng)電阻可在12秒內(nèi)連續(xù)開(kāi)通,吸收 Pbrake resistor max = U dc max 2 /R min =980W的大制動(dòng)功率,。12秒后,,僅能承擔(dān)5%的大制動(dòng)功率,即約50W 的連續(xù)導(dǎo)通功率,,直到240秒后制動(dòng)電阻得到充分的冷卻,,方可再次承擔(dān)12秒的大制動(dòng)功率。
? 制動(dòng)電阻的選擇與校驗(yàn)
為MM440變頻器配置制動(dòng)電阻,,需要滿足二個(gè)條件:
1) 制動(dòng)電阻大功率 P brake resistor max >= 大制動(dòng)功率P brake Appl max
2) 負(fù)載工作周期內(nèi)的制動(dòng)電阻連續(xù)功率 P brake resistor average >=
制動(dòng)周期內(nèi)的平均制動(dòng)功率 P brake Appl average
下面舉例說(shuō)明如何選擇制動(dòng)電阻, 請(qǐng)回顧第二節(jié)中的例2,,為5.5KW 、3~380-480V的MM440配置制動(dòng)電阻,,按照樣本DA51.2初選6SE6400-4BD16-5CA0
一個(gè)制動(dòng)周期內(nèi)產(chǎn)生的大制動(dòng)功率: P brake Appl max = 6.6kW
制動(dòng)電阻可以承受的大制動(dòng)功率: P brake resistor max =12.6 kW
P brake Appl max < P brake resistor max *個(gè)條件滿足
一個(gè)制動(dòng)周期內(nèi)的平均制動(dòng)功率: P brake Appl average =1.1kW
負(fù)載工作周期內(nèi)的制動(dòng)電阻連續(xù)功率: P brake resistor average = 0.65 kW
P brake Appl average > P brake resistor average第二個(gè)條件不滿足
表明該制動(dòng)電阻沒(méi)有足夠的容量接受1.1kW的制動(dòng)能量,。在此,可以提出兩個(gè)解決方案:
1)采用四個(gè)該型號(hào)電阻,,兩并兩串地接入,,見(jiàn)圖3-4??偟闹苿?dòng)阻值并未改變,,因而能夠承受的大制動(dòng)功率 P brake max = U dc max 2 /R min 也未改變,。 但是負(fù)載工作周期內(nèi)的制動(dòng)電阻連續(xù)功率卻提高了4倍,
P brake resistor average = 0.65kW × 4 = 2.6kW,。此時(shí)P1237 必須放開(kāi)限制,,設(shè)置為3,即負(fù)載工作周期為20%,。
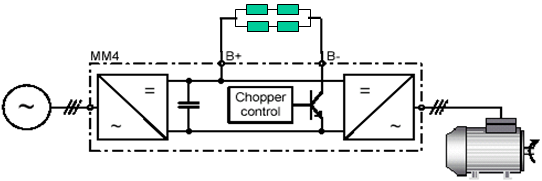
圖3-4 制動(dòng)電阻的接入方法
3) 選擇其他型號(hào)大容量的制動(dòng)電阻,,例如采用MASTERDRIVES 產(chǎn)品系列中訂貨號(hào)為6SE7018-0ES87-2DC0的制動(dòng)電阻,其阻值為80?,, 因此能夠承受的大制動(dòng)功率P brake max =U dc max 2 /R min =8.82kW,,
P brake Appl max < P brake resistor max *個(gè)條件滿足
因?yàn)镸ASTERDRIVES 產(chǎn)品系列的制動(dòng)電阻均是按照20%的負(fù)載工作周期制定的,因此需要將P1237設(shè)置3,,P brake resistor average =8.82kW×0.2=1.764kW
P brake Appl average < P brake resistor average第二個(gè)條件滿足
? FX-GX 制動(dòng)單元與制動(dòng)電阻選擇
在MICROMASTER DRIVES系列中,,僅在外形尺寸為A-F的MM440里集成了制動(dòng)單元,只需再選擇一個(gè)適當(dāng)?shù)耐饨又苿?dòng)電阻即可,。外形尺寸為FX ,、GX的MM440因?yàn)楣β氏鄬?duì)較大,不再在內(nèi)部集成制動(dòng)單元,,而是需要采用MASTERDRIVES系列中的外接制動(dòng)單元以及制動(dòng)電阻,。其選擇方法參見(jiàn)MASTERDRIVES產(chǎn)品樣本。
? MM440 中相關(guān)動(dòng)態(tài)制動(dòng)的必要參數(shù)設(shè)置
P1233=0 禁止直流制動(dòng)
P1234=0 禁止復(fù)合制動(dòng)
P1240=0 禁止直流電壓控制器功能
P1254=0或1 選擇 UDC chopper的計(jì)算方法
P1237>0 使能動(dòng)態(tài)制動(dòng)功能
 化工儀器網(wǎng)
化工儀器網(wǎng)