 化工儀器網(wǎng)
化工儀器網(wǎng)










詳細(xì)介紹
西門子6SL3210-1SE11-3UA0
6SL3210-1SE11-3UA0 SINAMICS S120 變頻器 功率模塊 PM340 輸入:380-480V 三相交流,,50/60Hz 輸出:3 相交流 1.3A(0.37kW) 結(jié)構(gòu)形式:塊大小 組件 FSA 內(nèi)部風(fēng)冷 |

西門子科學(xué)家正在參與一項(xiàng)新的科研項(xiàng)目,,該項(xiàng)目可就大數(shù)據(jù)的多種商業(yè)應(yīng)用方式進(jìn)行分析。歐盟的BYTE項(xiàng)目旨在制定一份路線圖,,為實(shí)現(xiàn)在2020年以前提高歐洲在大數(shù)據(jù)市場(chǎng)所占份額提供行動(dòng)方案,。BYTE將重點(diǎn)開發(fā)政治措施和技術(shù)措施,這些舉措既能大程度利用大數(shù)據(jù)的優(yōu)勢(shì),,又可以小化隱私等方面的不利影響,。歐盟的BIG項(xiàng)目為大數(shù)據(jù)應(yīng)用找到了業(yè)務(wù)模式和相應(yīng)技術(shù),BYTE項(xiàng)目是在BIG項(xiàng)目基礎(chǔ)上的進(jìn)一步推進(jìn),。除西門子以外,,此項(xiàng)目還聚集了其他十家來自工業(yè)和科研領(lǐng)域的合作伙伴。
海量數(shù)據(jù)的智能分析以及更重要的對(duì)分散信息的融合蘊(yùn)含著巨大潛力,。舉例而言,,工業(yè)企業(yè)已經(jīng)在利用大數(shù)據(jù)技術(shù)來尋找節(jié)能空間,。當(dāng)涉及多個(gè)數(shù)據(jù)源時(shí),大數(shù)據(jù)分析的難度會(huì)更大,,例如,,要研究特定地區(qū)的工廠和家庭用戶的能源消耗數(shù)據(jù)就比較困難。分析此類信息可以得出工廠的生產(chǎn)情況或個(gè)人的使用行為,,因而必須對(duì)這類信息的使用加以精確和安全的規(guī)范,。由多數(shù)據(jù)源融合而來的數(shù)據(jù)量越大,數(shù)據(jù)使用所帶來的正面或負(fù)面的影響就越多樣化,。BYTE團(tuán)隊(duì)中聚集了自然科學(xué),、工程、計(jì)算機(jī)編程,、法律,、社會(huì)學(xué)和經(jīng)濟(jì)學(xué)領(lǐng)域的專家,專家們通過開展各種案例研究以分析大數(shù)據(jù)的方方面面,。
西門子中央研究院的科學(xué)家們?cè)贐YTE項(xiàng)目中對(duì)智能城市展開了案例研究,。來自城市、工廠和發(fā)電廠等特殊環(huán)境的信息,,經(jīng)過特定的處理方式實(shí)現(xiàn)關(guān)聯(lián),,西門子稱其為智能數(shù)據(jù)(Smart Data),。例如,,手機(jī)可以提供用戶行動(dòng)軌跡的匿名數(shù)據(jù),汽車可以生成交通路況的數(shù)據(jù),,智能電表提供的數(shù)據(jù)可用于預(yù)測(cè)未來的能源需求,。城市可以利用此類數(shù)據(jù)疏導(dǎo)交通,改善碳足跡,,又不侵犯市民的隱私,。為實(shí)現(xiàn)這一愿景,需進(jìn)一步制定相關(guān)法律并開發(fā)數(shù)據(jù)保護(hù)技術(shù),。
西門子研究人員與歐洲城市攜手合作,,對(duì)能源與交通交集領(lǐng)域的大數(shù)據(jù)應(yīng)用展開研究。他們走訪了能源供應(yīng)商,、市政當(dāng)局和公共運(yùn)輸公司的專家,,努力推進(jìn)各個(gè)方面的研究。西門子的一些業(yè)務(wù)部門已經(jīng)在開發(fā)智能城市解決方案,,包括智能電表,、樓宇和能源管理系統(tǒng)以及電動(dòng)交通基礎(chǔ)設(shè)施。此外,,西門子中央研究院于2013年夏季在維也納啟動(dòng)了“Aspern智能城市”(Aspern Smart City)研究項(xiàng)目,,目前該項(xiàng)目正在推進(jìn)過程中,。
問題
當(dāng)MM4系列變頻器出現(xiàn)F0001故障時(shí)該如何解決?
F0001
變頻器過電流,變頻器輸出電流超過大允許電流,,常見故障可分為以下三類,,電機(jī)故障、負(fù)載問題以及變頻器故障,。
常見原因
- 電機(jī)問題
l 電機(jī)繞組相間或?qū)Φ囟搪?/p>
l 電機(jī)電纜有接地故障
l 電機(jī)電纜長(zhǎng)度超過了大允許的電纜長(zhǎng)度
l 電機(jī)電纜接線存在接觸不良的情況
- 負(fù)載問題
l 負(fù)載電機(jī)遇到?jīng)_擊,,或機(jī)械結(jié)構(gòu)出現(xiàn)“卡住”現(xiàn)象,引起電機(jī)電流突然增加
l 變頻器輸出頻率超過電機(jī)額定頻率,,電機(jī)處于弱磁狀態(tài),,負(fù)載波動(dòng)引起過電流
l 變頻器斜坡上升下降時(shí)間與負(fù)載特性不匹配,如加,、減速時(shí)間太短
l 電動(dòng)機(jī)功率與變頻器的功率不相匹配,,小變頻器拖動(dòng)大電機(jī)(小馬拉大車的情況)
l 變頻器運(yùn)行過程當(dāng)中,使用接觸器投入或切除電機(jī)
l PID控制,,反饋信號(hào)受到干擾波動(dòng)較大,,PI參數(shù)不合適
l 啟動(dòng)正在旋轉(zhuǎn)的電機(jī)
l 矢量控制時(shí)電機(jī)參數(shù)或速度環(huán)參數(shù)不準(zhǔn)確
l 勢(shì)能負(fù)載(例如起重機(jī))啟動(dòng)時(shí)過電流,電機(jī)抱閘控制不合理,,或啟動(dòng)力矩不夠
- 變頻器問題
l 變頻器I/O板接觸不良
l 變頻器內(nèi)部器件短路
l 變頻器電流檢測(cè)元件故障
常見處理辦法
處理MM4系列變頻器F0001故障,,應(yīng)首先明確變頻器在何種工況下發(fā)生F0001故障,再按照故障的可能性逐條原因排查,。常見工況:
1. 上電不運(yùn)行就發(fā)生F0001故障,,并且不能復(fù)位故障
2. 上電沒有F0001故障,一啟動(dòng)馬上報(bào)F0001故障,,可以復(fù)位但啟動(dòng)馬上又出現(xiàn)F0001
3. 正常運(yùn)行過程中偶爾報(bào)F0001故障
對(duì)于第1種情況,,由變頻器問題引起的可能性較大,可嘗試拆除控制接線,、電機(jī)接線,,只保留變頻器供電電源和地線,嘗試能否復(fù)位故障,,如果不能復(fù)位,,變頻器可能損壞,請(qǐng)聯(lián)系維修部門,。如果故障能復(fù)位,,檢查變頻器外部接線是否存在問題。
對(duì)于第2種情況,,由電機(jī)問題引起的可能性較大,,可嘗試拆除控制接線、電機(jī)接線,,只保留變頻器供電電源和地線,,嘗試使用BOP面板空載啟動(dòng)變頻器(變頻器控制方式需要設(shè)置為V/F方式),,如果變頻器不出現(xiàn)F0001故障,請(qǐng)著重檢查電機(jī)和電機(jī)電纜絕緣情況,、電機(jī)電纜是否超長(zhǎng),、以及電機(jī)電纜是否存在接觸不良的情況,或更換電機(jī)進(jìn)行測(cè)試,。如果變頻器仍然出現(xiàn)F0001故障,,變頻器可能損壞,請(qǐng)聯(lián)系維修部門,。
對(duì)于第3種情況,,由負(fù)載問題引起的可能性較大,請(qǐng)按照“常見故障原因”中負(fù)載問題逐條分析,。
注意:該故障無法屏蔽,。
案例集
序號(hào) | 故障現(xiàn)象描述 | 可能的故障原因及處理措施 |
1 | 變頻器上電未啟動(dòng)就報(bào)F0001故障,并且無法復(fù)位,,拆除控制接線,、電機(jī)接線,只保留變頻器供電電源和地線,,仍然不能復(fù)位故障 | 原因:變頻器損壞
措施:請(qǐng)聯(lián)系維修部門 |
2 | 變頻器上電正常,,一起動(dòng)電機(jī)不轉(zhuǎn)馬上報(bào)F0001故障,故障可以復(fù)位,,復(fù)位后再啟動(dòng)仍然出現(xiàn)F0001,,拆除電機(jī)電纜空載起動(dòng)變頻器,不再出現(xiàn)F0001 | 原因:可能由于電機(jī)或電機(jī)電纜絕緣不良導(dǎo)致
措施:檢查電機(jī)絕緣
|
3 | MM430帶風(fēng)機(jī)負(fù)載,,啟動(dòng)前風(fēng)機(jī)葉片無規(guī)則旋轉(zhuǎn),,啟動(dòng)馬上報(bào)F0001故障 | 原因:?jiǎn)?dòng)正在旋轉(zhuǎn)的電機(jī)
措施:激活直流制動(dòng),或者采用機(jī)械方式,,鎖定電機(jī)軸 |
4 | MM430帶風(fēng)機(jī)負(fù)載,啟動(dòng)前風(fēng)機(jī)被風(fēng)吹著一直在旋轉(zhuǎn),,啟動(dòng)馬上報(bào)F0001故障 | 原因:?jiǎn)?dòng)正在旋轉(zhuǎn)的電機(jī)
措施:激活捕捉再啟動(dòng) |
5 | 風(fēng)機(jī)負(fù)載,,電網(wǎng)閃動(dòng)時(shí), 變頻器激活了自動(dòng)再啟動(dòng)功能,,自動(dòng)復(fù)位欠壓故障后再啟動(dòng),,偶爾出現(xiàn)F0001故障 | 原因:風(fēng)機(jī)為大慣量負(fù)載,變頻器F0001故障后停機(jī),,但風(fēng)機(jī)由于慣性仍然在旋轉(zhuǎn),,再啟動(dòng)時(shí)變頻器啟動(dòng)正在旋轉(zhuǎn)的電機(jī)導(dǎo)致過流
措施:激活捕捉再啟動(dòng)功能 |
6 | 起重機(jī)主鉤,平地起動(dòng)報(bào)F0001故障 | 原因:電機(jī)速度環(huán)比例積分參數(shù)可能不合適
措施:優(yōu)化電機(jī)參數(shù) |
7 | 起重機(jī)主鉤,,懸停起動(dòng)報(bào)F0001故障 | 原因:電機(jī)抱閘控制不合理,,或啟動(dòng)力矩不夠
措施:優(yōu)化抱閘控制邏輯,,提高低頻扭矩 |
8 | 起重機(jī)大車行走機(jī)構(gòu),啟動(dòng)F0001 | 原因:通常大車行走機(jī)構(gòu)為一帶多形式,,單臺(tái)電機(jī)有問題,, 容易導(dǎo)致變頻器過流
措施:檢查外圍機(jī)械, 檢查電機(jī)匝間絕緣 |
9 | 430變頻器用于恒壓供水,,水泵切換時(shí)出現(xiàn)F0001故障 | 原因:變頻器運(yùn)行過程當(dāng)中,,使用接觸器投入或切除電機(jī)
措施:必須封鎖變頻器脈沖輸出才能進(jìn)行接觸器的投切 |
10 | 440驅(qū)動(dòng)擠出機(jī),運(yùn)行過程出現(xiàn)F0001 | 原因:是否投料太多,,出現(xiàn)卡住現(xiàn)象
措施:考慮特殊機(jī)械的選型余量 |
11 | 430驅(qū)動(dòng)風(fēng)機(jī),、水泵超50Hz運(yùn)行F0001 | 原因:變頻器超頻運(yùn)行 ,風(fēng)機(jī)泵類負(fù)載導(dǎo)致電機(jī)軸功率按照3次方關(guān)系加大
措施:限制頻率上限,,避免變頻器超速運(yùn)行 |
12 | 440驅(qū)動(dòng) 離心機(jī),,離心機(jī)全速運(yùn)行后,增加物料,,變頻器F0001 | 原因:突然增加負(fù)載,,導(dǎo)致變頻器過流
措施:需要緩慢增加負(fù)載 |
13 | 430恒壓供水系統(tǒng),偶爾F0001 | 原因:模擬量反饋信號(hào)受干擾波動(dòng)較大或PI參數(shù)設(shè)置不合適
措施:排出干擾增加模擬量濾波時(shí)間,,調(diào)整PI參數(shù) |
14 | 440變頻器輸出電纜超長(zhǎng),,偶爾F0001 | 原因:長(zhǎng)電纜導(dǎo)致分布電容加大,導(dǎo)致變頻器峰值電流加大
措施:加裝輸出電抗器,、縮短電纜長(zhǎng)度 |
15 | 440驅(qū)動(dòng)帶抱閘的電機(jī),,抱閘由PLC控制,停車時(shí)F0001 | 原因:電機(jī)減速過程突加負(fù)載引起過流
措施:使用變頻器抱閘控制邏輯或停機(jī)后延時(shí)關(guān)閉抱閘 |
16 | MM440驅(qū)動(dòng)移動(dòng)小車,,偶爾F0001 | 原因:小車震動(dòng)導(dǎo)致電機(jī)電纜接觸不良引起過電流
措施:禁錮接線端子 |
注意
以上內(nèi)容僅作為故障報(bào)警排查的指導(dǎo),,不具有性,導(dǎo)致變頻器故障報(bào)警的原因很多,,情況也較復(fù)雜,,本文只是對(duì)常見的故障報(bào)警原因和處理方法進(jìn)行說明,供參考,。
1. 概述
西門子驅(qū)動(dòng)裝置(SIMOVERT MasterDrives VC,,MicroMaster 4 以及SIMOREG DC Master)除了具有與驅(qū)動(dòng)基本應(yīng)用有關(guān)的功能外,還具有強(qiáng)大的通訊功能,。驅(qū)動(dòng)通訊可以分為三種方式:
? PROFIBUS DP協(xié)議
? USS協(xié)議
? SIMOLINK協(xié)議(一般用來代替Peer to Peer協(xié)議,,實(shí)現(xiàn)從站到從站的通訊)
PROFIBUS DP和USS協(xié)議屬于主/從通訊,需要有PLC作為主站,,驅(qū)動(dòng)裝置作為從站,。
USS協(xié)議的主要優(yōu)點(diǎn)是,其接口集成在基本裝置中,,不需要額外費(fèi)用,;主要缺點(diǎn)是通訊速度慢,,只有基本通訊功能(PKW+PZD),多31個(gè)從站,。
PROFIBUS DP協(xié)議的主要優(yōu)點(diǎn)是,,通訊速度快,除了基本功能之外還有一些附加功能(例如:非循環(huán)通訊,,交叉通訊),,站點(diǎn)數(shù)更多;主要缺點(diǎn)是需要另外購買作為選件的通訊模板(例如:CBP2或PROFIBUS模板),。
SIMOLINK協(xié)議(代替Peer to Peer協(xié)議)主要用來實(shí)現(xiàn)驅(qū)動(dòng)裝置與驅(qū)動(dòng)裝置之間的通訊,。SIMOLINK協(xié)議也可以是主/從通訊,主站是S7-400(FM458+EXM448)或SIMADYN D,。
這里我們主要介紹S7 PLC與驅(qū)動(dòng)裝置采用PROFIBUS DP協(xié)議進(jìn)行通訊,。
采用PROFIBUS DP協(xié)議通訊時(shí),既可以利用STEP 7本身提供的功能,,也可以使用TIA軟件Drive ES,。
本文檔只介紹STEP 7本身提供的功能。有關(guān)Drive ES的功能將根據(jù)需要在以后的文檔中再做介紹,。
(關(guān)于 DriveES,,可以參加西門子自動(dòng)化與驅(qū)動(dòng)培訓(xùn)中心的培訓(xùn)課程D2403)
2. *條件西門子6SL3210-1SE11-3UA0
下面以S7-300 PLC與MasterDrives CUVC變頻器的通訊為例:
主站:S7-300 CPU315-2DP可編程序控制器
從站:MasterDrives CUVC變頻器 + CBP2 通訊模板
編程裝置:PC + STEP 7 V5.4 + MPI接口(MPI Adapter 或CP5611卡)
裝有STEP 7 V5.4 的PC機(jī)用于S7 CPU315-2DP的硬件組態(tài)與編程,通過MPI電纜與CPU315-2DP的MPI接口連接,,用于硬件組態(tài)數(shù)據(jù)及程序的下載,。CPU315-2DP的DP接口通過PROBIBUS 電纜與CUVC 變頻器的CBP2 上的DP 接口連接,用于S7-300 與變頻器的通訊,。
網(wǎng)絡(luò)連接如圖1 所示,。

圖1:PC機(jī)、CPU315-2DP 與驅(qū)動(dòng)裝置的連接
3. 硬件組態(tài)
3.1. 新建項(xiàng)目
在SIMATIC Manager 中新建一個(gè)項(xiàng)目,,名稱為Drives_Comm,。如圖2 所示。
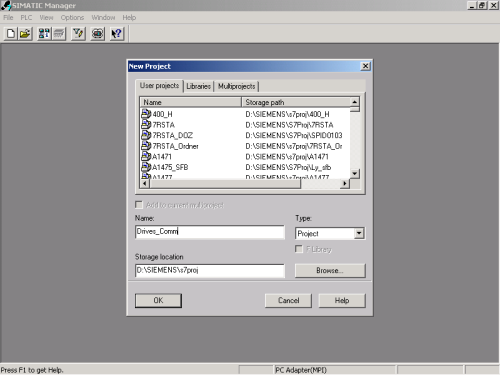
圖2:新建項(xiàng)目,,名稱為Drives_Comm
3.2. 插入一個(gè)S7-300 主站
在項(xiàng)目名稱Drives_Comm 下插入SIMATIC 300 Station,,如圖3 所示。
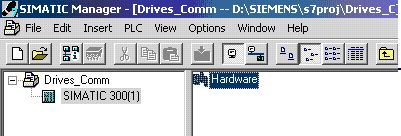
圖3:在項(xiàng)目下插入一個(gè)S7-300 站
接下來對(duì)該站進(jìn)行硬件組態(tài):從硬件組態(tài)目錄中依次插入機(jī)架,、電源、CPU,,設(shè)置CPU上PROFIBUS DP 接口的網(wǎng)絡(luò)參數(shù)(可采用缺省設(shè)置,,即:地址2,高地址126,,波特率1.5 Mbps,,協(xié)議DP),。如圖4 所示。
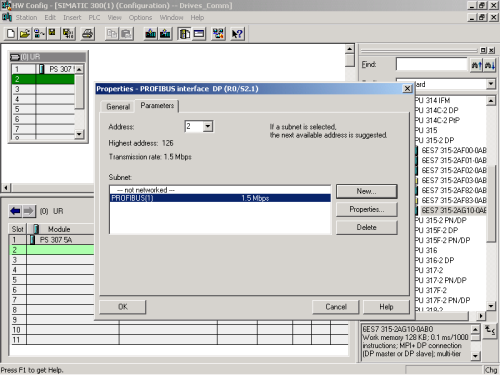
圖4:設(shè)置CPU 上PROFIBUS DP 接口的參數(shù)
按OK 鍵確認(rèn)后得到主站的組態(tài)結(jié)果,,如圖5所示,。
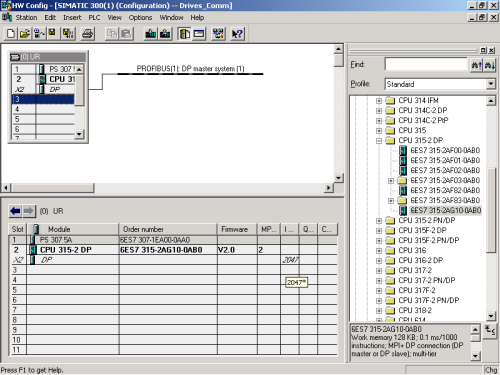
圖5:主站的組態(tài)
3.3 插入一個(gè)MASTERDRIVE 從站
在PROFIBUS(1): DP master system (1) 總線上掛上MasterDrives 從站。
從站路徑為:PROFIBUS DP >
SIMOVERT >
MASTERDRIVES/DC MASTER CBPx 或
MASTERDRIVES/DC MASTER CBP2 DPV1
MASTERDRIVES/DC MASTER CBPx 與MASTERDRIVES/DC MASTER CBP2 DPV1 的區(qū)別是,,前者只能按照PPO 類型選擇報(bào)文結(jié)構(gòu)(即CBP 功能:循環(huán)通訊),,后者還能選擇更多的報(bào)文結(jié)構(gòu),以配合CBP2 的一些擴(kuò)展功能(DPV1功能),。
(關(guān)于CBP2 模板的報(bào)文結(jié)構(gòu)參見下面第7 部分)
(關(guān)于MM4 PROFIBUS 模板的報(bào)文結(jié)構(gòu)參見下面第8 部分)
選擇MASTERDRIVES/DC MASTER CBP2 DPV1 作為從站,,地址設(shè)成3。如圖6 所示,。
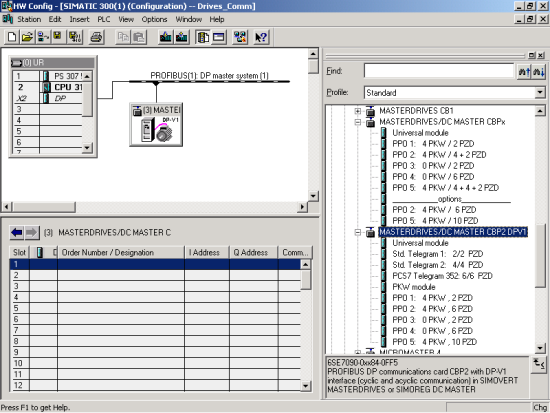
圖6:選擇MASTERDRIVES/DC MASTER CBP2 DPV1 作為3 號(hào)站
3.4. 在從站中插入“模板”
在驅(qū)動(dòng)裝置從站中插入類似于ET 200M 從站中的模板,,以確定報(bào)文結(jié)構(gòu)。
將右邊窗口硬件目錄中MASTERDRIVES/DC MASTER CBP2 DPV1 下面的 PPO 3: 0PKW, 2PZD插入左下窗口中的*行(Slot 1),。該選項(xiàng)共占兩行,。意思是:PPO類型3,即:0個(gè)字參數(shù)數(shù)據(jù)(又叫PKW),,2 個(gè)字過程數(shù)據(jù)(又叫PZD),。參數(shù)數(shù)據(jù)用于PLC 讀/寫變頻器的參數(shù),過程數(shù)據(jù)用于PLC 控制和監(jiān)視生產(chǎn)過程,。0 個(gè)字參數(shù)數(shù)據(jù)表示PLC 不能讀/寫驅(qū)動(dòng)裝置的參數(shù),,參數(shù)數(shù)據(jù)也不占用S7 的外設(shè)地址;2 個(gè)字過程數(shù)據(jù)表示PLC 和驅(qū)動(dòng)裝置交換2 個(gè)字過程數(shù)據(jù),,各占用S7-300 PLC 四個(gè)字節(jié)的外設(shè)地址,。地址范圍是輸入字節(jié)256 - 259,輸出字節(jié)256 -259,。如圖7 所示,。
通常S7 傳送到驅(qū)動(dòng)裝置的第1 個(gè)字是控制字,第2 個(gè)字是頻率設(shè)定值,;驅(qū)動(dòng)裝置傳送到S7的第1 個(gè)字是狀態(tài)字,,第2 個(gè)字是頻率實(shí)際值。這是簡(jiǎn)單的應(yīng)用,。
(關(guān)于CBP2 模板的其他選項(xiàng)的含義參見下面第7 部分)
(關(guān)于MM4 PROFIBUS 模板選項(xiàng)的含義參見下面第8 部分)

圖7:驅(qū)動(dòng)裝置的輸入/輸出地址
3.5 查看從站中“模板”的屬性
雙擊左下窗口中的第二行(Slot 2),,打開其屬性。如圖8 所示,。
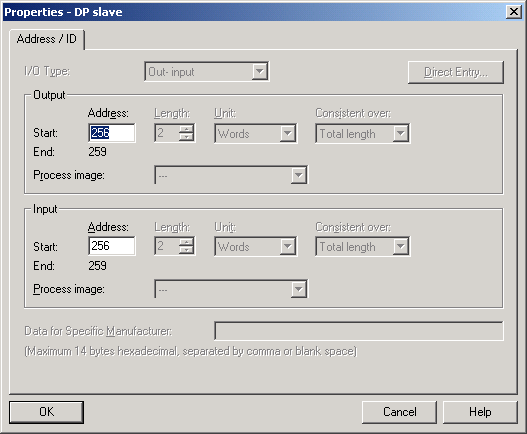
圖8:驅(qū)動(dòng)裝置的輸入/輸出地址的屬性
屬性中給出驅(qū)動(dòng)裝置占用S7-300 PLC 外設(shè)地址的情況,,包括:輸出/輸入地址,長(zhǎng)度,單位,,連續(xù)性范圍,。這里除了地址之外,其他屬性都是由PPO3 決定的,,只能讀,,不能改寫。
| 提示: | ||||||
| 長(zhǎng)度: | MASTERDRIVES/DC MASTER: | 大 16 個(gè)字 | ||||
| MICROMASTER 420: | 大 4 個(gè)字 | |||||
| MICROMASTER 430/440: | 大 8 個(gè)字 | |||||
| 單位: | Words(字) | |||||
| 連續(xù)性范圍: | Unit | 以字為單位傳送 | ||||
| Total length | 所有字一起傳送 | |||||
當(dāng)字長(zhǎng)不大于 2 或選擇“以字為單位傳送”時(shí):用 MOVE 指令(L/T 指令)編程
當(dāng)字長(zhǎng)大于 2 且選擇“所有字一起傳送”時(shí):用 SFC14/15 編程
4. 編程
根據(jù)前面的組態(tài),,由于輸入/輸出各占四個(gè)字節(jié),,可以使用兩次MOVE 指令(L/T 指令)。由于程序簡(jiǎn)單,,程序可以直接編寫在OB1 中,。數(shù)據(jù)從MB0 - MB3(即:MW0和MW2)寫入驅(qū)動(dòng)裝置,從驅(qū)動(dòng)裝置讀回的數(shù)據(jù)放入MB4 - MB7(即:MW4和MW6),。如圖9所示,。
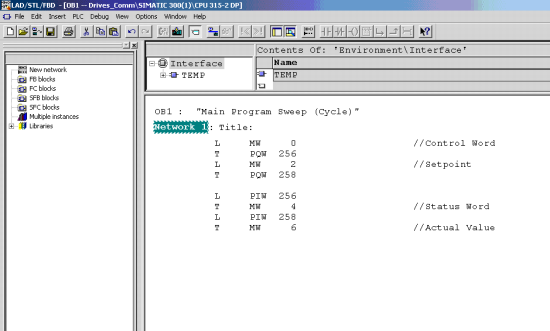
圖9:PLC程序
傳送到驅(qū)動(dòng)裝置的第1 個(gè)字(MW0)是控制字(控制指令):
當(dāng) MW0 = 0000 0100 0000 0000 B = 0400 H 時(shí),驅(qū)動(dòng)裝置處于運(yùn)行準(zhǔn)備狀態(tài),;
當(dāng) MW0 = 0000 0100 0000 0001 B = 0401 H 時(shí),,驅(qū)動(dòng)裝置進(jìn)入運(yùn)行狀態(tài)1)
1) 相應(yīng)于第5部分參數(shù)設(shè)置,PLC 只控制驅(qū)動(dòng)裝置起/停,。若要傳送所有指令應(yīng)設(shè)置:
MW0 = 1001 1100 0111 1110 B(9C7EH)<-> 運(yùn)行準(zhǔn)備
MW0 = 1001 1100 0111 1111 B(9C7FH)<-> 運(yùn)行
同時(shí)設(shè)置:P555~P575 = 3101~3115
傳送到驅(qū)動(dòng)裝置的第2 個(gè)字(MW2)是頻率設(shè)定值:
當(dāng)MW2 = 0100 0000 0000 0000 B = 4000 H= 16384 D 時(shí),,相當(dāng)于50Hz。
5. 參數(shù)設(shè)置
在驅(qū)動(dòng)裝置側(cè),,驅(qū)動(dòng)裝置應(yīng)處于可以運(yùn)行的狀態(tài),。為了實(shí)現(xiàn)與PLC 之間的通訊,以及從PLC 接收起/停指令和設(shè)定值,,向PLC 傳送狀態(tài)字(驅(qū)動(dòng)裝置狀態(tài))和實(shí)際值,,應(yīng)如下更改參數(shù):
| P918.01 = 3(缺省設(shè)置) | 驅(qū)動(dòng)裝置地址(即:站號(hào)) | ||||
| P554.01 = 3100 | 起/停指令(ON/OFF1) | ||||
| P443.01 = 3002 | 頻率設(shè)定值(Setpoint) | ||||
| P734.01 = 32 | 狀態(tài)字1(Status Word1) | ||||
| P734.02 = 148 | 頻率實(shí)際值(Actual Value) | ||||
參數(shù)設(shè)置可以通過操作面板PMU,也可以通過DriveMonitor 軟件進(jìn)行,。
6. 測(cè)試
啟動(dòng)STEP 7的Monitor/Modify Variables 功能,,填寫變量。如圖10 所示,。
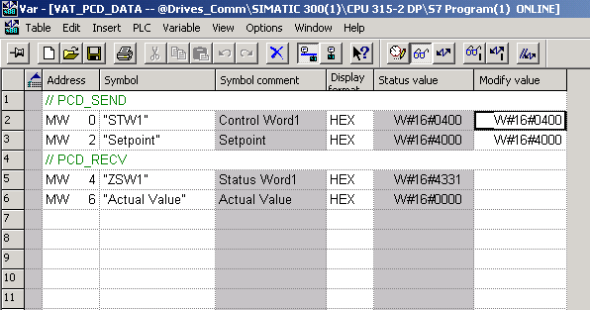
圖10:用監(jiān)視和修改變量功能控制驅(qū)動(dòng)裝置起動(dòng)和調(diào)速
當(dāng)控制字(Control Word1)為W#16#0400 時(shí),,驅(qū)動(dòng)裝置應(yīng)顯示O009,表示運(yùn)行準(zhǔn)備狀態(tài),。將控制字從W#16#0400 改成W#16#0401 時(shí),,驅(qū)動(dòng)裝置起動(dòng)。除了狀態(tài)字(Status Word1)會(huì)發(fā)生變化外,,速度實(shí)際值(Actual Value)也會(huì)逐漸上升,,上升速度取決于參數(shù)P462.01 的數(shù)值,,后達(dá)到W#16#4000(50Hz),。狀態(tài)字的含義如圖11 所示,。其中Bit 2 表示運(yùn)行狀態(tài)。將控制字改回W#16#0400 時(shí),,驅(qū)動(dòng)裝置首先減速,,減速時(shí)間取決于P464.01 的數(shù)值,然后停止運(yùn)行,。

 化工儀器網(wǎng)
化工儀器網(wǎng)