 化工儀器網(wǎng)
化工儀器網(wǎng)










詳細介紹
西門子IPC427D工控機 西門子IPC427D工控機
上海盟疆工業(yè)自動化設(shè)備有限公司在經(jīng)營活動中精益求精,,具備如下業(yè)務(wù)優(yōu)勢:
上海盟疆工業(yè)自動化設(shè)備有限公司*銷售西門子PLC,200,,300,400,,1200,,西門子PLC附件,西門子電機,,西門子人機界面,,西門子變頻器,西門子數(shù)控伺服,,西門子總線電纜現(xiàn)貨供應(yīng),,咨詢系列產(chǎn)品,折扣低,,貨期準時,,并且備有大量庫存. 長期有效
西門子數(shù)控伺服系統(tǒng):802C S、802D SL,、810D DE,、820D SL,、840C CE、840D DE,、840D SL,、840Di SL、S120數(shù) 控 系 統(tǒng),、數(shù) 控 伺 服 驅(qū) 動 模 塊,、控制 模 塊、電 源模 塊,、備 品 備 件 等,。
本公司產(chǎn)品質(zhì)量按西門子原廠質(zhì)量標準,產(chǎn)品質(zhì)保一年,,按西門子原廠包裝標準,,西門子原裝 原裝產(chǎn)品,按廠家執(zhí)行標準,,需方收到貨后七日內(nèi)可提出異議?。?!
我們賣的不是價格,。賣的是誠信賣的是品質(zhì)
問題
當(dāng)V20變頻器出現(xiàn)A0501時該如何解決?
A0501
變頻器輸出電流限幅,當(dāng)變頻器的輸出電流達到r0067參數(shù)的數(shù)值時,,變頻器給出A0501報警,,r0067的大小受P640(電動機過載倍數(shù))、變頻器大輸出電流,、電動機和變頻器熱保護功能影響,。當(dāng)出現(xiàn)A0501報警時,變頻器會啟動大電流控制器并保持或降低輸出頻率來抑制電流繼續(xù)增大,。
常見原因
1.電機負載大,,由負載大導(dǎo)致電機電流較大達到了電流限幅值,變頻器出現(xiàn)A0501
· 電動機過載
· 大慣量負載加速時間太短需要較大啟動轉(zhuǎn)矩的設(shè)備的啟動過程(包括電動機堵轉(zhuǎn))
· PID控制,,反饋信號受到干擾波動較大,,PI參數(shù)不合適
· 啟動正在旋轉(zhuǎn)的電機
2.變頻器過溫
· 變頻器過載(過溫),由變頻器過溫導(dǎo)致變頻器輸出能力下降,。引起A0501
3.電機參數(shù)問題
· 電機參數(shù)不準確
常見處理辦法
1.由電機負載大引起的A0501請檢查以下幾點
· 檢查電動機是否過載,,通過變頻器r0027查看電機當(dāng)前電流是否已經(jīng)超過電機額定電流
· 如果在大慣量負載加速過程中出現(xiàn)A0501,請適當(dāng)延長斜坡上升時間P1120
· 需要較大啟動轉(zhuǎn)矩的重載應(yīng)用時,,啟動出現(xiàn)A0501電機不轉(zhuǎn),,請適當(dāng)增大電壓提升P1310,P 1311,P 1312
· PID控制經(jīng)常出現(xiàn)A0501,請檢查模擬量反饋信號是否受到干擾波動很大,適當(dāng)增大模擬量信號濾波時間,,適當(dāng)調(diào)整PI參數(shù)P2280和P2285
· 如果變頻器啟動本身就在旋轉(zhuǎn)的電機,,啟動時有可能出現(xiàn)A0501,嚴重情況可能導(dǎo)致F0001,,激活捕捉再啟動功能p1200
· 注意:潛水泵、壓縮機,、羅茨風(fēng)機不同于普通的供水泵和離心風(fēng)機,屬于重負載應(yīng)用
2.由變頻器過溫引起的A0501請檢查以下幾點
· 變頻器的輸出電流是否已經(jīng)超過變頻器額定電流
· 變頻器工作環(huán)境溫度是否過高
· 變頻器風(fēng)扇是否工作正常
3.由電機參數(shù)問題引起的A0501
· 檢查設(shè)置的電機銘牌數(shù)據(jù)與電機接線方式(星接/角接)是否*
案例集
序號 | 報警現(xiàn)象描述 | 可能的故障原因及處理措施 |
1
| V20驅(qū)動離心風(fēng)機,,加速過程中出現(xiàn)A0501
| 原因:風(fēng)機為大慣量負載,機械特性決定需要長的加速時間P1120
措施:延長斜坡上升時間 |
2 | 潛水泵(深井泵),,啟動,、加速過程中出現(xiàn)A0501 | 原因:潛水泵并不是普通泵類負載, 類似恒轉(zhuǎn)矩負載,, 啟動轉(zhuǎn)矩要求較大
措施:P1300=0,,適當(dāng)增大電壓提升P1310 |
3 | V20驅(qū)動羅茨風(fēng)機,啟動過程中出現(xiàn)A0501報警,, 頻率不能上升,。 | 原因:潛水泵并不是普通泵類負載, 類似恒轉(zhuǎn)矩負載,, 啟動轉(zhuǎn)矩要求較大
措施:P1300=0,,適當(dāng)增大電壓提升P1310 |
4 | V20變頻器用于恒壓供水,經(jīng)常出現(xiàn)A0501報警 | 原因:模擬量反饋信號受干擾波動較大或PI參數(shù)設(shè)置不合適
措施:排出干擾增加模擬量濾波時間,,調(diào)整PI參數(shù) |
5 | V20驅(qū)動風(fēng)機,、水泵超50Hz運行,出現(xiàn)A0501 | 原因:變頻器超頻運行 ,,風(fēng)機泵類負載導(dǎo)致電機軸功率按照3次方關(guān)系加大,。電機過載。
措施:限制頻率上限避免變頻器超速運行 |
6 | 電動機空載運行報A0501,,檢查電機良好無機械問題 | 原因:電機采用角形接法,,電機參數(shù)按照星形接法輸入
措施:正確設(shè)置電機參數(shù) |
注意
以上內(nèi)容僅作為故障報警排查的指導(dǎo),不具有性,,導(dǎo)致變頻器故障報警的原因很多,,情況也較復(fù)雜,本文只是對常見的故障報警原因和處理方法進行說明,,供參考,。
S7-200支持的通信協(xié)議
表1. S7-200系統(tǒng)支持的通信協(xié)議略表
| 協(xié)議類型 | 端口位置 | 接口類型 | 傳輸介質(zhì) | 通信速率 | 備注 |
|---|---|---|---|---|---|
| PPI | EM241模塊 | RJ11 | 模擬電話 | 33.6Kbits/s | 數(shù)據(jù)傳輸速率 |
CPU口0/1 | DB-9針 | RS-485 | 9.6K,19.2K,187.5K | 主、從站 | |
| MPI | 19.2K,187.5K | 僅從站 | |||
| EM277 | DB-9針 | RS-485 | 19.2K...187.5K...12M | 速率自適應(yīng) 從站 | |
| PROFIBUS-DP | 9.6K,19.2K...187.5K...12M | ||||
| S7協(xié)議 | CP243-1/ CP243-1 IT | RJ45 | 以太網(wǎng) | 10Mbits/s, 100Mbits/s | 自適應(yīng) |
| AS-Interface | CP243-2 | 接線端子 | AS-i網(wǎng)絡(luò) | 5/10ms循環(huán)周期 | 主站 |
| USS | CPU口0 | DB-9針 | RS-485 | 1200bits/s...9.6K...115.2K | 主站 自由口庫指令 |
| Modbus RTU | 主站/從站 自由口庫指令 | ||||
| EM241 | RJ11 | 模擬電話 | 33.6Kbits/s | 數(shù)據(jù)傳輸速率 | |
| 自由口 | CPU口0/1 | DB-9針 | RS-485 | 1200...9.6K...115.2K | |
 S7-200 CPU上的通信口(Port0,,Port1)可以工作在“自由口”模式下,。 所謂自由口就是建立在RS-485半雙工硬件基礎(chǔ)上的串行通信功能,其字節(jié)傳輸格式為:一個起始位、7位或8位數(shù)據(jù),、一個可選的奇偶校驗位,、一個停止位。凡支持此格式的通信對象,,一般都可以與S7-200通信,。在自由口模式下,通信協(xié)議*由通信對象,,或者用戶決定,。
S7-200 CPU上的通信口(Port0,,Port1)可以工作在“自由口”模式下,。 所謂自由口就是建立在RS-485半雙工硬件基礎(chǔ)上的串行通信功能,其字節(jié)傳輸格式為:一個起始位、7位或8位數(shù)據(jù),、一個可選的奇偶校驗位,、一個停止位。凡支持此格式的通信對象,,一般都可以與S7-200通信,。在自由口模式下,通信協(xié)議*由通信對象,,或者用戶決定,。
網(wǎng)絡(luò)通信
一些通信標準只支持一對一的通信方式;另一些支持網(wǎng)絡(luò)通信,。S7-200支持多種網(wǎng)絡(luò)通信方式,。
網(wǎng)絡(luò)通信協(xié)議要比一對一的通信更為復(fù)雜。網(wǎng)絡(luò)通信對網(wǎng)絡(luò)中的設(shè)備也有一定的要求,,通信設(shè)備能否*符合網(wǎng)絡(luò)通信協(xié)議的要求會影響,、制約實現(xiàn)整個網(wǎng)絡(luò)通信的完整功能??疾爝@些網(wǎng)絡(luò)通信協(xié)議的要求,,對于項目的規(guī)劃、設(shè)計,、調(diào)試具有重要的意義,。選用適當(dāng)?shù)脑O(shè)備可以有目的地利用網(wǎng)絡(luò)通信要求的特點,做到經(jīng)濟合理,。
 在用戶的實際工作中,,上述的制約更多地在使用了非西門子的第三方產(chǎn)品時出現(xiàn)。
在用戶的實際工作中,,上述的制約更多地在使用了非西門子的第三方產(chǎn)品時出現(xiàn)。
 S7-200的特點就是支持網(wǎng)絡(luò)通信,。連接到S7-200編程口的設(shè)備都可以認為是連接到了S7-200通信網(wǎng)絡(luò)上,。一個典型的例子是安裝了編程軟件Micro/WIN的計算機,通過編程電纜與CPU通信口相連,,這也可以認為是一個通信網(wǎng)絡(luò),。
S7-200的特點就是支持網(wǎng)絡(luò)通信,。連接到S7-200編程口的設(shè)備都可以認為是連接到了S7-200通信網(wǎng)絡(luò)上,。一個典型的例子是安裝了編程軟件Micro/WIN的計算機,通過編程電纜與CPU通信口相連,,這也可以認為是一個通信網(wǎng)絡(luò),。
通信主站和從站
通信協(xié)議規(guī)定了通信設(shè)備在網(wǎng)絡(luò)中的角色,可分為:
- 通信從站:從站不能主動發(fā)起通信數(shù)據(jù)交換,,只能響應(yīng)主站的訪問,,提供或接受數(shù)據(jù)。從站不能訪問其他從站,。在多數(shù)情況下,,S7-200在通信網(wǎng)絡(luò)中作為從站,響應(yīng)主站設(shè)備的數(shù)據(jù)請求,。
- 通信主站:可以主動發(fā)起數(shù)據(jù)通信,,讀寫其他站點的數(shù)據(jù)。
S7-200 CPU在讀寫其他S7-200 CPU數(shù)據(jù)時(使用PPI協(xié)議)就作為主站(PPI主站也能接受其他主站的數(shù)據(jù)訪問);S7-200通過附加擴展的通信模塊也可以充當(dāng)主站,。
安裝編程軟件Micro/WIN的計算機一定是通信主站,;所有的HMI(人機操作界面)也是通信主站;與S7-200通信的S7-300/400往往也作為主站,。
只有一個主站,,其他通信設(shè)備都處于從站通信模式的網(wǎng)絡(luò)就是單主站網(wǎng)絡(luò)。單主站網(wǎng)絡(luò)的例子有:
- 一個S7-200 CPU和Micro/WIN(編程計算機)的通信
- 一個S7-200 CPU和一個HMI(如TD200)的通信
- 多個CPU聯(lián)網(wǎng)(但它們都處于PPI從站模式時),,與Micro/WIN的通信
- 多個CPU聯(lián)網(wǎng),,網(wǎng)絡(luò)上只有一個HMI(如TP170B等)
- 一個CPU使用USS協(xié)議與一個或多個西門子驅(qū)動裝置通信
- 一個Modbus RTU主站與從站的通信
一個通信網(wǎng)絡(luò)中,如果有多個通信主站存在,,就稱為多主站網(wǎng)絡(luò)。屬于多主站網(wǎng)絡(luò)的情況有:
- 一個S7-200 CPU連接一個HMI,,同時需要Micro/WIN的編程通信
- S7-200 CPU聯(lián)網(wǎng),,有CPU做PPI主站訪問其他CPU的數(shù)據(jù),同時需要Micro/WIN編程,、監(jiān)視
- CPU聯(lián)網(wǎng),,有兩個以上的CPU做PPI通信主站
- 一個S7-200 CPU連接多個HMI
- 聯(lián)網(wǎng)的多個CPU,連接多個HMI
- 上述情況的組合
單主站和多主站網(wǎng)絡(luò)的狀態(tài)并不總是不變的,。例如一個僅包括一個CPU和一個TD200的單主站網(wǎng)絡(luò),,如果要與Micro/WIN進行編程通信,它就變成了多主站網(wǎng)絡(luò),。
并不是所有的設(shè)備都支持多主站網(wǎng)絡(luò)通信,!在多主站網(wǎng)絡(luò)中,主站要輪流控制網(wǎng)絡(luò)上的通信,,這就要求它們有交換令牌的能力,。不是所有的設(shè)備都有這個能力
S7-200 CPU使用自由口通信模式時,既可以做主站,,又可以做從站,。如S7-200用USS協(xié)議控制西門子驅(qū)動裝置時是主站;使用Modbus RTU從站指令庫時它就是從站,。這說明所謂主,、從是由通信協(xié)議決定的,用戶在編制通信協(xié)議時自己定義各通信設(shè)備在通信活動中的角色,。
服務(wù)器和客戶端
服務(wù)器(Server)與客戶端(Client)的關(guān)系有些像從站與主站的關(guān)系,。服務(wù)器總是等待客戶端發(fā)起數(shù)據(jù)訪問。這個概念常常在以太網(wǎng)通信中使用,。
一個通信對象是服務(wù)器還是客戶端取決于它們在通信活動中的具體作用,。例如,CP243-1以太網(wǎng)模塊既可以配置為服務(wù)器等待客戶端來訪問,也可以配置為客戶端訪問其他服務(wù)器,。CP243-1作為服務(wù)器時,,運行在計算機上的PC Access軟件作為客戶端通過CP243-1訪問CPU的數(shù)據(jù);而PC Access軟件本身是OPC Server,,OPC Client軟件(如支持OPC的HMI軟件)可以訪問它,。
CP243-1/CP243-1 IT與S7-300/400的以太網(wǎng)模塊一樣,既可以做服務(wù)器,,也可以做客戶端,;S7-200的OPC Server——PC Access與CP243-1連接時是客戶端,同時對上位的監(jiān)控軟件是服務(wù)器,。
PPI, MPI和PROFIBUS
PPI,,MPI和PROFIBUS都是基于OSI(開放系統(tǒng)互聯(lián))的七層網(wǎng)絡(luò)結(jié)構(gòu)模型,符合歐洲標準EN50170所定義的PROFIBUS標準,,基于令牌的的網(wǎng)絡(luò)通信協(xié)議,。這些協(xié)議是非同步的(串行的)基于字符的通信協(xié)議,字符格式包括一個起始位,、8個數(shù)據(jù)位,、一個偶校驗位和一個停止位。其通信幀包括特定的起始和結(jié)束字符,、源和目的站的地址,、幀長度和數(shù)據(jù)校驗和。
在波特率*,、各站地址不同的情況下,,PPI,MPI和PROFIBUS可以同時在一個網(wǎng)絡(luò)上運行,,并且互不干擾,。
這就是說如果一個網(wǎng)絡(luò)上有S7-300、S7-200,,S7-300之間可以通過MPI或PROFIBUS通信,,而在同時在同一個網(wǎng)絡(luò)上的TP170 micro觸摸屏可以與一個S7-200 CPU通信。
CPU224 XP 高速I/O
S7-200 CPU支持6路高速數(shù)字量輸入(CPU224/226)和兩路高速數(shù)字量輸出(用于PTO/PWM),。
新產(chǎn)品CPU224 XP高速輸入中的兩路支持更加高的速度,。用作單相脈沖輸入時,可以達到200KHz,;用作雙相90°正交脈沖輸入時,,速度可達100KHz。
CPU224 XP的兩路高速數(shù)字量輸出速率可以達到100KHz,。

圖1. CPU224 XP數(shù)字量接線
圖中:
- 高速輸出點Q0.0和Q0.1與Q0.2 - Q0.4成組支持5 - 24VDC電壓輸出
- 特高速輸入點I0.3/I0.4/I0.5支持5 - 24VDC電壓的源型或漏型輸入,;同組其他輸入點電壓可以仍然是24VDC,,單要求兩者的電源的公共端在1M處連接
CPU224 XP的高速數(shù)字量輸入
除了其他高速輸入端子外,CPU224 XP*的高速輸入端子為I0.3,、I0.4,、I0.5。
具體位置如圖1所示,。
這些特高速輸入端可用作高速計數(shù)器輸入端,,如表1所示:
表1. CPU224 XP高速輸入端子與計數(shù)器分配
| 模式 | 描述 | 輸入點 | |||
|---|---|---|---|---|---|
| HSCO | I0.0 | I0.1 | I0.2 | ||
| HSC1 | I0.6 | I0.7 | I1.0 | I1.1 | |
| HSC2 | I1.2 | I1.3 | I1.4 | I1.5 | |
| HSC3 | I0.1 | ||||
| HSC4 | I0.3 | I0.4 | I0.5 | ||
| HSC5 | I0.4 | ||||
| 0 | 帶有內(nèi)部方向控制的單相計數(shù)器 | 時鐘 | |||
| 1 | 時鐘 | 復(fù)位 | |||
| 2 | 時鐘 | 復(fù)位 | 啟動 | ||
| 3 | 帶有外部方向控制的單相計數(shù)器 | 時鐘 | 方向 | ||
| 4 | 時鐘 | 方向 | 復(fù)位 | ||
| 5 | 時鐘 | 方向 | 復(fù)位 | 啟動 | |
| 6 | 帶有增減計數(shù)時鐘的雙相計數(shù)器 | 增時鐘 | 減時鐘 | ||
| 7 | 增時鐘 | 減時鐘 | 復(fù)位 | ||
| 8 | 增時鐘 | 減時鐘 | 復(fù)位 | 啟動 | |
| 9 | A/B相正交計數(shù)器 | 時鐘A | 時鐘B | ||
| 10 | 時鐘A | 時鐘B | 復(fù)位 | ||
| 11 | 時鐘A | 時鐘B | 復(fù)位 | 啟動 | |
根據(jù)上表可以看出:
- 要達到單相200KHz高速脈沖輸入,可以使用HSC4和HSC5,,分別輸入到I0.3,、I0.4
- 要實現(xiàn)雙相90°正交高速脈沖輸入,可以使用HSC4,;此時HSC5因為I0.4被HSC4占用而不能使用
- HSC4可以工作在模式0,、1、3,、4,、6、7,、9,、10
- HSC5可以工作在模式0
支持特高速輸入的I0.3,、I0.4,、I0.5可以接受5 - 24VDC信號;它們既可以用于高速脈沖輸入,,也可以用于普通輸入信號,。它們與本組輸入點(I0.0 - I0.7)一起,
CPU
6ES7312-1AE13-0AB0 CPU312,,32K內(nèi)存 MPI協(xié)議
6ES7312-5BE03-0AB0 CPU312C,,32K內(nèi)存 10DI/6DO
6ES7313-5BF03-0AB0 CPU313C,64K內(nèi)存 24DI/16DO / 4AI/2AO
6ES7313-6BF03-0AB0 CPU313C-2PTP,,64K內(nèi)存 16DI/16DO
6ES7313-6CF03-0AB0 CPU313C-2DP,,64K內(nèi)存 16DI/16DO
6ES7314-1AG13-0AB0 CPU314,96K內(nèi)存
6ES7314-6BG03-0AB0 CPU314C-2PTP 96K內(nèi)存 24DI/16DO / 4AI/2AO
6ES7314-6CG03-0AB0 CPU314C-2DP 96K內(nèi)存 24DI/16DO / 4AI/2AO
6ES7315-2AG10-0AB0 CPU315-2DP, 128K內(nèi)存
6ES7315-2EH13-0AB0 CPU315-2 PN/DP, 256K內(nèi)存
6ES7317-2AJ10-0AB0 CPU317-2DP,512K內(nèi)存
6ES7317-2EK13-0AB0 CPU317-2 PN/DP,1MB內(nèi)存
6ES7318-3EL00-0AB0 CPU319-3 PN/DP,1.4M內(nèi)存
內(nèi)存卡
6ES7 953-8LF20-0AA0 SIMATIC Micro內(nèi)存卡 64kByte(MMC)
6ES7 953-8LG11-0AA0 SIMATIC Micro內(nèi)存卡128KByte(MMC)
6ES7 953-8LJ20-0AA0 SIMATIC Micro內(nèi)存卡512KByte(MMC)
6ES7 953-8LL20-0AA0 SIMATIC Micro內(nèi)存卡2MByte(MMC)
6ES7 953-8LM20-0AA0 SIMATIC Micro內(nèi)存卡4MByte(MMC)
6ES7 953-8LP20-0AA0 SIMATIC Micro內(nèi)存卡8MByte(MMC)
開關(guān)量模板
6ES7 321-1BH02-0AA0 開入模塊(16點,24VDC)
6ES7 321-1BH10-0AA0 開入模塊(16點,,24VDC)
6ES7 321-1BH50-0AA0 開入模塊(16點,,24VDC,源輸入)
6ES7 321-1BL00-0AA0 開入模塊(32點,,24VDC)
6ES7 321-7BH01-0AB0 開入模塊(16點,,24VDC,診斷能力)
6ES7 321-1EL00-0AA0 開入模塊(32點,,120VAC)
6ES7 321-1FF01-0AA0 開入模塊(8點,,120/230VAC)
6ES7 321-1FF10-0AA0 開入模塊(8點,,120/230VAC)與公共電位單獨連接
6ES7 321-1FH00-0AA0 開入模塊(16點,120/230VAC)
6ES7 321-1CH00-0AA0 開入模塊(16點,,24/48VDC)
6ES7 321-1CH20-0AA0 開入模塊(16點,,48/125VDC)
6ES7 322-1BH01-0AA0 開出模塊(16點,24VDC)
6ES7 322-1BH10-0AA0 開出模塊(16點,,24VDC)高速
6ES7 322-1CF00-0AA0 開出模塊(8點,,48-125VDC)
6ES7 322-8BF00-0AB0 開出模塊(8點,24VDC)診斷能力
6ES7 322-5GH00-0AB0 開出模塊(16點,,24VDC,,獨立接點,故障保護)
6ES7 322-1BL00-0AA0 開出模塊(32點,,24VDC)
6ES7 322-1FL00-0AA0 開出模塊(32點,,120VAC/230VAC)
6ES7 322-1BF01-0AA0 開出模塊(8點,24VDC,,2A)
6ES7 322-1FF01-0AA0 開出模塊(8點,,120V/230VAC)
6ES7 322-5FF00-0AB0 開出模塊(8點,120V/230VAC,,獨立接點)
6ES7 322-1HF01-0AA0 開出模塊(8點,繼電器,2A)
6ES7 322-1HF10-0AA0 開出模塊(8點,繼電器,5A,,獨立接點)
6ES7 322-1HH01-0AA0 開出模塊(16點,繼電器)
6ES7 322-5HF00-0AB0 開出模塊(8點,繼電器,5A,故障保護)
6ES7 322-1FH00-0AA0 開出模塊(16點,,120V/230VAC)
6ES7 323-1BH01-0AA0 8點輸入,,24VDC;8點輸出,,24VDC模塊
6ES7 323-1BL00-0AA0 16點輸入,,24VDC;16點輸出,,24VDC模塊
模擬量模板
6ES7 331-7KF02-0AB0 模擬量輸入模塊(8路,,多種信號)
6ES7 331-7KB02-0AB0 模擬量輸入模塊(2路,多種信號)
6ES7 331-7NF00-0AB0 模擬量輸入模塊(8路,,15位精度)
6ES7 331-7NF10-0AB0 模擬量輸入模塊(8路,,15位精度)4通道模式
6ES7 331-7HF01-0AB0 模擬量輸入模塊(8路,14位精度,,快速)
6ES7 331-1KF01-0AB0 模擬量輸入模塊(8路, 13位精度)
6ES7 331-7PF01-0AB0 8路模擬量輸入,16位,熱電阻
6ES7 331-7PF11-0AB0 8路模擬量輸入,16位,熱電偶
6ES7 332-5HD01-0AB0 模擬量輸出模塊(4路)
6ES7 332-5HB01-0AB0 模擬輸出模塊(2路)
6ES7 332-5HF00-0AB0 模擬輸出模塊(8路)
6ES7 332-7ND02-0AB0 模擬量輸出模塊(4路,,15位精度)
6ES7 334-0KE00-0AB0 模擬量輸入(4路RTD)/模擬量輸出(2路)
6ES7 334-0CE01-0AA0 模擬量輸入(4路)/模擬量輸出(2路)
附件
6ES7 365-0BA01-0AA0 IM365接口模塊
6ES7 360-3AA01-0AA0 IM360接口模塊
6ES7 361-3CA01-0AA0 IM361接口模塊
6ES7 368-3BB01-0AA0 連接電纜 (1米)
6ES7 368-3BC51-0AA0 連接電纜 (2.5米)
6ES7 368-3BF01-0AA0 連接電纜 (5米)
6ES7 368-3CB01-0AA0 連接電纜 (10米)
6ES7 390-1AE80-0AA0 導(dǎo)軌(480mm)
6ES7 390-1AF30-0AA0 導(dǎo)軌(530mm)
6ES7 390-1AJ30-0AA0 導(dǎo)軌(830mm)
6ES7 390-1BC00-0AA0 導(dǎo)軌(2000mm)
6ES7 392-1AJ00-0AA0 20針前連接器
6ES7 392-1AM00-0AA0 40針前連接器
6ES7 392-1BM01-0AA0 彈簧行連接器
1. USS通信介紹
1.1. USS協(xié)議特點
USS (Universal Serial Interface, 即通用串行通信接口) 是西門子專為驅(qū)動裝置開發(fā)的通信協(xié)議。USS 協(xié)議的基本特點如下:
? 支持多點通信(因而可以應(yīng)用在 RS 485 等網(wǎng)絡(luò)上)
? 采用單主站的“主-從”訪問機制
? 每個網(wǎng)絡(luò)上多可以有 32 個節(jié)點(多 31 個從站)
? 簡單可靠的報文格式,,使數(shù)據(jù)傳輸靈活高效
? 容易實現(xiàn),,成本較低
USS 的工作機制是,通信總是由主站發(fā)起,,USS 主站不斷循環(huán)輪詢各個從站,,從站根據(jù)收到的指令,,決定是否以及如何響應(yīng)。從站永遠不會主動發(fā)送數(shù)據(jù),。從站在以下條件滿足時應(yīng)答:
-- 接收到的主站報文沒有錯誤,,并且
-- 本從站在接收到主站報文中被尋址
上述條件不滿足,或者主站發(fā)出的是廣播報文,,從站不會做任何響應(yīng),。對于主站來說,從站必須在接收到主站報文之后的一定時間內(nèi)發(fā)回響應(yīng),。否則主站將視為出錯,。
USS 的字符傳輸格式符合 UART 規(guī)范,即使用串行異步傳輸方式,。USS 在串行數(shù)據(jù)總線上的字符傳輸幀為 11 位長度,,如表1所示:

表1:USS字符幀
USS 協(xié)議的報文簡潔可靠,高效靈活,。報文由一連串的字符組成,,協(xié)議中定義了它們的特
定功能,表2所示:

表2:USS報文結(jié)構(gòu)
每小格代表一個字符(字節(jié)),。其中:
STX: 起始字符,,總是 02 h
LGE: 報文長度
ADR:從站地址及報文類型
BCC: BCC 校驗符
凈數(shù)據(jù)區(qū)由 PKW 區(qū)和 PZD 區(qū)組成,如表3所示:

表3:USS凈數(shù)據(jù)區(qū)
PKW: 此區(qū)域用于讀寫參數(shù)值,、參數(shù)定義或參數(shù)描述文本,,并可修改和報告參數(shù)的改變 。其中:
- PKE: 參數(shù) ID,。包括代表主站指令和從站響應(yīng)的信息,,以及參數(shù)號等
- IND: 參數(shù)索引,,主要用于與 PKE 配合定位參數(shù)
- PWEm:參數(shù)值數(shù)據(jù)
PZD: 此區(qū)域用于在主站和從站之間傳遞控制和過程數(shù)據(jù),。控制參數(shù)按設(shè)定好的固定格式在主,、從站之間對應(yīng)往返,。如:
- PZD1:主站發(fā)給從站的控制字/從站返回主站的狀態(tài)字
- PZD2: 主站發(fā)給從站的給定/從站返回主站的實際反饋
根據(jù)傳輸?shù)臄?shù)據(jù)類型和驅(qū)動裝置的不同,PKW 和 PZD 區(qū)的數(shù)據(jù)長度都不是固定的,,它們可以靈活改變以適應(yīng)具體的需要,。但是,在用于與控制器通信的自動控制任務(wù)時,,網(wǎng)絡(luò)上的所有節(jié)點都要按相同的設(shè)定工作,,并且在整個工作過程中不能隨意改變。
注意:
對于不同的驅(qū)動裝置和工作模式,,PKW 和 PZD 的長度可以按一定規(guī)律定義,。 一旦確定就不能在運行中隨意改變 ,;
PKW 可以訪問所有對 USS 通信開放的參數(shù);而 PZD 僅能訪問特定的控制和過程數(shù)據(jù),;
PKW 在許多驅(qū)動裝置中是作為后臺任務(wù)處理,,因此 PZD 的實時性要比 PKW 好。
1.2. S7-1200 USS通信簡介
CM 1241 RS485 模塊通過 RS485 端口與MM440進行通信,。 可使用 USS 庫控制MM440和讀/寫MM440參數(shù),。該庫提供 1 個 FB 和 3 個 FC 來支持 USS 協(xié)議。 每個 CM1241 RS485 通信模塊多支持 16 個MM440,。連接到一個 CM 1241 RS485 的所有MM440(多 16 個)是同一 USS 網(wǎng)絡(luò)的一部分,。連接到另一 CM 1241 RS485 的所有MM440是另一 USS 網(wǎng)絡(luò)的一部分。 因為 S7-1200多支持三個 CM 1241 RS485 設(shè)備,,所以用戶多可建立三個 USS 網(wǎng)絡(luò),,每個網(wǎng)絡(luò)多 16 個MM440,總共支持 48 個 USS MM440,。各 USS 網(wǎng)絡(luò)使用各自一的數(shù)據(jù)塊進行管理(使用三個 CM 1241 RS485 設(shè)備建立三個 USS網(wǎng)絡(luò)需要三個數(shù)據(jù)塊),。 同一USS 網(wǎng)絡(luò)相關(guān)的所有指令必須共享該數(shù)據(jù)塊。 這包括用于控制網(wǎng)絡(luò)上所有MM440的 USS_DRV,、USS_PORT,、USS_RPM 和USS_WPM 指令。
2. 硬件需求及接線
2.1. 硬件需求
S7-1200 PLC目前有3種類型的CPU:
1)S7-1211C CPU,。
2)S7-1212C CPU,。
3)S7-1214C CPU。
這三種類型的CPU都可以使用USS通信協(xié)議通過通信模塊CM1241 RS485來實現(xiàn)S7-1200與MM440變頻器的通信,。
本例中使用的PLC硬件為:
1) S7-1214C ( 6ES7 214 -1BE30 -0XB0 )
2) CM1241 RS485 ( 6ES7 241 -1CH30 -0XB0 )
3) CSM 1277 ( 6GK7 277 -1AA00 - 0AA0)
本例中使用的MM440變頻器硬件為:
1) MM440 ( 6SE6440 - 2AB11 - 2AA1 )
2) MICROMASTER 4 ENCODER MODULE ( 6SE6400 - 0EN00 - 0AA0 )
3) SIEMENS MOTOR ( 1LA7060 - 4AB10 - Z )
4) USS 通信電纜 ( 6XV1830 - 0EH10 )
2.2. 接線
建議使用西門子的網(wǎng)絡(luò)插頭和PROFIBUS電纜,。在 S7-1200 CPU 通信口上使用西門子網(wǎng)絡(luò)插頭。
PROFIBUS 電纜的紅色導(dǎo)線B 即 RS 485 信號 +,,此信號應(yīng)當(dāng)連接到 MM 440 通信端口的 P+,;綠色導(dǎo)線A 即 RS 485 信號 -,此信號應(yīng)當(dāng)連接到 MM 440 通信端口的 N-,。
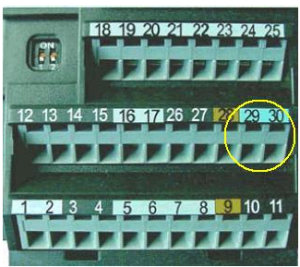

圖1: MM440接線端子 表4:MM440端子定義
因為MM 440 通信口是端子連接,,所以 PROFIBUS 電纜不需要網(wǎng)絡(luò)插頭,而是剝出線頭直接壓在端子上,。如果還要連接下一個驅(qū)動裝置,,則兩條電纜的同色芯線可以壓在同一個端子內(nèi)。PROFIBUS 電纜的紅色芯線應(yīng)當(dāng)壓入端子 29,;綠色芯線應(yīng)當(dāng)連接到端子 30,,如圖1、表4所示,。完整接線圖如圖2所示,。

圖2: S7-1200與MM440接線圖
a. 屏蔽/保護接地母排,,或可靠的多點接地。此連接對抑制干擾有重要意義,。
b. PROFIBUS 網(wǎng)絡(luò)插頭,,內(nèi)置偏置和終端電阻。
c. MM 440 端的偏置和終端電阻,。
d. 通信口的等電位連接,。可以保護通信口不致因共模電壓差損壞或通信中斷,。
e. 雙絞屏蔽電纜(PROFIBUS)電纜,,因是高速通信,電纜的屏蔽層須雙端接地(接 PE),。
注意,,以下幾點對網(wǎng)絡(luò)的性能有極為重要的影響。幾乎所有網(wǎng)絡(luò)通信質(zhì)量方面的問題都與未考慮到下列事項有關(guān):
? 偏置電阻用于在復(fù)雜的環(huán)境下確保通信線上的電平在總線未被驅(qū)動時保持穩(wěn)定,;終端電阻用于吸收網(wǎng)絡(luò)上的反射信號,。一個完善的總線型網(wǎng)絡(luò)必須在兩端接偏置和終端電阻。
? 通信口 M 的等電位連接建議單獨采用較粗的導(dǎo)線 ,,而不要使用 PROFIBUS 的屏蔽層,,因為此連接上可能有較大的電流,以致通信中斷,。
? PROFIBUS 電纜的屏蔽層要盡量大面積接 PE,。一個實用的做法是在靠近插頭、接線端子處環(huán)剝外皮,,用壓箍將裸露的屏蔽層壓緊在 PE 接地體上(如 PE 母排或良好接地的裸露金屬安裝板),。
? 通信線與動力線分開布線;緊貼金屬板安裝也能改善抗干擾能力,。驅(qū)動裝置的輸入/輸出端要盡量采用濾波裝置,,并使用屏蔽電纜。
? 在 MM 440 的包裝內(nèi)提供了終端偏置電阻元件,,接線時可按說明書直接壓在端子上,。如果可能,,可采用熱縮管將此元件包裹,,并適當(dāng)固定。

 化工儀器網(wǎng)
化工儀器網(wǎng)