 化工儀器網(wǎng)
化工儀器網(wǎng)










詳細(xì)介紹
西門子IPC347D工業(yè)計(jì)算機(jī) 西門子IPC347D工業(yè)計(jì)算機(jī)
我公司經(jīng)營(yíng)西門子*現(xiàn)貨PLC;S7-200S7-300 S7-400 S7-1200 觸摸屏,,變頻器,,6FC,6SNS120 V10 V60 V80伺服數(shù)控備件:*電機(jī)(1LA7,、1LG4,、1LA9、1LE1),,國(guó)產(chǎn)電機(jī)(1LG0,,1LE0)大型電機(jī)(1LA8,1LA4,,1PQ8)伺服電機(jī)(1PH,,1PM,1FT,,1FK,,1FS)西門子保內(nèi)*產(chǎn)品‘質(zhì)保一年。一年內(nèi)因產(chǎn)品質(zhì)量問(wèn)題免費(fèi)更換新產(chǎn)品,;不收取任何費(fèi),。咨詢。
追求,,追求精確
要通過(guò)“嚴(yán)格”的檢驗(yàn)程序,,以可編程控制器(PLC)產(chǎn)品為例,在整個(gè)生產(chǎn)過(guò)程中針對(duì)該類產(chǎn)品的質(zhì)量檢測(cè)節(jié)點(diǎn)就超過(guò)20個(gè),。視覺(jué)檢測(cè)是數(shù)字化工廠*的質(zhì)量檢測(cè)方法,,相機(jī)會(huì)拍下產(chǎn)品的圖像與Teamcenter數(shù)據(jù)平臺(tái)中的正確圖像作比對(duì),一點(diǎn)小小的瑕疵都逃不過(guò)SIMATIC IT品質(zhì)管理模塊的“眼睛”,。對(duì)比傳統(tǒng)制造企業(yè)的人工抽檢,,這顯然要可靠又快速得多。”
1. 項(xiàng)目基本信息
Basic Project Information
汽車總裝物流自動(dòng)化系統(tǒng),系統(tǒng)中使用了西門子的CPU319F,、ET200s,、G120、Comfort Panel,。升降機(jī)設(shè)備使用的變頻器是西門子G120:CU250S-2PN (6SL3246-0BA22-1FA0),,PM240 45kw (6SL3224-0BE33-7UA0)
下圖為總裝廠內(nèi)飾線物流設(shè)備和系統(tǒng)網(wǎng)絡(luò)結(jié)構(gòu)圖:
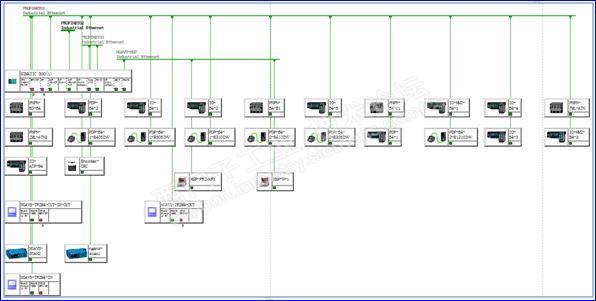
圖1系統(tǒng)網(wǎng)絡(luò)結(jié)構(gòu)圖
2. 問(wèn)題描述
Problem description
用戶反映有以下幾個(gè)問(wèn)題:
問(wèn)題一:總裝廠內(nèi)飾4線的升降機(jī)有時(shí)會(huì)出帶車身下降無(wú)法快速減速的現(xiàn)象,升降機(jī)會(huì)快速下滑,,類似于失速,,目前通過(guò)降低升降機(jī)的速度可以暫時(shí)使用。
問(wèn)題二:升降機(jī)下到位停止時(shí),,車盤抖動(dòng)劇烈,。
升降機(jī)的功能是將車身從二層下放到一層(圖2),升降機(jī)下降時(shí),,變頻器高輸出頻率運(yùn)行在50Hz,,遇到減速開(kāi)關(guān)時(shí)輸出頻率設(shè)為8Hz,遇到到位開(kāi)關(guān)時(shí),,變頻器給停車命令,,同時(shí)抱閘將電機(jī)抱死。
現(xiàn)場(chǎng)觀察發(fā)現(xiàn):經(jīng)常出問(wèn)題的升降機(jī)在空車盤運(yùn)行時(shí),,不會(huì)出現(xiàn)用戶描述的問(wèn)題一現(xiàn)象,,下降到位停止時(shí),車盤上下晃動(dòng)較大,。當(dāng)車盤帶車身下降時(shí),,遇到減速開(kāi)關(guān)不能快速減速到8Hz,車盤直接撞到硬限位開(kāi)關(guān),,電機(jī)抱閘將電機(jī)抱死,。在此過(guò)程中,變頻器不報(bào)警,。
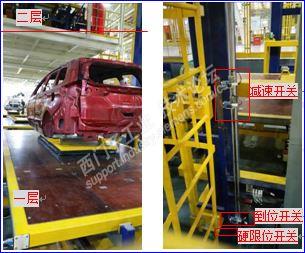
圖2 升降機(jī)設(shè)備
3. 問(wèn)題分析
Problem Analysis
問(wèn)題一:升降機(jī)不能快速減速,,且變頻器不報(bào)錯(cuò)
1) 升降機(jī)下放重物,電機(jī)工作在發(fā)電狀態(tài),,變頻器應(yīng)禁用Vdmax控制器,,啟用能耗制動(dòng),利用變頻器集成的制動(dòng)單元和外部制動(dòng)電阻消耗能量,。檢查變頻器接線,,尤其是制動(dòng)電阻的接線是否正確。檢查變頻器參數(shù)設(shè)置P1240/P1280,,是否禁用Vdmax控制器。檢查P219制動(dòng)功率設(shè)置是否正確。
2) 考慮制動(dòng)電阻的制動(dòng)功率是否合適,。
3) 實(shí)際速度與設(shè)定速度不*時(shí),,變頻器默認(rèn)設(shè)置可以報(bào)A7903,且作為狀態(tài)字Bit8通過(guò)通訊報(bào)文返回給PLC,。需檢查報(bào)警記錄,,并檢查G120的Speed Message設(shè)置。
問(wèn)題二:升降機(jī)下放到位停止時(shí)抖動(dòng)
1) 考慮是否是變頻器控制性能問(wèn)題導(dǎo)致抖動(dòng),。需要測(cè)試變頻器從50Hz輸出減速到0Hz輸出(ON命令保持),,觀察升降機(jī)的穩(wěn)定性。裝置是否動(dòng)態(tài)優(yōu)化,。
2) 考慮抱閘邏輯及機(jī)械影響,。需要測(cè)試在變頻器零速輸出時(shí),先抱閘再給停車命令,。
4. 問(wèn)題處理步驟
Problem Solving Steps
1)檢查變頻器接線和制動(dòng)電阻接線,,正確。變頻器參數(shù)設(shè)置P1240=0,、P1280=0,,Vdmax控制器已經(jīng)禁用。
2)變頻器以50Hz設(shè)定值運(yùn)行時(shí),,其運(yùn)行曲線見(jiàn)圖3,。當(dāng)速度設(shè)定值(紅線)迅速下降時(shí),編碼器反饋的速度實(shí)際值(黃線)緩慢下降,,直到碰到硬限位開(kāi)關(guān),,電機(jī)抱閘抱緊,實(shí)際速度才變?yōu)?,。圖3中,,設(shè)備在加速和減速轉(zhuǎn)折點(diǎn)處的功率(淺藍(lán)線)大,但在減速過(guò)程中一直被限制在-13.75kw左右,,且減速轉(zhuǎn)折點(diǎn)處的輸出轉(zhuǎn)矩(深黃線)只有-90Nm左右,。

圖3 閉環(huán)矢量控制 輸出頻率50Hz P1531=-13.75kw
采用矢量閉環(huán)控制方式時(shí),其轉(zhuǎn)矩輸出除了受轉(zhuǎn)矩上下限影響以外,,還受電流限制值和功率限制值影響(圖4),。檢查P1530和P1531(圖5),P1531=-13.75kw,。因此可以判斷:在下降過(guò)程中,,變頻器受功率限制值的影響,轉(zhuǎn)矩輸出被限制,。
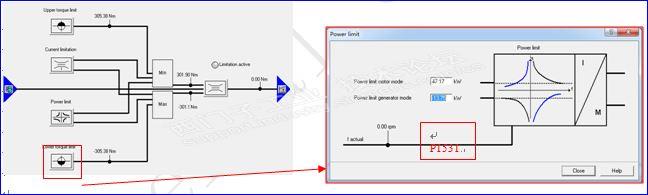
圖4 轉(zhuǎn)矩限制 圖5功率限制
3)用戶提到的在降低輸出頻率(40Hz)的情況下,,不會(huì)出現(xiàn)速度減不下來(lái)的問(wèn)題,。圖6為閉環(huán)矢量控制,設(shè)定頻率為40Hz,,P1531=-13.75kw時(shí)的運(yùn)行曲線,,功率(淺藍(lán)線)仍被限制在-13.75kw左右,當(dāng)設(shè)定速度(紅線)下降時(shí),,實(shí)際速度(黃線)其實(shí)并不能很好的跟隨減速,,主要原因還是功率限制影響了轉(zhuǎn)矩輸出,但速度降低以后剛好輸出轉(zhuǎn)矩可以滿足負(fù)載要求,,因此速度再次受控,,不會(huì)表現(xiàn)出明顯的速度不受控現(xiàn)象。

圖6閉環(huán)矢量控制 頻率輸出40Hz P1531=-13.75kw
4)圖7為V/F控制方式下,,輸出頻率50Hz,,P1531=-13.75kw時(shí)的運(yùn)行曲線。此時(shí)的功率(淺藍(lán)線)不受P1531的限制,,在減速轉(zhuǎn)折點(diǎn)處功率達(dá)到-22kw左右,,轉(zhuǎn)矩輸出(深黃線)達(dá)到-155Nm左右,因此,,在閉環(huán)矢量控制時(shí),,應(yīng)設(shè)置P219>22kw(P1531會(huì)自動(dòng)設(shè)置為-P219)。
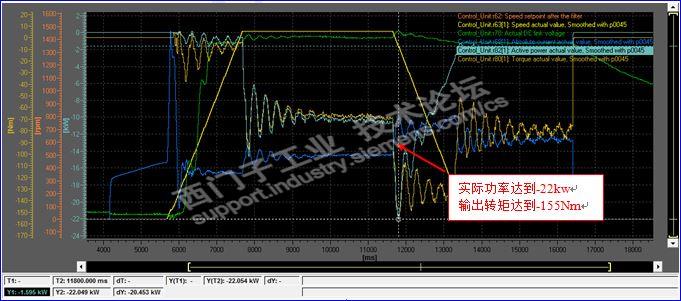
圖7 V/F控制方式 輸出頻率50Hz P1531=-13.75kw
5)為電機(jī)做靜態(tài)優(yōu)化和帶編碼器的動(dòng)態(tài)優(yōu)化,,由于升降機(jī)的驅(qū)動(dòng)電機(jī)是一用一備,,因此可以切換到備用電機(jī)上做動(dòng)態(tài)優(yōu)化,并將原來(lái)電機(jī)的編碼器線安裝到備用電機(jī)上,,注意在Scout中設(shè)置P410=1,,將編碼器方向取反。做動(dòng)態(tài)優(yōu)化時(shí),,需要強(qiáng)制抱閘打開(kāi),。優(yōu)化完畢后將電機(jī)和編碼器接線恢復(fù),并設(shè)置P410=0,,P219=25kw,,參數(shù)上傳保存,并copy RAM to ROM,。圖8為修改參數(shù)后變頻器的運(yùn)行曲線,,在減速轉(zhuǎn)折點(diǎn)附近的功率(淺藍(lán)線)達(dá)到-20kw,轉(zhuǎn)矩輸出達(dá)到-150Nm左右,。

圖8 閉環(huán)矢量控制 輸出頻率50Hz P1531=-25kw
6)為了進(jìn)一步確認(rèn)P1531對(duì)閉環(huán)矢量控制下轉(zhuǎn)矩輸出的影響,,設(shè)置P1531=-10kw(圖9)。當(dāng)設(shè)定頻率為50Hz時(shí),,功率(淺藍(lán)線)被限制在-10kw,,轉(zhuǎn)矩輸出(深黃線)被限制在-62Nm左右,,電機(jī)失速(實(shí)際速度大于大速度限制值1500rpm),報(bào)故障F7902,,變頻器OFF2停車,,電機(jī)抱閘抱死。因此功率限制值P1530,、P1531的設(shè)置限制了閉環(huán)矢量控制的轉(zhuǎn)矩輸出。
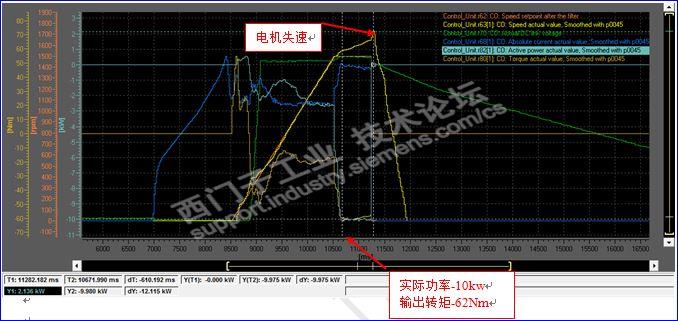 圖9 閉環(huán)矢量控制 輸出頻率50Hz P1531=-10kw
圖9 閉環(huán)矢量控制 輸出頻率50Hz P1531=-10kw
7)在Scout中在線查看G120的Alarm History,,當(dāng)出現(xiàn)實(shí)際速度與設(shè)定速度相差很大的情況時(shí),,變頻器報(bào)警A7903,但在變頻器屏幕上沒(méi)能及時(shí)看到此報(bào)警,,因?yàn)槌霈F(xiàn)的時(shí)間太短(小于1秒),,但是報(bào)警點(diǎn)已經(jīng)通過(guò)通訊報(bào)文狀態(tài)字1的bit8返回給了PLC(圖10),用戶并沒(méi)有使用此位參與控制抱閘,。用戶希望此報(bào)警直接變成故障輸出,。設(shè)置參數(shù)P2106=2197.7,利用此點(diǎn)激活外部故障1(F7860),,變頻器停止輸出,,電機(jī)抱閘抱死。圖11為設(shè)置外部故障參數(shù)前變頻器運(yùn)行曲線,,圖12為設(shè)置外部故障后的運(yùn)行曲線,。
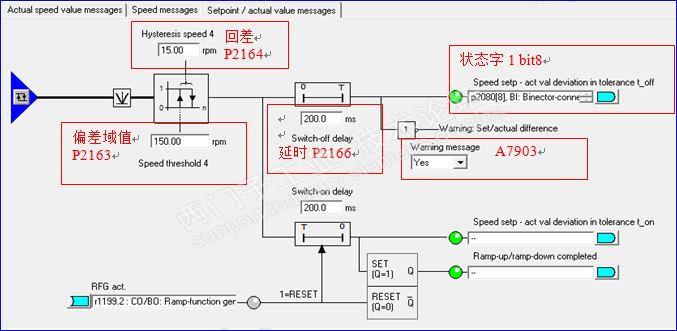
圖10速度監(jiān)控
圖11實(shí)際速度(黃線)與設(shè)定速度(紅線)差值大于P2163+P2164(150rpm+15rpm),超過(guò)P2166(200ms),,抱閘無(wú)動(dòng)作,。
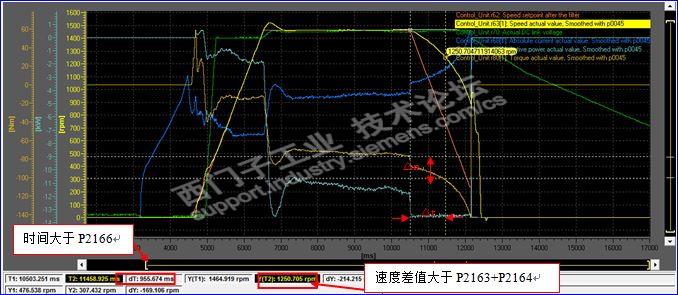
圖11 設(shè)置P2106=2197.7之前
圖12實(shí)際速度(黃線)與設(shè)定速度(紅線)差值大于P2163+P2164(150rpm+15rpm),超過(guò)P2166(200ms),,變頻器停止輸出,,電機(jī)抱閘抱死。
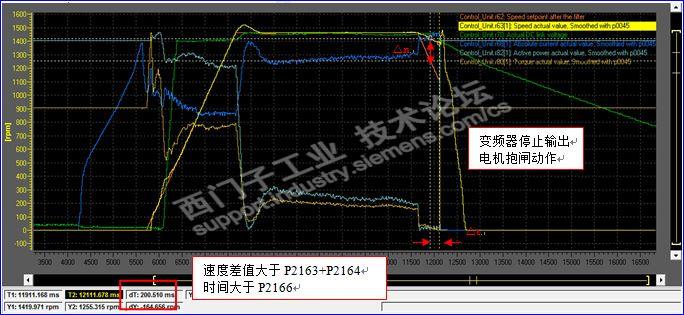
圖12 設(shè)置P2106=2197.7之后
8)升降機(jī)下降到位時(shí),,車盤上下抖動(dòng),。首先,測(cè)試在變頻器輸出從50Hz減速到0Hz時(shí)的穩(wěn)定性,。當(dāng)車盤遇到減速開(kāi)關(guān)時(shí),,控制其直接減速到0Hz,On命令始終接通,,圖13為測(cè)試曲線,,圖中可以看出設(shè)定速度(紅線)從高速減到0rpm時(shí),實(shí)際速度(黃線)只在接近0rpm時(shí)經(jīng)過(guò)了一個(gè)波谷(偏差<20rpm)就穩(wěn)定在0rpm了,,考慮到減速箱的減速比為1475/41,,這個(gè)波動(dòng)幾乎無(wú)法察覺(jué),。變頻器在0rpm時(shí)輸出轉(zhuǎn)矩(紫線)為110Nm左右,可以將車盤穩(wěn)穩(wěn)懸停,。因此車盤抖動(dòng)不是變頻器閉環(huán)矢量控制參數(shù)的問(wèn)題,。
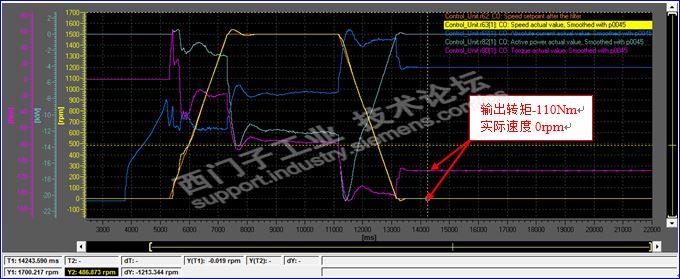
圖13閉環(huán)矢量控制 0rpm輸出測(cè)試
9)用戶的抱閘是由PLC輸出直接控制的,當(dāng)變頻器ON命令保持,,0rpm輸出時(shí),,強(qiáng)制抱閘輸出抱緊電機(jī)時(shí),車盤不晃動(dòng),,說(shuō)明抖動(dòng)不是機(jī)械上的問(wèn)題,。需要用戶查看抱閘控制邏輯,并注意抱閘動(dòng)作所需時(shí)間,。
10)檢查用戶關(guān)于變頻器控制部分的程序FB101(圖14),。當(dāng)變頻器既沒(méi)有正轉(zhuǎn)命令又沒(méi)有反轉(zhuǎn)命令時(shí),PLC發(fā)給變頻器的控制字為16#476,,也就是說(shuō)當(dāng)車盤下降到位或上升到位時(shí),,變頻器接收到的控制字為16#476(2#0000 0010 0111 0110),即PLC控制變頻器OFF1停車(bit0)并脈沖封鎖(bit3),。因此,,在車盤下到位停止時(shí),變頻器得到脈沖封鎖命令,,變頻沒(méi)有轉(zhuǎn)矩輸出,。變頻器停止時(shí)速度設(shè)定值(紅線)直接變?yōu)?,沒(méi)有按P1121(2秒)斜坡下降,,轉(zhuǎn)矩輸出(深黃線)直接變?yōu)?,。車盤相當(dāng)于自由停車,此時(shí)抱閘剛剛開(kāi)始動(dòng)作還沒(méi)有抱緊,,因此車盤下降速度(黃線)突然增大,,而后抱閘抱緊,車盤停止,,實(shí)際速度變?yōu)?rpm,。
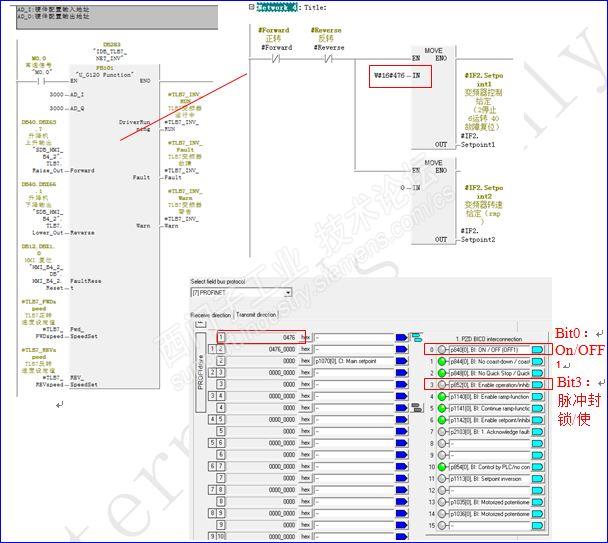
圖14 PLC控制邏輯
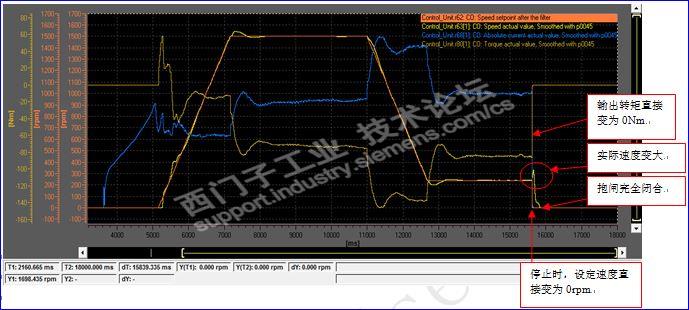
圖15抱閘曲線
用戶需要修改此段程序,將停止命令改為16#47E,,再根據(jù)抱閘動(dòng)作所需時(shí)間,,修改抱閘控制邏輯。
5. 處理結(jié)果
Final Result
問(wèn)題一:升降機(jī)下降無(wú)法快速停車,,且變頻器不報(bào)錯(cuò)問(wèn)題已經(jīng)通過(guò)測(cè)試1-7找到根源并解決,。問(wèn)題關(guān)鍵點(diǎn)是:
1)P219參數(shù)設(shè)置,該參數(shù)直接影響P1531,,設(shè)置P219=25kw(P1531=-25kw),。
2)矢量控制方式下,,變頻器需要靜態(tài)優(yōu)化和動(dòng)態(tài)優(yōu)化。
3)P2106=2197.7,,實(shí)際速度與設(shè)定速度偏差過(guò)大時(shí),,激活外部故障1(F7860)。
問(wèn)題二:車盤下降到位時(shí)上下抖動(dòng)問(wèn)題已經(jīng)通過(guò)測(cè)試8-10找到,,需要用戶修改停車方式,,理清抱閘邏輯。問(wèn)題關(guān)鍵點(diǎn)是:
1)升降機(jī)正常停止時(shí),,PLC不能給變頻器脈沖封鎖命令,,會(huì)直接導(dǎo)致變頻器沒(méi)有轉(zhuǎn)矩輸出,相當(dāng)于自由停車,,在抱閘*抱緊之前,車盤必然會(huì)下滑,。
2)抱閘動(dòng)作時(shí)間與OFF1停車命令的配合邏輯需要用戶自己理清,。用戶反饋:將變頻器停止命令修改為16#047E,并使用G120的brake control抱閘控制點(diǎn)(變頻器通訊狀態(tài)字1 bit12)控制抱閘動(dòng)作,,車盤到位時(shí)不再抖動(dòng),。
2017年5月,次接觸西門子,。聽(tīng)起來(lái)好笑,,隨便叫個(gè)人也會(huì)S7-200是吧。以前只是大概知道,,從來(lái)沒(méi)用過(guò)西門子產(chǎn)品,,仿西門子的國(guó)內(nèi)產(chǎn)品倒是擺弄過(guò)一次。因?yàn)榻o美國(guó)人做產(chǎn)品,,所以一直用AB的PLC,。結(jié)果去年開(kāi)始要進(jìn)軍歐洲,歐洲客戶的反映是他們習(xí)慣用西門子的產(chǎn)品,。只好還是學(xué)了,。
次就是從 S7-1200 + TP1200 Comfort開(kāi)始的。從淘寶買來(lái)東西,,接好線,,開(kāi)始學(xué)習(xí),翻寫(xiě)之前的各種程序,,研究西門子的*用法,,還算順利。零零散散用了3個(gè)月時(shí)間,,個(gè)入門階段算是過(guò)去了,,工作的各種應(yīng)用,,都能實(shí)現(xiàn)了。有不少地方,,因?yàn)椴┩镜奶攸c(diǎn),,學(xué)了一些新的考慮方式。我向來(lái)對(duì)HMI動(dòng)畫(huà)效果是隔外重視的,,絕不屈就,。所以又自學(xué)了用CorelDrawX7制作矢量圖片。有了這個(gè)就不用受到Wincc的局限了,。PLC和HMI的各種存儲(chǔ)卡買了,,也都玩一遍。



期間發(fā)現(xiàn),,西門子支持中心的應(yīng)用范例,,特別好,不僅可以學(xué)習(xí)如何具體應(yīng)用,,尤其西門子程序員的手法風(fēng)格頗有啟發(fā),。手冊(cè)幫助這些東西是必看的,但都是比較基礎(chǔ)的東西,。
去年底偶然大家提起,,以后有可能用伺服電機(jī)在我們的產(chǎn)品中,以前我沒(méi)用過(guò)伺服,。只好繼續(xù)學(xué)習(xí),,選擇了V90,看了一些手冊(cè)和范例之后,,在淘寶訂貨,。
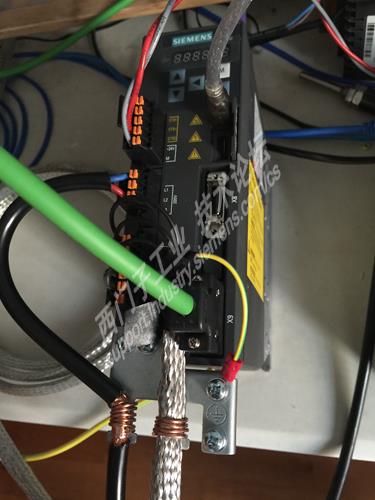



伺服驅(qū)動(dòng)器和電纜先到的,伺服電機(jī)和濾波器還得等兩月,。我對(duì)屏蔽和接地的事情有點(diǎn)擔(dān)憂,,臥室里沒(méi)有地線,就買了一捆6平方地線,,從門口總閘盒跑兩路地線到臥室,。
賣我電纜的公司提供的電機(jī)動(dòng)力電纜都是國(guó)內(nèi)自己組裝的,沒(méi)有屏蔽層,,只好買編織屏蔽套給電纜套上,。編碼器電纜還好是原裝產(chǎn)品有屏蔽。手頭的網(wǎng)線都是普通的,,就買來(lái)屏蔽6類網(wǎng)線和屏蔽水晶頭,,還有電源線都要是屏蔽的。還有雙面導(dǎo)電的銅箔膠帶。一樣一樣買吧,,各種都得嘗試,。我是打算把手冊(cè)中提到的和我知道的所有屏蔽和接地手段全都動(dòng)手做一遍
看了EPOS的簡(jiǎn)單應(yīng)用,還好不難,。就等著電機(jī)來(lái)貨上手調(diào)試了,。
-------------------------------2018-02-07-----------------------------
在淘寶上買了個(gè)示波器,想看看EMI,。
關(guān)于花錢的問(wèn)題,。只要行動(dòng),事情就簡(jiǎn)單了,,花多了也就習(xí)慣了,。而且這些器件都不白瞎,如果需要,,都可以在工程用上,。每個(gè)人都會(huì)受限于自己的資源平臺(tái)約束?;ㄥX提高效率,,可以節(jié)約不少歲月的浪費(fèi),減少猶豫不決,。隨著年紀(jì)和經(jīng)歷的變化,如果自己不要求著,,很多可能也就擦肩而過(guò)了,。所以這些體現(xiàn)在瑣碎細(xì)節(jié)中的日積月累的選擇,造成的差別其實(shí)蠻大的,。


----------------------------2018-04-09-----------------------------
今天供貨商總算通知我伺服電機(jī)到貨了,,剛結(jié)了尾款。整整11個(gè)星期,,德國(guó)訂貨,,尼瑪,都靠干了,。一個(gè)星期后去美國(guó),,一去就是兩個(gè)月,等回來(lái)再繼續(xù)折騰了,。訂的是值編碼器的小功率伺服電機(jī),,無(wú)抱閘,帶鍵,。還有個(gè)濾波器,。


接好線,打開(kāi)24DCV和220ACV電源,啟動(dòng)有一小會(huì)兒,。打開(kāi)V-Assistant,,編碼器自動(dòng)識(shí)別,使能,,點(diǎn)動(dòng)正反轉(zhuǎn),。還行,轉(zhuǎn)得挺順溜,。集中看資料是2個(gè)月前了,,還得重新看一遍。好在EPOS的控制界面并不復(fù)雜,,編程不是大問(wèn)題,。至于電機(jī)本身的工藝應(yīng)用,這個(gè)應(yīng)該需要很多時(shí)間磨合,,很多參數(shù),,各種負(fù)載情形,要用到得心應(yīng)手,,這才剛剛開(kāi)始,。
CPU
6ES7211-0AA23-0B0 CPU221 DC/DC/DC,6輸入/4輸出
6ES7211-0BA23-0B0 CPU221 繼電器輸出,6輸入/4輸出
6ES7212-1AB23-0B8 CPU222 DC/DC/DC,8輸入/6輸出
6ES7212-1BB23-0B8 CPU222 繼電器輸出,8輸入/6輸出
6ES7214-1AD23-0B8 CPU224 DC/DC/DC,14輸入/10輸出
6ES7214-1BD23-0B8 CPU224 繼電器輸出,14輸入/10輸出
6ES7214-2AD23-0B8 CPU224XP DC/DC/DC,14DI/10DO,2AI/1AO
6ES7214-2BD23-0B8 CPU224XP 繼電器輸出,14DI/10DO,2AI/1AO
6ES7216-2AD23-0B8 CPU226 DC/DC/DC,24輸入/16輸出
6ES7216-2BD23-0B8 CPU226 繼電器輸出,24輸入/16輸出
擴(kuò)展模塊
6ES7 221-1BH22-0A8 EM221 16入 24VDC,開(kāi)關(guān)量
6ES7 221-1BF22-0A8 EM221 8入 24VDC,,開(kāi)關(guān)量
6ES7 221-1EF22-0A0 EM221 8入 120/230VAC,,開(kāi)關(guān)量
6ES7 222-1BF22-0A8 EM222 8出 24VDC,開(kāi)關(guān)量
6ES7 222-1EF22-0A0 EM222 8出 120V/230VAC,,0.5A 開(kāi)關(guān)量
6ES7 222-1HF22-0A8 EM222 8出 繼電器
6ES7 222-1BD22-0A0 EM222 4出 24VDC 固態(tài)-MOSFET
6ES7 222-1HD22-0A0 EM222 4出 繼電器 干觸點(diǎn)
6ES7 223-1BF22-0A8 EM223 4入/4出 24VDC,,開(kāi)關(guān)量
6ES7 223-1HF22-0A8 EM223 4入 24VDC/4出 繼電器
6ES7 223-1BH22-0A8 EM223 8入/8出 24VDC,開(kāi)關(guān)量
6ES7 223-1PH22-0A8 EM223 8入 24VDC/8出 繼電器
6ES7 223-1BL22-0A8 EM223 16入/16出 24VDC,,開(kāi)關(guān)量
6ES7 223-1PL22-0A8 EM223 16入 24VDC/16出 繼電器
6ES7 223-1BM22-0A8 EM223 32入/32出 24VDC,,開(kāi)關(guān)量
6ES7 223-1PM22-0A8 EM223 32入 24VDC/32出 繼電器
6ES7 231-0HC22-0A8 EM231 4入*12位精度,模擬量
6ES7 231-7PB22-0A8 EM231 2入*熱電阻,,模擬量
6ES7 231-7PD22-0A8 EM231 4入*熱電偶,,模擬量
6ES7 232-0HB22-0A8 EM232 2出*12位精度,模擬量
6ES7 235-0KD22-0A8 EM235 4入/1出*12位精度,,模擬量
6ES7 277-0AA22-0A0 EM277 PROFIBUS-DP接口模塊
6GK7 243-2AX01-0A0 CP243-2 AS-i接口模塊
6ES7 253-1AA22-0A0 EM253 位控模塊
6ES7 241-1AA22-0A0 EM241 調(diào)制解調(diào)器模塊
6GK7 243-1EX00-0E0 CP243-1工業(yè)以太網(wǎng)模塊
6GK7 243-1GX00-0E0 CP243-1IT 工業(yè)以太網(wǎng)模塊

 化工儀器網(wǎng)
化工儀器網(wǎng)