 化工儀器網(wǎng)
化工儀器網(wǎng)










詳細介紹
那里有賣西門子EMAQ04模塊
6ES7288-3AQ04-0AA0
SIMATIC S7-200 SMART,, 模擬輸出 SM AQ04,4 AO,, +/-10V,,11 Bit 分辨率, 或 4-20mA,,11 Bit 分辨率
西門子今天在北京舉辦“西門子能源管理集團化工行業(yè)峰會”,,重點展示了西門子針對化工行業(yè)客戶在能源管理領(lǐng)域提供的優(yōu)秀的業(yè)務(wù)組合,并與業(yè)界專家和客戶共同探討如何助力化工行業(yè)提升能源可靠性和效率,。
“西門子擁有覆蓋面廣的能源管理業(yè)務(wù)組合,,致力于實現(xiàn)電網(wǎng)互聯(lián)、全集成能源管理和高度靈活的電力供應(yīng),。中國化工行業(yè)市場規(guī)模穩(wěn)定增長,,市場發(fā)展?jié)摿薮蟆N覀兿Mc化工行業(yè)的客戶緊密合作,針對他們在能源管理領(lǐng)域所面臨的痛點,,幫助他們應(yīng)對在電力供應(yīng)的可靠性,、能效及環(huán)保方面面臨的挑戰(zhàn),”西門子(中國)有限公司執(zhí)行副總裁,、西門子大中華區(qū)能源管理集團總經(jīng)理麥明銳(Markus Mildner)表示,。

化工行業(yè)的電力供應(yīng)面臨的首要挑戰(zhàn)是供電的可靠性,。作為重資產(chǎn)行業(yè),,化工行業(yè)在生產(chǎn)過程中必須確保大量大型機電設(shè)備連續(xù)不間斷的運轉(zhuǎn),,持續(xù),、穩(wěn)定的電力供應(yīng)成為連續(xù)生產(chǎn)的先決條件。此外,,隨著市場環(huán)境和產(chǎn)業(yè)政策的變化,,化工行業(yè)面臨的整體能效挑戰(zhàn)正在不斷加大。一方面,,能源成本,、勞動力成本不斷上升;另一方面,,政府對高能耗,、高污染生產(chǎn)方式的監(jiān)管和遏制力度不斷加大。更高的能源效率成為解決這一問題的關(guān)鍵,。后,十三五期間政府及社會對于環(huán)保生產(chǎn)的要求越來越高,,化工行業(yè)必須尋求更加清潔的能源,分布式發(fā)電成為大勢所趨,。因此,,可靠,、高效和環(huán)保的電力供應(yīng)及能源管理是化工企業(yè)保證穩(wěn)定生產(chǎn),、降低運營成本,、實現(xiàn)可持續(xù)發(fā)展的重要保障之一,。
針對化工行業(yè)的具體需求,,西門子能源管理集團憑借其業(yè)界優(yōu)秀的涵蓋高中低壓的輸配電技術(shù),,以及高度自動化和智能化的能源及數(shù)字電網(wǎng)解決方案和服務(wù),,致力于為化工行業(yè)提供高效,、可靠和綠色的能源管理解決方案,。
2017年2月,西門子與京博石化簽訂戰(zhàn)略合作框架協(xié)議,,助力京博石化工廠的數(shù)字化和智能化轉(zhuǎn)型,。京博石化為中國化工企業(yè)500強公司,在業(yè)務(wù)快速增長的同時,,也面臨著面向“中國制造2025”的產(chǎn)業(yè)升級,。此次西門子能源管理集團六家工廠*次共同簽訂框架合同,將為京博石化提供35千伏及10千伏變壓器,、中壓柜,、400伏低壓柜、監(jiān)控后臺保護等產(chǎn)品,,為京博煉廠打造完整,、智能的能源供應(yīng)及管理方案,標(biāo)志著西門子與化工行業(yè)客戶的新型戰(zhàn)略合作伙伴關(guān)系轉(zhuǎn)型又邁出堅實一步,。
“西門子能源管理集團行業(yè)峰會”是繼“西門子能源管理集團中國百城巡展”之后推出的又一大市場戰(zhàn)略舉措,,旨在通過舉辦系列行業(yè)峰會,向客戶提供行業(yè)優(yōu)選解決方案,,加強與行業(yè)客戶的交流與合作,,從而進一步拓展能源管理的行業(yè)應(yīng)用。此次化工行業(yè)峰會是系列行業(yè)峰會的*站,,未來將針對軌道交通,、數(shù)據(jù)中心等行業(yè)舉辦峰會,,讓萬千中國客戶領(lǐng)略西門子能源管理解決方案在行業(yè)應(yīng)用方面的無限潛能。

描述
新的模塊化 SIMATIC S7-1200 控制器是我們新推出產(chǎn)品的核心,,可實現(xiàn)簡單卻高度精確的自動化任務(wù)。SIMATIC S7-1200 控制器實現(xiàn)了模塊化和緊湊型設(shè)計,,功能強大,、投資安全并且*適合各種應(yīng)用。
可擴展性強,、靈活度高的設(shè)計,,可實現(xiàn)高標(biāo)準(zhǔn)工業(yè)通信的通信接口以及一整套強大的集成技術(shù)功能,使該控制器成為完整,、全面的自動化解決方案的重要組成部分,。
SIMATIC HMI 基礎(chǔ)面板的性能經(jīng)過優(yōu)化,旨在與這個新控制器以及強大的集成工程組態(tài)*兼容,,可確保實現(xiàn)簡化開發(fā),、快速啟動、精確監(jiān)控和高等級的可用性,。正是這些產(chǎn)品之間的相互協(xié)同及其創(chuàng)新性的功能,幫助您將小型自動化系統(tǒng)的效率提升到一個*的水平,。
優(yōu)勢
*整合
SIMATIC HMI 基礎(chǔ)面板的性能經(jīng)過優(yōu)化,,旨在與這個新控制器以及強大的集成工程組態(tài)*兼容,可確保實現(xiàn)簡化開發(fā),、快速啟動,、精確監(jiān)控和高等級的可用性。正是這些產(chǎn)品之間的相互協(xié)同及其創(chuàng)新性的功能,,幫助您將小型自動化系統(tǒng)的效率提升到一個*的水平,。
用于可擴展設(shè)計中緊湊自動化的模塊化概念。
SIMATIC S7-1200 具有集成的 PROFINET 接口,、強大的集成技術(shù)功能和可擴展性強,、靈活度高的設(shè)計。它實現(xiàn)了通信簡便,,有效的技術(shù)任務(wù)解決方案,,并*一系列的獨立自動化系統(tǒng)的 應(yīng)用需求。
在工程組態(tài)中實現(xiàn)高效率.
使用*集成的新工程組態(tài) SIMATIC STEP 7 Basic,,并借助 SIMATIC WinCC Basic 對 SIMATIC S7-1200 進行編程,。SIMATIC STEP 7 Basic 的設(shè)計理念是直觀、易學(xué)和易用,。這種設(shè)計理念可以使您在工程組態(tài)中實現(xiàn)高效率,。一些智能功能,例如直觀編輯器、拖放功能和“IntelliSense”(智能感知)工具,,能讓您的工程進行的更加迅速,。這款新軟件的體系結(jié)構(gòu)源于對未來創(chuàng)新的不斷追求,西門子在軟件開發(fā)領(lǐng)域已經(jīng)有很多年的經(jīng)驗,,因此 SIMATIC STEP 7 的設(shè)計是以未來為導(dǎo)向的,。那里有賣西門子EMAQ04模塊
設(shè)計和功能
SIMATIC S7-1200 CPU
SIMATIC S7-1200 系統(tǒng)有三種不同模塊,分別為 CPU 1211C,、CPU 1212C 和 CPU 1214C,。其中的每一種模塊都可以進行擴展,以*您的系統(tǒng)需要,??稍谌魏?CPU 的前方加入一個信號板,輕松擴展數(shù)字或模擬量 I/O,,同時不影響控制器的實際大小,。可將信號模塊連接至 CPU 的右側(cè),,進一步擴展數(shù)字量或模擬量 I/O 容量,。CPU 1212C 可連接 2 個信號模塊,CPU 1214C 可連接 8 個信號模塊,。后,,所有的 SIMATIC S7-1200 CPU 控制器的左側(cè)均可連接多達 3 個通訊模塊,便于實現(xiàn)端到端的串行通訊,。
安裝簡單方便
所有的 SIMATIC S7-1200 硬件都有內(nèi)置的卡扣,,可簡單方便地安裝在標(biāo)準(zhǔn)的 35 mm DIN 導(dǎo)軌上。這些內(nèi)置的卡扣也可以卡入到已擴展的位置,,當(dāng)需要安裝面板時,,可提供安裝孔。SIMATIC S7-1200 硬件可以安裝在水平或豎直的位置,,為您提供其它安裝選項,。這些集成的功能在安裝過程中為用戶提供了大的靈活性,并使 SIMATIC S7-1200 為各種應(yīng)用提供了實用的解決方案,。.
節(jié)省空間的設(shè)計
所有的 SIMATIC S7-1200 硬件都經(jīng)過專門設(shè)計,,以節(jié)省控制面板的空間。例如,,經(jīng)過測量,,CPU 1214C 的寬度僅為 110 mm,CPU 1212C 和 CPU 1211C 的寬度僅為 90 mm,。結(jié)合通信模塊和信號模塊的較小占用空間,,在安裝過程中,,該模塊化的緊湊系統(tǒng)節(jié)省了寶貴的空間,為您提供了高效率和大靈活性,。
SIMATIC S7-1200
可擴展的緊湊自動化的模塊化概念
SIMATIC S7-1200 具有集成的 PROFINET 接口,、強大的集成技術(shù)功能和可擴展性強、靈活度高的設(shè)計,。它實現(xiàn)了簡便的通信,、有效的技術(shù)任務(wù)解決方案,并能*一系列的獨立自動化需求,。
亮點
可擴展性強,、靈活度高的設(shè)計
信號模塊:
大的 CPU 多可連接八個信號模塊,以便支持其它數(shù)字量和模擬量 I/O,。
信號板:
可將一個信號板連接至所有的 CPU,,讓您通過在控制器上添加數(shù)字量或模擬量 I/O 來自定義 CPU,同時不影響其實際大小,。SIMATIC S7-1200 提供的模塊化概念可讓您設(shè)計控制器系統(tǒng),,以*您應(yīng)用的需求。
內(nèi)存
為用戶程序和用戶數(shù)據(jù)之間的浮動邊界提供多達 50 KB 的集成工作內(nèi)存,。同時提供多達 2 MB 的集成加載內(nèi)存和 2 KB 的集成記憶內(nèi)存,。可選的 SIMATIC 存儲卡可輕松轉(zhuǎn)移程序供多個 CPU 使用,。該存儲卡也可用于存儲其它文件或更新控制器系統(tǒng)固件,。
集成的 PROFINET 接口
集成的 PROFINET 接口用于進行編程以及 HMI 和 PLC-to-PLC 通信。另外,,該接口支持使用開放以太網(wǎng)協(xié)議的第三方設(shè)備。該接口具有自動糾錯功能的 RJ45 連接器,,并提供 10/100 兆比特/秒的數(shù)據(jù)傳輸速率,。它支持多達 16 個以太網(wǎng)連接以及以下協(xié)議:TCP/IP native、ISO on TCP 和 S7 通信,。
SIMATIC S7-1200 集成技術(shù)
SIMATIC S7-1200 具有用于進行計算和測量,、閉環(huán)回路控制和運動控制的集成技術(shù),是一個功能非常強大的系統(tǒng),,可以實現(xiàn)多種類型的自動化任務(wù),。
用于速度、位置或占空比控制的高速輸出
SIMATIC S7-1200 控制器集成了兩個高速輸出,,可用作脈沖序列輸出或調(diào)諧脈沖寬度的輸出,。當(dāng)作為 PTO 進行組態(tài)時,以高達 100 千赫的速度 提供50% 的占空比脈沖序列,,用于控制步進馬達和伺服驅(qū)動器的開環(huán)回路速度和位置,。使用其中兩個高速計數(shù)器在內(nèi)部提供對脈沖序列輸出的反饋,。當(dāng)作為 PWM 輸出進行組態(tài)時,將提供帶有可變占空比的固定周期數(shù)輸出,,用于控制馬達的速度,、閥門的位置或發(fā)熱組件的占空比。
PLCopen 運動功能塊
SIMATIC S7-1200 支持控制步進馬達和伺服驅(qū)動器的開環(huán)回路速度和位置,。使用軸技術(shù)對象和認(rèn)可的 PLCopen 運動功能塊,,在工程組態(tài) SIMATIC STEP 7 Basic 中可輕松組態(tài)該功能。除了“home”和“jog”功能,,也支持移動,、相對移動和速度移動。
驅(qū)動調(diào)試控制面板
工程組態(tài) SIMATIC STEP 7 Basic 中隨附的驅(qū)動調(diào)試控制面板,,簡化了步進馬達和伺服驅(qū)動器的啟動和調(diào)試操作,。
它提供了單個運動軸的自動控制和手動控制,以及在線診斷信息,。
用于閉環(huán)回路控制的 PID 功能
SIMATIC S7-1200 多可支持 16 個 PID 控制回路,,用于簡單的過程控制應(yīng)用。借助 PID 控制器技術(shù)對象和工程組態(tài) SIMATIC STEP 7 Basic 中提供的支持編輯器,,可輕松組態(tài)這些控制回路,。另外,SIMATIC S7-1200 支持 PID 自動調(diào)整功能,,可自動為節(jié)省時間,、積分時間和微分時間計算優(yōu)秀調(diào)整值。
PID 調(diào)試控制面板
SIMATIC STEP 7 Basic 中隨附的 PID 調(diào)試控制面板,,簡化了回路調(diào)整過程,。它為單個控制回路提供了自動調(diào)整和手動控制功能,同時為調(diào)整過程提供了圖形化的趨勢視圖,。
西門子MM4系列變頻器都集成了串行接口,,支持USS通信協(xié)議,通過USS協(xié)議可以對變頻器進行控制和讀寫變頻器參數(shù),。使用S7-300PLC有以下兩種通訊方案:
1. 按照USS協(xié)議要求編寫通訊報文,,計算BCC校驗,適用于從站數(shù)量比較少,,較簡單的應(yīng)用,;
2. 采用DriveES SIMATIC軟件提供的S7-300庫程序,自動生成從站輪詢表程序,,適用于從站數(shù)量比較多,,較復(fù)雜的應(yīng)用。
本文主要介紹通過*種方案實現(xiàn)CPU314-2PtP與MM440的USS通訊,。使用S7-300編寫USS通訊程序分為以下幾個步驟:
1. 依據(jù)USS協(xié)議編寫報文,;
2. 使用S7-300提供的串口數(shù)據(jù)發(fā)送程序發(fā)送USS報文,;
3. 使用S7-300提供的串口數(shù)據(jù)接收程序接收USS報文;
4. 依據(jù)USS協(xié)議分析接收到的報文,。
本文根據(jù)這4個步驟編寫了如下內(nèi)容:第1節(jié)簡單介紹USS協(xié)議內(nèi)容,,了解USS協(xié)議報文格式;第2節(jié)根據(jù)USS協(xié)議列舉了4條報文,;第3節(jié)介紹PLC和變頻器USS通訊的硬件組態(tài),;第4節(jié)介紹通過調(diào)用PLC中的發(fā)送和接收功能塊實現(xiàn)USS協(xié)議報文的發(fā)送和接收。
1 USS協(xié)議介紹
USS協(xié)議是西門子專為驅(qū)動裝置開發(fā)的通信協(xié)議,。USS的工作機制是,,通信是由主站發(fā)起,USS主站不斷循環(huán)輪詢各個從站,,從站根據(jù)收到的指令,,決定是否響應(yīng)主站。從站不會主動發(fā)送數(shù)據(jù),。從站在以下條件滿足時應(yīng)答主站:接收到主站報文沒有錯誤,,并且本從站在接收到主站的報文中被尋址,上述條件不滿足或者主站發(fā)出的是廣播報文,,從站不會做任何響應(yīng),。USS的字符傳輸格式為11位,其中1位起始位,、8位數(shù)據(jù)位,、1偶校驗、1位停止位,。如下表所示:
| 起始位 | 數(shù)據(jù)位 | 校驗位 | 停止位 | |||||||
| 1 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 偶X1 | 1 |
| LSB | MSB | |||||||||
USS字符幀結(jié)構(gòu)
USS協(xié)議的報文由一連串的字符組成,,協(xié)議中定義了它們的功能,如下表所示:
| STX | LGE | ADR | 有效據(jù)區(qū) | BCC | ||||
| 1 | 2 | 3 | … | n | ||||
USS報文結(jié)構(gòu)
? STX:長度1個字節(jié),,總是為02(Hex),,表示一條信息的開始;
? LGE:長度1個字節(jié),,表明在LGE后字節(jié)的數(shù)量,上表中黃色區(qū)域長度,;
? ADR:長度1個字節(jié),,表明從站地址;
? BCC:長度1個字節(jié),,異或校驗和,,USS報文中BCC前面所有字節(jié)異或運算的結(jié)果;
? 有效數(shù)據(jù)區(qū):由PKW區(qū)和PZD區(qū)組成,,如下表所示,。
| PKW區(qū) | PZD區(qū) | ||||||||
| PKE | IND | PWE1 | PWE2 | … | PWEm | PZD1 | PZD2 | PZD1 | PZDn |
USS有效數(shù)據(jù)區(qū)
PKW區(qū)用于主站讀寫從站變頻器參數(shù):
? PKE:長度一個字,結(jié)構(gòu)如下表,,任務(wù)或應(yīng)答ID請參考《MM440使用大全》第13章。
Bit15- Bit 12 Bit 11 Bit 10-Bit 0
| Bit15- Bit 12 | Bit 11 | Bit 10-Bit 0 |
| 任務(wù)或應(yīng)答ID | 0 | 基本參數(shù)號PNU |
PKW結(jié)構(gòu)
變頻器參數(shù)號<2000時,,基本參數(shù)號PNU=變頻器參數(shù)號,,例如P700的基本參數(shù)號PNU=2BC(Hex)(700(Dec)=2BC(Hex))。
變頻器參數(shù)號>=2000時,,基本參數(shù)號PNU=變頻器參數(shù)號-2000(Dec),,例如P2155的基本參數(shù)號PNU=9B(Hex)(2155-2000=155(Dec)=9B(Hex))。
? IND:長度一個字,,結(jié)構(gòu)如下表,。
| Bit15- Bit 12 | Bit 11- Bit 8 | Bit 7 - Bit 0 |
| PNU擴展 | 0(Hex) | 參數(shù)下標(biāo) |
IND結(jié)構(gòu)
變頻器參數(shù)號<2000時,PNU擴展=0(Hex),。
變頻器參數(shù)號>=2000時,,PNU擴展=8(Hex)。
參數(shù)下標(biāo),,例如P2155[2]中括號中的2表示參數(shù)下標(biāo)為2,。
? PWE:讀取或?qū)懭雲(yún)?shù)的數(shù)值
PZD區(qū)用于主站與從站交換過程值數(shù)據(jù):
? PZD1: 主站?從站 控制字
主站?從站 狀態(tài)字
? PZD2: 主站?從站 速度設(shè)定值
主站?從站 速度反饋值
? PZDn: MM430/440支持多8個PZD,MM420支持多4個PZD
根據(jù)傳輸?shù)臄?shù)據(jù)類型和驅(qū)動裝置的不同,,PKW和PZD區(qū)的數(shù)據(jù)長度不是固定的,,可以通過P2012、P2013 設(shè)置,。本例采用4PKW,,2PZD報文格式。
2 USS協(xié)議報文定義
本文通過發(fā)送4個不同功能的報文來演示自定義USS報文的方法,,USS協(xié)議詳細說明請參照《MM440使用大全》第13章,。
例1.把參數(shù)P2155[2]的數(shù)值修改為40.00Hz
| 字節(jié)數(shù) | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 發(fā)送報文 | 2 | 0E | 1 | 30 | 9B | 80 | 2 | 42 | 20 | 0 | 0 | 4 | 7E | 0 | 0 | 3C |
| 應(yīng)答報文 | 2 | 0E | 1 | 20 | 9B | 80 | 2 | 42 | 20 | 0 | 0 | FB | 31 | 0 | 0 | 9C |
報文解釋:
| STX | Byte1 | 起始字符 |
| LGE | Byte2 | 報文長度(字節(jié)3到字節(jié)16共14個字節(jié)) |
| ADR | Byte3 | 從站地址 |
| PKW | Byte4-5 | PKE內(nèi)容: |
| Bit15- Bit 12(任務(wù)ID) =3(Hex),修改參數(shù)數(shù)值雙字 | ||
| Bit15- Bit 12(應(yīng)答ID) =2(Hex),,傳送參數(shù)數(shù)值雙字 | ||
| Bit10- Bit 0(基本參數(shù)號PUN)=2155-2000(Dec)=9B(Hex) | ||
| Byte6-7 | IND內(nèi)容: | |
| Bit15- Bit 12(PNU擴展) =8(Hex),,參數(shù)號大于2000 | ||
| Bit7- Bit 0(參數(shù)下標(biāo))=2(Hex),P2155[2] | ||
| Byte8-11 | 參數(shù)值,,42 20 00 00(Hex)=40.0(浮點數(shù)) | |
| PZD | Byte12-13 | PZD1 |
| Byte14-15 | PZD2 | |
| BCC | Byte16 | 異或校驗和 |
注:黃色標(biāo)記表示應(yīng)答報文中的內(nèi)容
例2.讀取參數(shù)P0700[0]的數(shù)值
| 字節(jié)數(shù) | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 發(fā)送報文 | 2 | 0E | 1 | 12 | BC | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 7E | 0 | 0 | D9 |
| 應(yīng)答報文 | 2 | 0E | 1 | 12 | BC | 0 | 0 | 0 | 0 | 0 | 5 | FB | 31 | 0 | 0 | 6C |
報文解釋:
| STX | Byte1 | 起始字符 |
| LGE | Byte2 | 報文長度(字節(jié)3到字節(jié)16共14個字節(jié)) |
| ADR | Byte3 | 從站地址 |
| PKW | Byte4-5 | PKE內(nèi)容: |
| Bit15- Bit 12(任務(wù)ID) =1(Hex),,讀取參數(shù)數(shù)值 | ||
| Bit15- Bit 12(應(yīng)答ID) =1(Hex),傳送參數(shù)數(shù)值單字 | ||
| Bit10- Bit 0(基本參數(shù)號PUN)=700(Dec)=2BC(Hex) | ||
| Byte6-7 | IND內(nèi)容: | |
| Bit15- Bit 12(PNU擴展) =0(Hex),,參數(shù)號小于2000 | ||
| Bit7- Bit 0(參數(shù)下標(biāo))=0(Hex),,P700[0] | ||
| Byte8-11 | 參數(shù)值,5(Hex)=5(Dec) | |
| PZD | Byte12-13 | PZD1 |
| Byte14-15 | PZD2 | |
| BCC | Byte16 | 異或校驗和 |
注:黃色標(biāo)記表示應(yīng)答報文中的內(nèi)容
例3.不需要讀寫參數(shù)只發(fā)送停止變頻器報文
| 字節(jié)數(shù) | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 發(fā)送報文 | 2 | 0E | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 7E | 0 | 0 | 77 |
| 應(yīng)答報文 | 2 | 0E | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | FB | 31 | 0 | 0 | C7 |
例4.不需要讀寫參數(shù)只送啟動變頻器,、設(shè)定頻率50Hz報文
| 字節(jié)數(shù) | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 發(fā)送報文 | 2 | 0E | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 7F | 40 | 0 | 36 |
| 應(yīng)答報文 | 2 | 0E | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | FF | 34 | 3F | FF | 6 |
例3,、4報文比較簡單只需要定義PZD中的內(nèi)容,PKW區(qū)內(nèi)容可以設(shè)置為0,。
請注意:如果按照以上4個例子發(fā)送報文可能會收到與例子中不一樣的應(yīng)答報文,,這并不代表報文存在問題,,可能由于變頻器狀態(tài)不同或參數(shù)設(shè)置不同造成。例子報文中已經(jīng)計算了BCC校驗的值,,如果使用其他的報文需要自己計算BCC校驗,。
3 硬件組態(tài)
MM4系列變頻器提供的串行接口為RS485接口,S7-300 PLC有3種通訊模塊支持RS485接口:
1. 采用帶有集成RS485接口的CPU例如CPU31X-2PtP,;
2. RS485接口的CP340通訊模塊,;
3. RS485接口的CP341通訊模塊;
以上三種模塊都可以通過下表中的接線方式與MM4變頻器連接,,本文中采用1臺CPU314-2PtP與1臺MM440通訊,。
| 信號 | CPU314-2PtP | MM430/MM440 | MM420 |
| RS485接口針腳 | 端子 | 端子 | |
| P+ | 11 | 29 | 14 |
| N- | 4 | 30 | 15 |
S7-300 RS485接口與MM440 USS接線
3.1 PLC硬件組態(tài)
1) 首先打開STEP7新建項目并插入CPU314-2PtP。
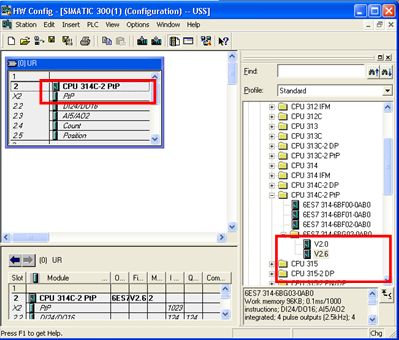
2) 雙擊CPU314-2PtP的X2端口PtP,,打開PTP屬性對話框General欄,,Protocol復(fù)選框中選擇“ASCII”協(xié)議。

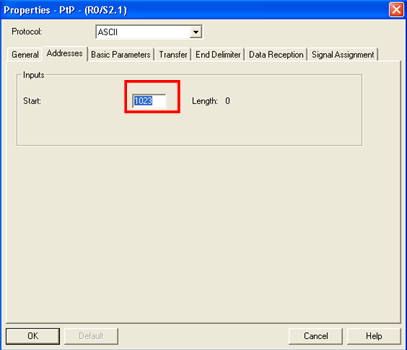
3) Addresses欄中記錄起始地址“1023”,,在后面的編程中使用,。
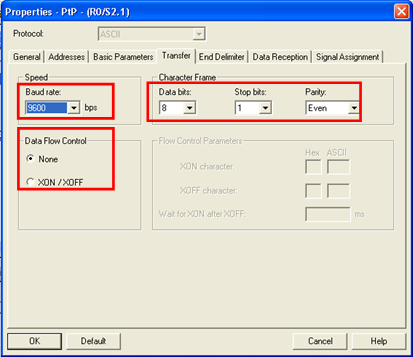
4) Transfer欄中設(shè)置通訊速率“9600bps”,報文格式:“8”位數(shù)據(jù)位,,“1”位停止位,,“Even”偶校驗,數(shù)據(jù)流控制選擇“None”,。
5) End Delimiter欄中設(shè)置接收報文結(jié)束方式“After character delay time elapses”利用兩個報文的間隔時間來判斷報文是否結(jié)束,,并設(shè)置字符延時時間“4ms”(該時間可使用默認(rèn)設(shè)置,默認(rèn)設(shè)置時間隨通訊速率不同時間也不同),。
 化工儀器網(wǎng)
化工儀器網(wǎng)