 化工儀器網(wǎng)
化工儀器網(wǎng)










詳細介紹
西門子6AG4112-1GA00-5BX0 西門子6AG4112-1GA00-5BX0
選擇的優(yōu)勢:
1,、 采購總部位于德國,德國總公司直接歐美廠家采購,,5000多家優(yōu)質供應商。
2,、 技術力量強大,,有專業(yè)技術人員,相關品牌可提供產(chǎn)品的技術資料,。
3,、 德國公司集中采購,發(fā)貨及時庫存充足,。
4,、 貨期及時,拼單貨運,。每周從德國發(fā)貨,。
5、 合作過程簡約,,直接源頭采購成本低,。
電機在額定轉速以上運行
1.1 弱磁運行
通常情況下,對于額定頻率為50Hz的異步電機而言,,在變頻驅動時,,可以按電機的轉速分為恒轉矩調速和恒功率調速兩種模式:
§ 恒轉矩調速段,額定轉速以下(50Hz以下)
§ 恒功率調速段,,電機弱磁運行,,額定轉速以上(50Hz以上)
在恒功率調速段,隨著電機轉速上升,,輸出轉矩會下降,,輸出功率不變,以1LA7060-4AB10為例,,電機的特性曲線如下:
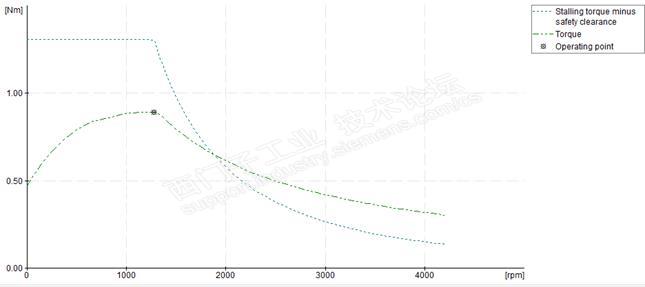
<圖1-1> 1LA7060-4AB10特性曲線
1.2 87Hz運行
一般情況下,,功率在45kW以下的西門子異步電機可以適用87Hz應用。電機可以在不弱磁的情況下,在額定轉速以上運行(變頻器輸出到87Hz),。以1LA7060-4AB10為例:
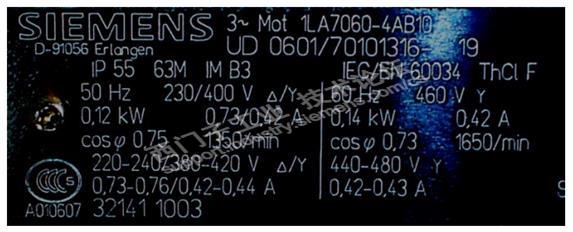
<圖1-2> 1LA7060-4AB10電機銘牌
電機參數(shù)如下:
§ 230V 角形/ 50Hz,,0.73A, 0.12kW,, 1350rpm,,功率因數(shù)0.75
§ 400V 星形/ 50Hz,0.42A,, 0.12kW,, 1350rpm,功率因數(shù)0.75
以G120變頻器為例,,在STARTER軟件中配置電機87Hz應用如下:
§ 電機繞組必須使用角形接法
§ 輸入角形接法的額定電機參數(shù),,并勾選87Hz運行:
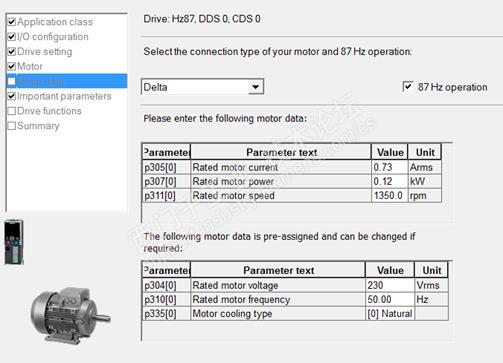
<圖1-3> 電機參數(shù)配置界面
§ 配置完成后,可在p0133參數(shù)中確認,。
2 87Hz運行探討
那么,,為什么電機可以不弱磁,87Hz運行,,并且電機繞組需要使用角形接法呢,?下文對此做一個簡單的探討:
2.1 電機的定子電壓
*,交流電機運行時,,電機中會形成旋轉磁場,,產(chǎn)生電磁力,驅動電機旋轉,。同時,,旋轉的磁場在定子繞組上產(chǎn)生感應電動勢E。電動勢E的大小與磁通量Φ和磁場的旋轉速度n滿足一下關系:
在忽略繞組壓降的情況下,,電機繞組上的相電壓等于電機的反電勢,。
2.2 電機在不同的繞組接法時,相電壓與線電壓對應關系
角形接法時,,線電壓與相電壓相等,,線電流是相電流的 倍;星形接法時,,線電壓是相電壓的
倍;星形接法時,,線電壓是相電壓的
倍,,線電流與相電流相等。

<圖2-2> 電機的繞組接法
2.3 87Hz應用,,電機繞組角形接法
以1LA7060-4AB10為例,,87Hz運行時:
§ 如果電機仍然使用星型接法,電機不弱磁運行到87Hz時,,要求變頻器的輸出電壓為690V,。對于實際應用來說,,一般變頻器供電電網(wǎng)電壓已經(jīng)固定,變頻器無法輸出690V電壓,;此外,,1LA7060-4AB10電機也無法在690V電壓下運行。
§ 如果將電機繞組改為角形接法,,電機不弱磁運行到87Hz,,根據(jù)前述內容,此時要求變頻器輸出的電壓為400V,。變頻器可在原供電電網(wǎng)下運行,,只需滿足角形接法時的額定電流要求即可。
2.4 87Hz應用注意事項:
§ 電機需要使用角形接法
§ 變頻器的功率需要比電機額定功率大:
87Hz運行時,,電機的功率為額定功率的 倍,,以1LA7060-4AB10電機為例,等效的電機參數(shù)如下:
電機額定電壓=
電機額定電流 = 0.73A
電機額定功率 =
電機功率因數(shù) = 0.75
電機額定頻率 = 87Hz
.2.1. S7-PLCSIM安裝與使用:
STEP7標準版并不包括S7-PLCSIM軟件包及授權,,需單獨購買,,STEP7 Professional 版包括了S7-PLCSIIM的軟件包及授權,安裝即可,。在菜單Options中,可以激活S7-PLCSIM,此時再進行上傳/下載/監(jiān)控等操作就是針對S7-PLCSIM了,,而不會對真實PLC進行操作(不論PLC是否聯(lián)機),。
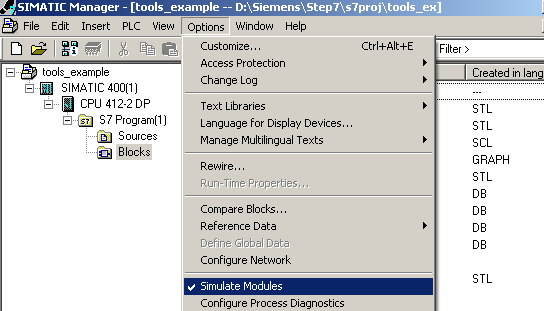
圖2 1S7-PLCSIM 調用
2.3. S7-PLCSIM軟件兼容性
不同S7-PLCSIM 軟件版本與STEP7及操作系統(tǒng)之間的兼容性:圖中的 X 表示兼容,- 表示不兼容
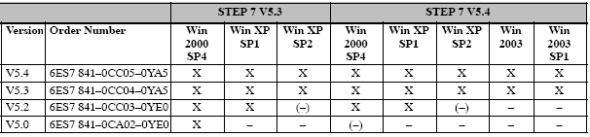
圖2 2S7-PLCSIM 軟件兼容性
3. S7-PLCSIM的使用
3.1. S7-PLCSIM特性
S7-PLCSIM 可以模擬一個S7控制器,,并且具備以下資源:
| 內存區(qū)域 | 描述 |
| 定時器 | T0-T2047 |
| M 存儲器 | 131,,072 BIT(16K BYTE) |
| I/O地址范圍 | 131,072 BIT(16K BYTE) |
| 過程映像區(qū)(可設置,,每個掃描周期更新) | 大131,,072 BIT(16K BYTE) |
| 預設值:8192 BIT(1024 BYTE) | |
| 本地數(shù)據(jù)區(qū)(可設置) | 大64K BYTE |
| 預設值:32K BYTE) | |
| 邏輯塊和數(shù)據(jù)塊 | 2048 FB/FC, 4095 DB |
| SFB | 除SFB12, SFB13, SFB14, SFB15, SFB16, SFB19, SFB20, SFB21, SFB22 , SFB23, SFB41, SFB42, SFB43, SFB44, SFB46, SFB47, SFB48, SFB49, SFB60,SFB61, SFB62, SFB63, SFB64, SFB65 以外的SFB |
| SFC | 除SFC7, SFC11, SFC12, SFC25, SFC35, SFC36, SFC37, SFC38, SFC48, SFC60, SFC61, SFC62, SFC65, SFC66, SFC67, SFC68, SFC69, SFC72, SFC73,SFC74, SFC81, SFC82, SFC83, SFC84, SFC87, SFC102, SFC103, SFC105,SFC106, SFC107, SFC108, SFC126, SFC127 以外的SFC |
| OB | 除OB55, OB56,OB57, OB61, OB62, OB63,OB64, OB81, OB84, OB87, OB88 and OB90以外的OB |
另外,S7-PLCSIM 還具備以下特性:
? 可以插入視圖來訪問:PLC的輸入/ 輸出/中間寄存器/定時器/計數(shù)器/數(shù)據(jù)塊,,支持符號地址訪問方式
? 可以使定時器自動運行或手動控制它們,,可以分別或統(tǒng)一復位定時器
? 可以更改CPU操作模式 (STOP, RUN, RUN-P)。并且S7-PLCSIM 提供了暫停模式,,用戶可停止程序的執(zhí)行,,而不影響仿真CPU中的狀態(tài)
? S7-PLCSIM 提供了單周期掃描模式,可以方便調試
? 可以使用中斷 OB 來測試程序邏輯
? 可以記錄一系列事件(操作輸入/輸出/M存儲器/定時器),,并且可以回放記錄的事件,,可以用于自動程序測試
? 可以使用所有的 STEP 7 工具來監(jiān)視和調試S7-PLCSIM所仿真的PLC(而不需要實際的硬件)
3.2. S7-PLCSIM調用
可以通過STEP7菜單Options-> Simulate Modules,激活S7-PLCSIM,; 或者通過點擊工具欄中的![]() 圖標,,來激活S7-PLCSIM,。
圖標,,來激活S7-PLCSIM,。
3.3. S7-PLCSIM簡單示例
3.3.1. S7-PLCSIM界面:
下圖為S7-PLCSIM工作界面,
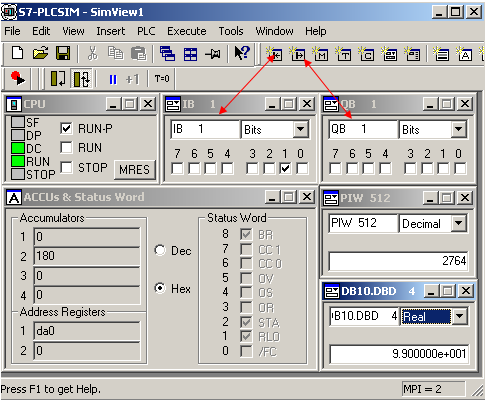
圖3 1: S7-PLCSIM 視圖
3.3.2. S7-PLCSIM菜單
1. File菜單:
用戶可以通過S7-PLCSIM菜單File > Save PLC As, 將當前模擬的PLC存儲為一個文件,,下次使用時可以通過File > Open PLC,直接打開此文件,,而不需要下載過程,方便調試,。對于S7-PLCSIM V5.4版本,,可以在此設置多種下載方式,例如,,MPI, DP, Ethernet,。
2. View菜單:
用戶可以通過View > Accumulators/Block Registers/Stacks來查看PLC內部的累加器/地址寄存器/狀態(tài)字/堆棧資源
3. Insert菜單:
用戶可以通過Insert >Input Variable插入變量(輸入/ 輸出/中間寄存器/定時器/計數(shù)器/數(shù)據(jù)塊)方式來模擬各種工況。
4. PLC菜單:
用戶可以通過PLC 菜單模擬真實PLC的上電/斷電,,內存復位操作,,以及修改PLC的MPI地址(S7-PLCSIM V5.4版本以下)。
5. Execute菜單: (僅對部分內容作解釋)
? Key Switch Position: RUN與RUN-P的區(qū)別,,在RUN情況下,,用戶無法下載程序及修改S7-PLCSIM內部存儲區(qū);RUN-P情況下,,用戶可以下載程序及修改S7-PLCSIM內部存儲區(qū),,在兩者中任意一種情況下,用戶程序都可以正常運行,。
? Startup Switch Position: 用戶可以選擇當S7-PLCSIM由STOP模式轉換到RUN模式時,,執(zhí)行的啟動類型:Cold Start, 操作系統(tǒng)將調用OB102,用戶程序從開始位置執(zhí)行,,存儲在非保持區(qū)的用戶數(shù)據(jù)被刪除,;Hot Start, 操作系統(tǒng)將調用OB101,并且用戶程序從中斷位置繼續(xù)執(zhí)行,;Warm Start, 操作系統(tǒng)將調用OB100,。
? Scan Mode: Single Scan S7-PLCSIM*的掃描模式,程序僅執(zhí)行一個周期,,當用戶通過Next Scan操作時,,S7-PLCSIM 執(zhí)行下一個掃描周期;Continuous Scan S7-PLCSIM 按照普通模式仿真真實PLC 掃描模式,。
? Next Scan: 當用戶可以使能S7-PLCSIM 執(zhí)行下一個掃描周期
? Pause: 在不影響輸出的情況下,,中斷當前仿真的程序,注意在暫停的情況下,,可能會導致其它應用程序與S7-PLCSIM的超時或連接中斷,。
? Automatic Timers:定時器自動運行
? Manual Timers: 可以通過插入定時器窗口,手動設置定時器的值及時基,。
? Reset Timers:用戶可以復位所有/部分的定時器
? Trigger Error OB:
? Scan Cycle Monitoring: 用戶可以在此設置允許的大程序執(zhí)行時間,,如果程序執(zhí)行超過此時間,,S7-PLCSIM將進入停止狀態(tài)。
6. Tools菜單:
? Record/Playback S7-PLCSIM主要用于模擬工況,,而即使一個簡單的工況也可能是由一定時間段內的各種觸發(fā)事件組成的,。如果重復調試某個工況,而*依賴于手工操作模擬,,是比較困難的,。S7-PLCSIM可以解決這個難題:編程人員可以將手工模擬過程錄制成一個事件文件,針對不同的工況,,可以錄制不同的事件文件,。選擇不同的事件文件,即可模擬不同的工況,,而不必一次又一次地去手動輸入,。
1) 錄制事件:此時操作者的每一步操作都會被記錄下來

圖3 2: 錄制事件
2) 回放事件:此時操作者的每一步操作會依次被重現(xiàn)(現(xiàn)在為第2 個操作)
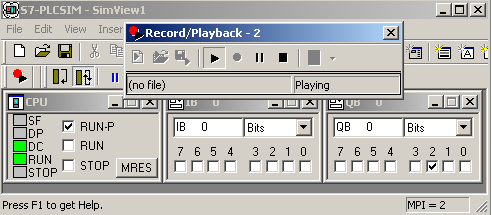
圖3 3: 事件回放
? Options 在此菜單下S7-PLCSIM可以先使用 Attach Symbols,導入step7項目的符號表,,然后在監(jiān)控的情況下使用,。
3.4. S7-PLCSIM的常見問題
3.4.1. 問題:S7-PLCSIM與在線連接的優(yōu)先級
問題:當S7-PLCSIM已經(jīng)運行,并且計算機已經(jīng)與真實PLC有正確的編程連接方式,,此時點擊在線監(jiān)控或者下載程序,,STEP7所訪問的節(jié)點是S7-PLCSIM還是真實PLC呢?
解答:S7-PLCSIM的優(yōu)先級要高于真實PLC在線連接的優(yōu)先級,。也就是說,,在S7-PLCSIM軟件運行的情況下,所有的下載/上傳/監(jiān)控操作,,都是針對S7-PLCSIM進行的,與真實PLC無關,。有時計算機與真實PLC無法建立連接可能就是因為S7-PLCSIM正在運行,,此時關閉S7-PLCSIM即可。
3.4.2. 問題:S7-PLCSIM與WinLC的區(qū)別
問題:S7-PLCSIM與WinLC有何區(qū)別,?
解答:WinLC的特性相當于真實PLC的特性, 所以此問題請參考本文中S7-PLCSIM與真實PLC區(qū)別的章節(jié),。
3.4.3. 問題:無法調用OB40
問題:為什么在S7-PLCSIM菜單中無法觸發(fā)OB40?
解答:S7-PLCSIM仿真真實的PLC,由于OB40與硬件組態(tài)關系密切,,所以只有在下載了硬件組態(tài)后(或者Block文件夾下的SDB文件),,在S7-PLCSIM菜單中才可以觸發(fā)OB40。
3.4.4. 問題:S7-PLCSIM仿真通信程序
問題:S7-PLCSIM是否可以仿真通信程序,,例如:PTP通信,,以太網(wǎng)通信?
解答:S7-PLCSIM無法仿真通信程序,此問題請參考本文中S7-PLCSIM與真實PLC區(qū)別的章節(jié),。
3.4.5. 問題:S7-PLCSIM是否可以仿真定時器或定時中斷功能
問題:S7-PLCSIM是否可以仿真定時器或定時中斷功能,?
解答:S7-PLCSIM的本質是一個在Windows環(huán)境下運行的應用程序,,所以其執(zhí)行狀態(tài)與計算機的性能及系統(tǒng)資源使用狀態(tài)都有著密切的聯(lián)系。其仿真程序的掃描周期也實時受計算機負荷的影響,,程序掃描周期可能會延長到幾十個毫秒或者幾百個毫秒,。因此,當S7項目中的定時器時基定義非常?。ɡ?0 毫秒)時,,或者定時中斷周期非常小(例如幾個毫秒)時,,S7-PLCSIM(受Windows運行機制及計算機性能影響)是無法在這么短的時間內完成應有相應的,。對于真實的PLC, 由于其實時功能是由硬件來保證的,所以不存在上述問題(如果程序量比較大,,程序掃描周期大于定時器的預設時間,,這種情況下應當使用定時中斷功能代替定時器的使用)。所以對于時序邏輯要求不嚴格的程序邏輯,,可以使用S7-PLCSIM仿真的,;對于時序邏輯要求嚴格的程序邏輯,使用S7-PLCSIM仿真是不可靠的,。
3.4.6. 問題:項目下載后,,S7-PLCSIM 的SF點亮
問題:為什么項目下載后,S7-PLCSIM 的SF點亮,,但程序仿真執(zhí)行不受影響,?
解答:這種情況多出現(xiàn)于向低版本的S7-PLCSIM 軟件下載了其無法識別的新硬件組態(tài)。用戶升級S7-PLCSIM的軟件版本即可,。
變頻器在提升設備的相關應用
這一期和大家談談變頻器驅動提升類負載的相關問題,,提升類負載實際上是位能性恒轉矩負載的一個通俗說法。大家能直觀想到這類負載的實際應用,,比如:起重機的主鉤副鉤,,卷揚機、電梯,,扶梯,,堆垛機升降機構,礦井罐籠,,上料小車,,斗提機,塔機,,港口的裝卸橋,,門機,車廠的搬運設備等等,。
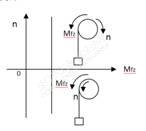
我們在之前的欄目中曾經(jīng)介紹過機械負載的分類,,其中包含位能性恒轉矩負載,,這里再次回顧一下這種負載類型的特點:
1、 負載轉矩恒定,。
2,、 負載轉矩方向始終向下。
3,、 特性曲線位于*,、第四象限。
4,、 重物下放,,存在能量回饋情況,。
針對這種負載特性,無論哪個行業(yè),,什么工況的提升機設備,,對于變頻器電機構成的電氣傳動系統(tǒng)來講,,核心的兩個問題就是:
(1) 位能的處理。
(2) 抱閘的控制,。
一,、位能的處理:
1、重物下放過程中能量的轉換過程
a.重物下放,,重力勢能轉換成重物的動能,。
b.重物通過鋼絲繩、減速機等機械機構反脫電機(電機轉子速度超過變頻器輸出的速度),,使得電機處于發(fā)電狀態(tài),,重物所具有的動能轉化成電能。
c.電能通過變頻器的逆變橋二極管,,流向直流回路,。
d.由于直流環(huán)節(jié)的電容容量所限,電能不可能無限制地吸收,。
2,、直流環(huán)節(jié)電能的處理:
a.如果變頻器配備了制動單元和制動電阻,,可以通過CU單元控制制動單元的開通,將制動電阻接入,,將電能轉換成電阻發(fā)熱的熱能,。
b.如果變頻器的整流橋具備能量回饋功能,可以通過CU單元控制控制整流單元,,將能量回饋到電網(wǎng),。
c.電機回饋能量的及時處理,, 確保變頻器不發(fā)生過電壓故障。
d.當然直流環(huán)節(jié)的電能是通過發(fā)熱消耗掉,,還是回饋電網(wǎng)再利用,,需要綜合考慮設備的工況和變頻器的投入預算。
二,、抱閘的控制:
電機抱閘的控制,,西門子變頻器提供了抱閘控制方式,比如順序控制,,通過BICO互聯(lián)參數(shù)進行控制,。當電機的控制方式為矢量控制時,開閉抱閘條件為設定輸出扭矩的門限值,;如果電機的控制方式為V/F方式,,開閉抱閘條件設定為速度的百分比。
對于西門子的S120,、G130,、G150系列變頻器,還提供了擴展抱閘功能,,擴展抱閘的控制功能更強大一些,,可以加入一些更復雜的狀態(tài)參量,去控制抱閘,。
當然電機抱閘的控制也可以用外圍的PLC進行控制,。
三,、提升類負載變頻器調試注意事項
1、 抱閘的邏輯的調試,、打開關閉延時時機調試(P1216,P1217),。
2,、 多變頻器控制多電機的系統(tǒng),,抱閘的動作需要*。
3,、 抱閘線圈不允許接到變頻器的輸出,,需要正確接到相應電源上,。
4、 制動單元,、制動電阻參數(shù)正確設置(P219,、P1531),。
5、 制動電阻工作過程中會發(fā)熱,,需保證制電阻周圍有足夠的散熱空間。
6,、 速度環(huán)優(yōu)化、考慮 加速度預控,。
7,、 各種限幅保護,,比如轉矩、電流,、功率等,。
8、 對于載客人電梯,,需要考慮舒適度,,可以增加圓弧曲線;增設稱重傳感器,,進而調整速度環(huán)PI參數(shù),。
9、 這類負載通常需要帶載啟動,,要求變頻器能夠在低頻輸出大的扭矩,,需要調整低頻補償電壓。
10,、 通常提升類應用,,在軌道上或者鋼絲繩滾筒上,都會設置極限,、超極限保護,,系統(tǒng)超速保護,、鋼繩過卷保護,防止重物沖頂或者墜底,。
11,、 對于垂直載人電梯,設置機械電氣的多重保護,,比如機械限速、超重,、井道安全鉗等,。
四、提升類負載常見問題及處理
1,、 溜車:需要檢查抱閘延遲時間,開閉抱閘的扭矩,,或者外圍控制抱閘的邏輯,,抱閘的機械執(zhí)行機構是否有問題。
2,、 過流:抱閘打開過晚,電機處于堵轉狀態(tài),;重物由懸停狀態(tài)進行二次起升時抱閘打開過早,,重物開始下落,電機的輸出扭矩不足以克服重物向下的扭矩,,電機降速過程中抱閘投入過早,;提升重量超過額定負載;速度環(huán)參數(shù)不合理,。
3、 過壓:可能制動電阻功率不夠,,或者參數(shù)設置不合適,。
4,、 制動電阻發(fā)熱嚴重, 檢查電阻功率選擇,,是否滿足負載回饋功率的峰值及平均功率的曲線,,是否滿足電阻本身負載的重復周期。制動模塊和制動電阻的負載曲線請參考下圖:


 化工儀器網(wǎng)
化工儀器網(wǎng)