 化工儀器網
化工儀器網










詳細介紹
哪里賣西門子軟件
追求,,追求精確
要通過“嚴格”的檢驗程序,以可編程控制器(PLC)產品為例,,在整個生產過程中針對該類產品的質量檢測節(jié)點就超過20個,。視覺檢測是數字化工廠*的質量檢測方法,相機會拍下產品的圖像與Teamcenter數據平臺中的正確圖像作比對,,一點小小的瑕疵都逃不過SIMATIC IT品質管理模塊的“眼睛”,。對比傳統(tǒng)制造企業(yè)的人工抽檢,這顯然要可靠又快速得多,。”
PID 移植
S7-200 SMART 與 S7-200一樣,,支持8路PID控制,支持模擬量輸出及PWM輸出
PID 向導移植
將 S7-200 帶有PID向導生成的程序用 S7-200 SMART打開,,提示錯誤,,如下圖所示:

圖1. S7-200 PID程序在S7-200 SMART 打開報錯
解決方法:
1,新建 S7-200 SMART項目,,并進行正確的設備組態(tài)
2,,將 S7-200程序用STEP 7-Micro/win SMART 軟件打開,將除PID子程序之外的程序段復制到新項目
3,,修改新項目的 I/O 地址及模擬量轉換量程與S7-200 SMART 匹配
PID 指令移植
比較 S7-200 與 S7-200 SMART PID回路表,,兩者*相同,如下表所示:
表1. S7-200 與 S7-200 SMART PID 回路對比表
偏移 | 類型 | S7-200 | S7-200 SMART |
|---|---|---|---|
| 0 | 過程變量(PVn) | 包含過程變量,,其值必須標定在 0.0 到 1.0 之間 | |
| 4 | 設定值(SPn) | 包含設定值,,其值必須標定在 0.0 到 1.0 之間 | |
| 8 | 輸出(Mn) | 包含計算出的輸出,其值必須標定在 0.0 到 1.0 之間 | |
| 12 | 增益(Kc) | 包含增益,,為比例常數,。 可以是正數或負數 | |
| 16 | 采樣時間 | 包含采樣時間,單位為秒,。 必須是正數 | |
| 20 | 積分時間 | 包含積分時間或復位,,單位為分 | |
| 24 | 微分時間 | 包含微分時間或速率,單位為分 | |
| 28 | 偏置 | 包含偏置或積分和值,,介于 0.0 到 1.0 之間 | |
| 32 | 前一過程變量 | 包含上次執(zhí)行 PID 指令時存儲的過程變量值 | |
| 36 | PID擴展表 | ‘PIDA’(PID 擴展表,,版本 A): ASCII 常數 | |
| 40 | AT 控制 | ||
| 41 | AT 狀態(tài) | ||
| 42 | AT 結果 | ||
| 43 | AT 配置 | ||
| 44 | 偏差 | 大 PV 振蕩幅度的標準化值(范圍: 0.025 到 0.25) | |
| 48 | 滯后 | 用于確定過零的 PV 滯后標準化值(范圍: 0.005 到 0.1) | |
| 52 | 初始輸出階躍 | 輸出值中階躍變化的標準化大小,用于使 PV 產生振蕩(范圍:0.05 到 0.4) | |
| 56 | 看門狗時間 | 兩次過零之間允許的大秒數值(范圍:60 到 7200) | |
| 60 | 建議增益 | 自整定過程確定的建議回路增益 | |
| 64 | 建議積分時間 | 自整定過程確定的建議積分時間 | |
| 68 | 建議微分時間 | 自整定過程確定的建議微分時間 | |
| 72 | 實際階躍大小 | 自整定過程確定的標準化輸出階躍大小值 | |
| 76 | 實際滯后 | 自整定過程確定的標準化 PV 滯后值 | |
如上表所示,,兩者PID回路表**,,所以,當將S7-200 PID 指令編程進行移植時,,需將反饋與輸出的模擬量地址按照 S7-200 SMART 的地址分配進行修改,,同時修改模數轉換數值即可。如下圖所示:
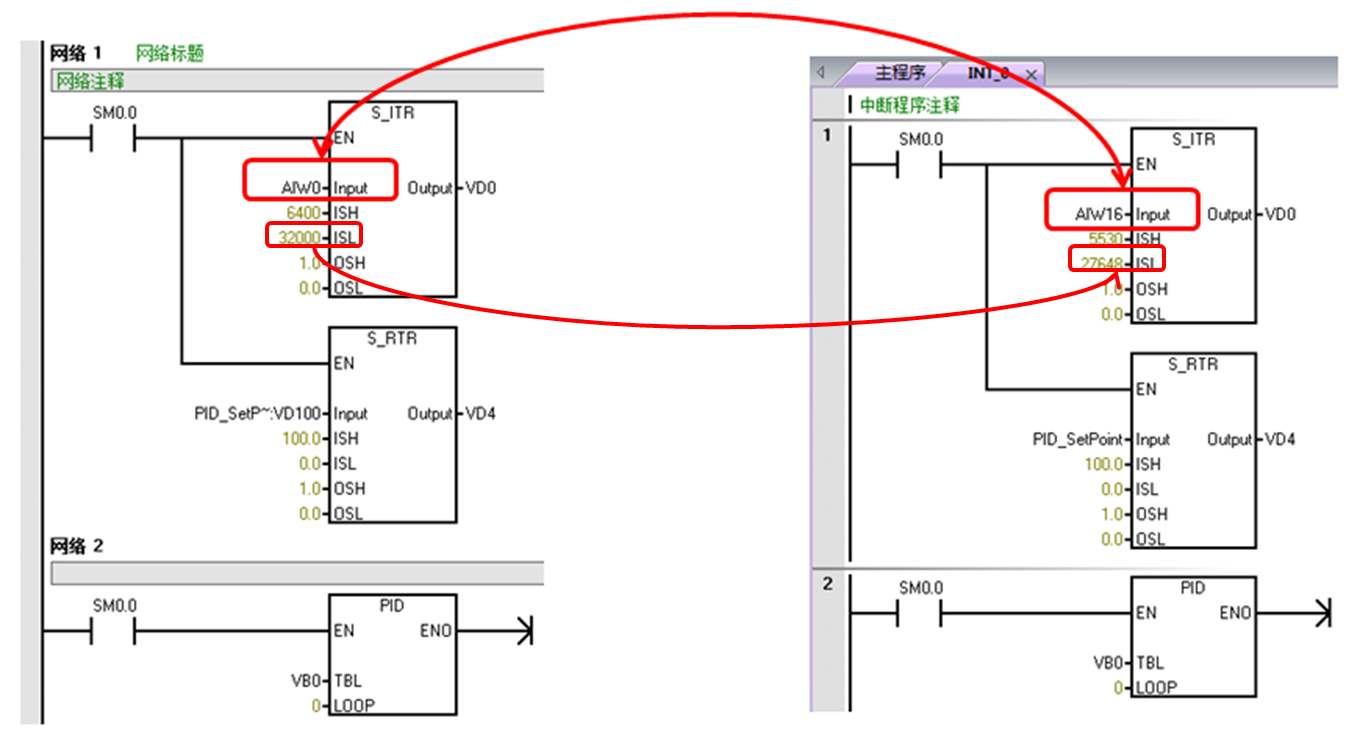
圖2. 程序移植
1 S7-1200與變頻器的連接哪里賣西門子軟件
1.1本例程的系統(tǒng)配置
本例程中用到的硬件: S7-1200(CPU 1214C),、G120 ( 控制單元CU240B-2 ),、一臺裝有TIA Portal軟件的PC機,、CM1241模塊、電源模塊,、標準RJ45網線,。
1.2 硬件連接
1.2.1硬件連線
本例程中的硬件間的結構如下圖所示:

圖1-1
1.2.2 PLC與控制單元通信端口之間的連接
用電纜將CU240B-2 Modbus 通訊接口與PLC通信模塊連接起來,如下圖所示,。
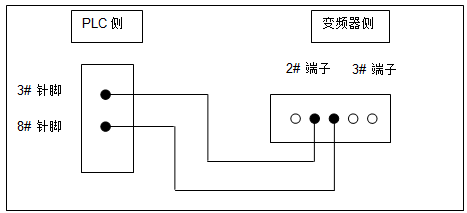
圖1-2
2 變頻器設置
2.1 地址設置
可以通過控制單元上的地址開關,,也可以通過參數 P2021 或 STARTER 中“Control Unit / Communication / Field bus”頁面來確定變頻器的 Modbus-RTU 地址。
只有所有地址開關都設為“OFF”(0)時,,P2021 或 STARTER 中的設置才有效,。否則,Modbus-RTU 地址為地址開關所設置的地址,。
2.2 參數設置
除了設置地址之外,,還需要對其他一些變頻器的通信參數進行設置,才可以進行MODBUS通信,。具體需要設置的參數如表2-1所示:
表2-1
| 參數 | 描述 |
| P0015 = 21 | 變頻器宏程序 選擇 I/O 配置 |
| p2030 = 2 | 現(xiàn)場總線協(xié)議選擇 2: Modbus |
| p2020 | 現(xiàn)場總線波特率 設置范圍是 4800 bit/s … 187500 bit/s,出廠為 19200 bit/s |
| p2024 | Modbus 計時
|
| p2029 | 現(xiàn)場總線錯誤統(tǒng)計 指現(xiàn)場總線接口上接收錯誤的統(tǒng)計、顯示 |
| p2040 | 過程數據監(jiān)控時間 指沒有收到過程數據時發(fā)出報警的延時,。 注: 該時間必須根據從站數量,、總線波特率加以調整,出廠為 100 ms,。 |
1 概述
SINAMICS V90固件版本1.05以上開始,,伺服驅動器提供了Modbus RTU 通信功能。PLC可以通過 Modbus 的FC3及FC6功能代碼讀取或寫入伺服驅動的寄存器,,S7-200 Smart可通過標準的Modbus功能塊完成發(fā)送伺服驅動器的控制指令及讀寫驅動的參數,。本文詳細描述了S-200 SMART PLC 通過Modbus RTU 通信連接SINAMICS V90實現(xiàn)內部位置的MDI功能。
2 *條件
2.1 使用的硬件
使用的硬件如表2-1所示,。
序號 | 設備名稱 | 訂貨號 |
1 | SIMATIC S7-200 SMART CPU ST60 | 6ES7288-1ST60-0AA0 |
2 | V90驅動器 | 6SL3210-5FE10-4UA0(V1.05版本以上) |
3 | 伺服電機 | 1FL6042-1AF61-0LG1 |
4 | 電機及編碼器配套電纜 |
|
表2-1使用的硬件
2.2 使用的軟件
使用的軟件如表2-2所示,。
序號 | 描 述 |
1 | Window 7 旗艦版 32位或64位 |
2 | STEP 7-Micro/WIN SMART 編程軟件 |
3 | SINAMICS V-ASSISTANT V1.02 |
表2-2使用的軟件
2.3 通信連接
SINAMICS V90 伺服驅動通過 RS485 電纜與 PLC 連接,使用標準 Modbus 通信協(xié)議進行通訊,。通過Modbus PLC給V90發(fā)送伺服使能和停止命令并且可以讀取伺服驅動器的狀態(tài)及故障代碼,。
SINAMICS V90 伺服驅動通過 RS485 接口(X12)使用 MODBUS 協(xié)議與 PLC RS485(端口 0) 進行通訊,接線如圖2-1所示,。

圖2-1 S7-200 SMART CPU 與V90通訊線連接
3 通過Modbus通信實現(xiàn)V90內部位置控制的MDI功能
3.1 V90 Modbus 寄存器說明
V90內部控制的控制數據寄存器如表3-1所示,。
寄存器編號 | 描述 | 單位 | 定標系數 | 范圍 |
40100 | IPOS控制模式控制字 |
|
|
|
40932/40933 | MDI 速度設定值 | 1000LU/min | 1 | 1至2147482647 |
40934 | MDI 加速度倍率 | % | 100 | 0.1 至100 |
40935 | MDI 減速度倍率 | % | 100 | 0.1 至100 |
40102 | 位置設定值高字 | LU | 1 | -2147482648至 2147482647 |
40103 | 位置設定值低字 |
表3-1 V90的內部位置控制數據寄存器
IPOS控制模式寄存器 40100控制字的定義如表3-2所示,。
位 | 信號 | 描 述 |
0 | SON_OFF1 | 通過上升沿使能伺服,=0時驅動通過斜坡函數發(fā)生器停車,,脈沖被取消 |
1 | OFF2 | 1:OFF2=1,允許使能 0:OFF2=0,立即取消脈沖 |
2 | OFF3 | 1:OFF3=1,允許使能 0:OFF3=0,,快速停車,脈沖被消除 |
3 | OPER | 1:允許運行(脈沖可以被使能) 0:禁止運行(取消脈沖) |
4 | SETP_ACC | 觸發(fā)上升沿來接收MDI 設定值 |
5 | TRANS_TYPE SE | 1:立即接收新的設定值 0:通過觸發(fā)上升沿來接收新的設定值 |
6 | POS_TYP | 1:定位 0:相對定位 |
7 | RESET | 復位故障 |
8 | 預留 |
|
9 | 預留 |
|
10 | PLC | 使能 PLC 的控制權 |
11 | 預留 |
|
12 | 預留 |
|
13 | SREF | 啟動回參考點(對于p29240=0,,通過REF 信號回參考點) |
14 | 預留 |
|
15 | 預留 |
|
表3-2 寄存器 40100控制字的定義
3.2 V90參數設置
按照表3-3設置伺服驅動器的相關參數
參數設置 | 說明 |
P29003=1 | P29003為內部控制模式 |
P29303[0]=3 | 設置DI3為CWL,,正限位,連接限位開關為高電平 |
P29304[0]=4 | 設置DI4為CCWL,,負限位,,連接限位開關為高電平 |
P29004=1 | 設置SINAMICS V90 的MODBUS站地址為1 |
P29007=2 | 設置通信協(xié)議為Modbus 協(xié)議 |
P29008=1 | 選擇 Modbus 控制源,設定值和控制字來自于 Modbus PZD |
P29009=8 | 設置傳輸波特率為38400 波特 |
表3-3伺服驅動器的相關參數
3.3 PLC的編程
PLC的編程如表3-4所示。
序號 |
|
1 | 初始化Modbus通信接口,,需確保 PLC 的波特率與驅動設置*,,設置 PLC 校驗方式為偶校驗(parity = 2)。
|
2 | 通過寄存器 40100 寫入需要的控制字,。必須設置寄存器 40100 的位 10 為1 以允許 PLC 控制驅動,。使能驅動器,先將16進制數 40E 寫入寄存器40100 中,,然后再寫入 40F),。
|
3 | 如果需要對帶增量編碼器驅動執(zhí)行回參考點操作,保持驅動為伺服使能狀態(tài),,可通過寫控制字 40100 第13位,,執(zhí)行回參考點操作。 |
4 | 通過MBUS_MSG功能塊,,將位置設定值和速度設定值寫入寄存器 40932,、40933、40934,、40935,、40102 和40103 中。
|
5 | MDI相對定位的40100控制寄存器操作:
|
| MDI定位的40100控制寄存器操作:
|
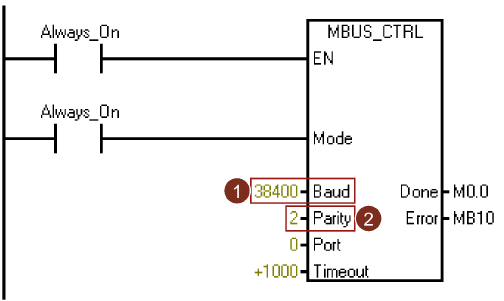


表3-4 PLC的編程

 化工儀器網
化工儀器網