 化工儀器網(wǎng)
化工儀器網(wǎng)










詳細(xì)介紹
陜西西門子代理商
上海盟疆有限公司工業(yè)業(yè)務(wù)領(lǐng)域致力于為客戶提供高品質(zhì)的服務(wù),,追求客戶的滿意是我們始終如一的目標(biāo)
,。在中國(guó),工業(yè)業(yè)務(wù)領(lǐng)域擁有一支技術(shù)過(guò)硬,、經(jīng)驗(yàn)豐富的工程師隊(duì)伍,,為客戶提供7x24小時(shí)全天候服務(wù)。專業(yè)的服
務(wù)人員和遍布全國(guó)的服務(wù)及備件網(wǎng)絡(luò)將對(duì)客戶的服務(wù)需求迅速作出響應(yīng),,將由設(shè)備故障引起的損失降低到小的程
度,。
西門子還在交通,、樓宇,、城市基礎(chǔ)設(shè)施等方面積極推動(dòng)中國(guó)現(xiàn)代城市化的進(jìn)程。2015年9月,,西門子在中國(guó)一個(gè)
綜合交通管理項(xiàng)目——珠海市綜合交通管理平臺(tái)一期工程正式通過(guò)驗(yàn)收,。該平臺(tái)引入西門子為珠海量身定制的
“綠色交通指標(biāo)體系”,通過(guò)整合所有市民出行相關(guān)的交通信息,,實(shí)時(shí)收集,、篩選和分析海量數(shù)據(jù),不僅能有
效為城市管理者提供決策量化依據(jù)和標(biāo)準(zhǔn),,也為市民出行提供實(shí)實(shí)在在的便利,。
此外,西門子攜手中國(guó)南車株洲電力機(jī)車有限公司獲得為武漢首條有軌電車線路的21列100%低地板有軌電車提供
核心部件的訂單,。這一項(xiàng)目將更好地滿足城市公共交通的多樣性需求,,*公交系統(tǒng)與地鐵系統(tǒng)間的運(yùn)量
空白。
在樓宇科技方面,西門子已為國(guó)家會(huì)展中心(上海)——目前大的會(huì)展綜合體,,提供樓宇的消防,、配電和保
護(hù)等一系列產(chǎn)品和解決方案,在確保場(chǎng)館舒適性和安全性的前提下,,提高能效,。
在商業(yè)地產(chǎn)方面,西門子為上海丁香商業(yè)中心提供了從配電工程到樓宇自動(dòng)化的整體解決方案,,其中包括變
壓器,、中低壓開(kāi)關(guān)柜,以及樓控自控系統(tǒng),、消防,、EIB照明控制系統(tǒng)等。
決方案大的供應(yīng)商之一,,西門子為客戶提供*診療產(chǎn)品和解決方案,,從預(yù)防、早期檢測(cè),、診斷到治療和后期
護(hù)理,,支持中國(guó)的各級(jí)醫(yī)療機(jī)構(gòu),并幫助他們?cè)卺t(yī)療各個(gè)環(huán)節(jié)應(yīng)對(duì)挑戰(zhàn),、獲得成功,。中國(guó)是西門子在醫(yī)療領(lǐng)域重
要的市場(chǎng)之一。近年來(lái),,西門子累計(jì)投入數(shù)億元人民幣,,分別用于在西門子上海醫(yī)學(xué)園區(qū)、西門子愛(ài)克斯射
線真空技術(shù)(無(wú)錫)有限公司,、西門子(深圳)磁共振有限公司研發(fā)和生產(chǎn)各類用于影像診斷的產(chǎn)品,。其中西門
子上海醫(yī)學(xué)園區(qū)如今已發(fā)展成為中國(guó)大的醫(yī)療設(shè)備基地之一。
以強(qiáng)大的實(shí)體業(yè)務(wù)為基礎(chǔ),,西門子還為企業(yè)客戶提供專業(yè),、可靠的金融解決方案。在中國(guó),,西門子為中國(guó)企
業(yè)提供定制化的設(shè)備融資解決方案,,業(yè)務(wù)覆蓋西門子生產(chǎn)的醫(yī)療儀器、工業(yè)設(shè)施,、樓宇設(shè)備,、發(fā)電和天然氣相關(guān)
設(shè)備,以及機(jī)床,、制造業(yè),、建筑機(jī)械和交通等領(lǐng)域的第三方設(shè)備,。多年來(lái),西門子在中國(guó)已經(jīng)為2000多家公立,、
民營(yíng)醫(yī)院提供了資金支持,,幫助1000多家中小企業(yè)完成了設(shè)備升級(jí)換代,并與數(shù)百家生產(chǎn)商和渠道商建立了牢固
的合作關(guān)系,。
(2)PC/PPI電纜,、S7-200、電源模塊,、通信電纜,。
(3)V20驅(qū)動(dòng)裝置和一臺(tái)PC機(jī)。
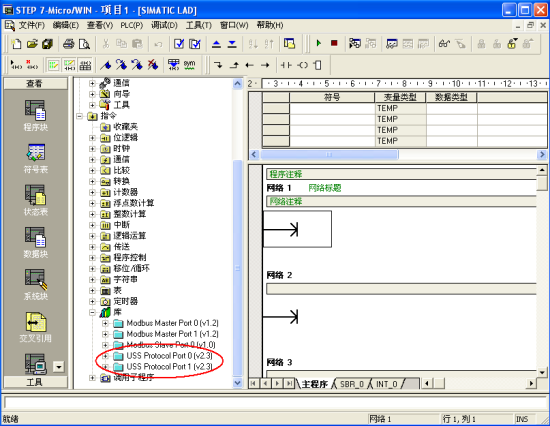
2,、在使用MicroWin software 創(chuàng)建項(xiàng)目之前,,確認(rèn)USS庫(kù)文件已經(jīng)安裝:
3、創(chuàng)建一個(gè)例程:
3.1 設(shè)置通訊接口
本例程使用PC/PPI電纜,。

3.2 建立PC和PLC之間的連接
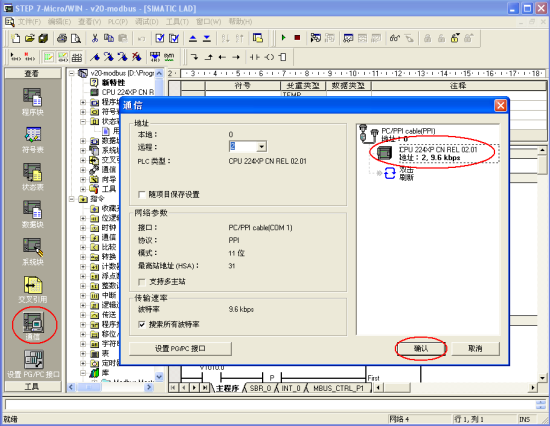
“雙擊刷新”搜索到PLC后,,點(diǎn)擊”確認(rèn)”。
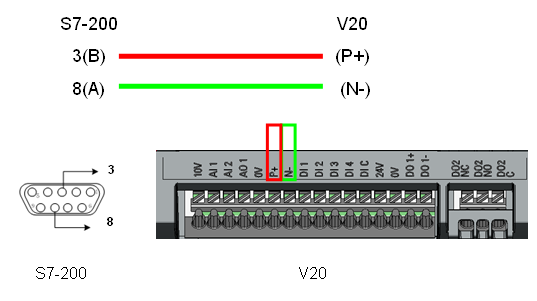
3.3 用電纜將S7-200 Port 0端口與V20的RS485接口相連(注意端口連接規(guī)則:V20的
P+對(duì)3,、N-對(duì)8),,如下圖所示:
3.4 變頻器參數(shù)設(shè)置:
V20 可以通過(guò)選擇連接宏Cn010實(shí)現(xiàn)USS控制,也可以通過(guò)直接更改變頻器參數(shù)的方法來(lái)實(shí)現(xiàn),。參數(shù)設(shè)置如下表所示:
表一:
| 參數(shù) | 描述 | Cn010默認(rèn)值 | 實(shí)際設(shè)置 | 備注 |
| P0700[0] | 選擇命令源 | 5 | 5 | RS485為命令源 |
| P1000[0] | 選擇頻率 | 5 | 5 | RS485為速度設(shè)定值 |
| P2023 | RS485協(xié)議選擇 | 1 | 1 | USS協(xié)議 |
| P2010[0] | USS/MODBUS波特率 | 8 | 6 | 波特率為9600bps |
| P2011[0] | USS地址 | 1 | 3 | 變頻器的USS地址 |
| P2012[0] | USS PZD長(zhǎng)度 | 2 | 2 | PZD部分的字?jǐn)?shù) |
| P2013[0] | USS PKW長(zhǎng)度 | 127 | 127 | PKW部分字?jǐn)?shù)可變 |
| P2014[0] | USS/MODBUS報(bào)文間斷時(shí)間 | 500 | 0 | 接收數(shù)據(jù)時(shí)間 |
3.5 使用USS協(xié)議的初始化模塊初始化S7-200的PORT0端口:
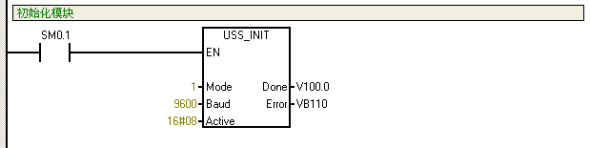
EN使能:每次改變通訊狀態(tài)都應(yīng)該執(zhí)行一次初始化指令,。所以EN信號(hào)應(yīng)該通過(guò)邊沿檢測(cè)元件脈沖激活。陜西西門子代理商
Mode:用這個(gè)USS輸入值選擇通訊協(xié)議,。
1:為端口0USS協(xié)議,,并啟用該協(xié)議。
0:為端口0PPI協(xié)議,,并禁止USS協(xié)議,。
Baud: 波特率:9600,19200…115200,。
Active:激活驅(qū)動(dòng)地址,。
Done:當(dāng)USS_INIT 指令執(zhí)行完成后,,Done=1,。
Error:指令執(zhí)行的結(jié)果,如果有錯(cuò)誤,,顯示錯(cuò)誤代碼,。
Active:激活驅(qū)動(dòng)地址舉例:

3.6 使用USS——CTRL模塊來(lái)控制USS地址為3的變頻器,為了運(yùn)行變頻器需要按照表一設(shè)置參數(shù):

狀態(tài)表:

功能塊定義:
EN:通常情況總是激活,。
RUN:指示驅(qū)動(dòng)為啟用(1),,或禁止(0),。
OFF2:允許V20自由停車。
OFF3:允許V20快速停止,。
F _ACK:V2*復(fù)位,。
DIR:V20轉(zhuǎn)動(dòng)方向(0:逆時(shí)針;1:順時(shí)針),。
Drive:V20地址 0-31,。
Speed:速度給定值,以全速的百分比給出 (-200.0~~200.0%,,負(fù)值時(shí),,V20反向)。
Resp_R:輪詢V20,,掃描時(shí)=1,,并更新下面值。
Error:錯(cuò)誤字節(jié),,參見(jiàn)表:USS指令執(zhí)行錯(cuò)誤,。
Status:V20返回狀態(tài)值。
Speed:V20速度,,(-200.0~~200.0%),。
Run_EN:V20運(yùn)行狀態(tài)(1:運(yùn)行;0:停止),。
D_DIR:V20轉(zhuǎn)動(dòng)方向(0:逆時(shí)針,;1:順時(shí)針)
Inhibit:V20禁止位狀態(tài)。 (0:?jiǎn)⒂茫?:禁止),。要清除禁止位,,必須將Fault清零,
RUN,,OFF2,, OFF3輸入也要清零。
Fault:指示故障狀態(tài),。根據(jù)V2*表確認(rèn)故障,。故障排除后,置位F _ACK使Fault
清零,。
表二:Error 信息
| Error代碼 | 說(shuō)明 |
| 0 | 沒(méi)有錯(cuò)誤 |
| 1 | 驅(qū)動(dòng)未響應(yīng) |
| 2 | 檢測(cè)到驅(qū)動(dòng)響應(yīng)中存在校驗(yàn)和錯(cuò)誤 |
| 3 | 檢測(cè)到驅(qū)動(dòng)響應(yīng)中存在奇偶校驗(yàn)錯(cuò)誤 |
| 4 | 由于用戶程序干擾導(dǎo)致出錯(cuò) |
| 5 | 嘗試執(zhí)行了無(wú)效命令 |
| 6 | 提供的驅(qū)動(dòng)地址無(wú)效 |
| 7 | 該通訊接口不能實(shí)現(xiàn)USS協(xié)議 |
| 8 | 該通訊接口正在忙于處理指令 |
| 9 | 驅(qū)動(dòng)速度輸入溢出 |
| 10 | 驅(qū)動(dòng)響應(yīng)的長(zhǎng)度不正確 |
| 11 | 驅(qū)動(dòng)響應(yīng)的首字符不正確 |
| 12 | 驅(qū)動(dòng)響應(yīng)的長(zhǎng)度字符不正確 |
| 13 | 驅(qū)動(dòng)響應(yīng)錯(cuò)誤 |
| 14 | 給出的DB_PTR地址不正確 |
| 15 | 給出的參數(shù)號(hào)不正確 |
| 16 | 選擇了無(wú)效的協(xié)議 |
| 17 | 啟用USS:不允許更改 |
| 18 | 了無(wú)效的波特率 |
| 19 | 無(wú)通訊:驅(qū)動(dòng)未激活 |
| 20 | 驅(qū)動(dòng)響應(yīng)中的參數(shù)或值不正確 |
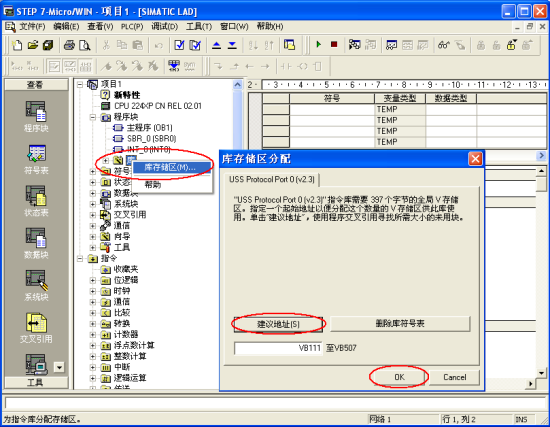
3.7 庫(kù)存儲(chǔ)區(qū)分配:在編譯程序之前,,選擇 “程序塊” ->“ 庫(kù)” 右鍵,選擇“庫(kù)存儲(chǔ)區(qū)”,。在點(diǎn)擊 “建議地址” 選擇V存儲(chǔ)區(qū)的地址后點(diǎn)擊 “OK”退出,。
3.8 讀寫U16類型參數(shù):
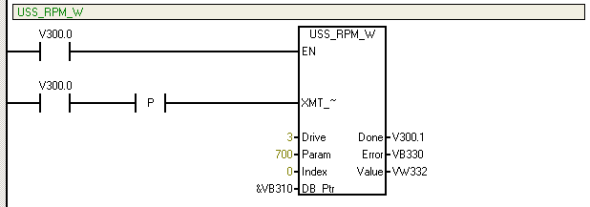
3.81舉例:使用USS_RPM_W讀取參數(shù)P0700的值;
狀態(tài)表:

注意:
(1)讀參數(shù)P0700,,其數(shù)據(jù)類型為U16無(wú)符號(hào)整數(shù),。
(2)只要給V300.0一個(gè)上升沿,,就完成一次P0700參數(shù)的讀操作。
(3)讀入的參數(shù)被放在VW332里,。
(4)需要注意的是Index為0時(shí)代表讀Pxxx.0參數(shù)組
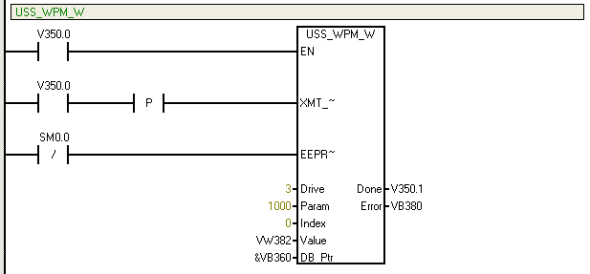
3.8.2 舉例:使用USS_RPM_W設(shè)置參數(shù)P1000,。
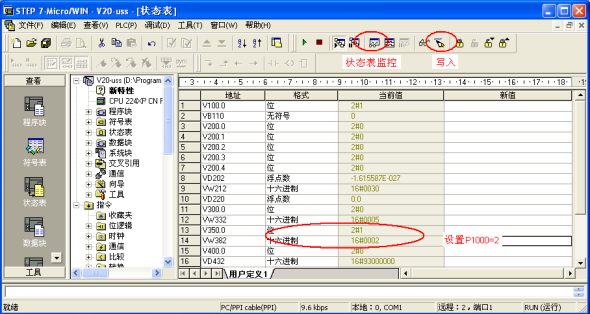
狀態(tài)表:
注意:
(1)寫參數(shù)P1000,其數(shù)據(jù)類型為U16無(wú)符號(hào)整數(shù),。
(2)只要給V350.0一個(gè)上升沿,,就完成一次P1000參數(shù)的寫操作。
(3)EEPR~的邏輯為0時(shí),,寫入的值只保存到RAM中,,為1時(shí),寫入得值保存到EEPROM,。
(4)EEPROM中寫數(shù)據(jù)是有次數(shù)限制的,,V20多不超過(guò)50000次。
3.9 讀寫U32類型參數(shù):
3.9.1舉例:使用USS_RPM_D讀取參數(shù)P0771.In000的值,;
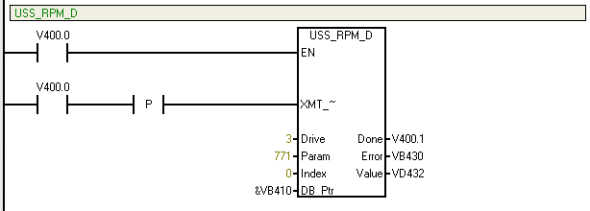
狀態(tài)表:
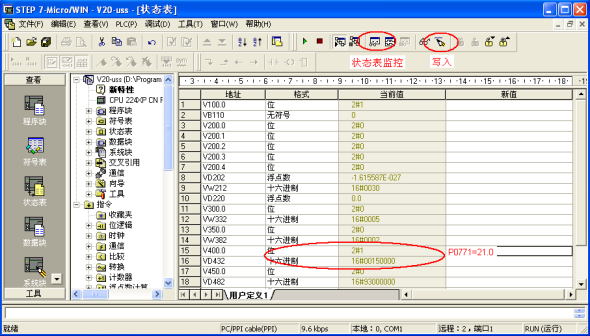
注意:
(1)讀參數(shù)P771,,其數(shù)據(jù)類型為U32無(wú)符號(hào)整數(shù)。
(2)只要給V400.0一個(gè)上升沿,,就完成一次P771參數(shù)的讀操作,。
(3)讀入的參數(shù)被放在VD432里。16#00150000=21.0,。
(4)需要注意的是Index為0時(shí)代表讀Pxxx.0參數(shù)組,。
 化工儀器網(wǎng)
化工儀器網(wǎng)