 化工儀器網
化工儀器網










詳細介紹
西門子G120XA變頻器
上海盟疆工業(yè)自動化設備有限公司在經營活動中精益求精,,具備如下業(yè)務優(yōu)勢:
上海盟疆工業(yè)自動化設備有限公司*銷售西門子PLC,200,,300,400,,1200,,西門子PLC附件,西門子電機,,西門子人機界面,,西門子變頻器,西門子數控伺服,,西門子總線電纜現貨供應,,咨詢系列產品,折扣低,,貨期準時,,并且備有大量庫存. 長期有效
西門子數控伺服系統(tǒng):802C S、802D SL,、810D DE,、820D SL、840C CE,、840D DE,、840D SL、840Di SL,、S120數 控 系 統(tǒng),、數 控 伺 服 驅 動 模 塊、控制 模 塊,、電 源模 塊,、備 品 備 件 等。
本公司產品質量按西門子原廠質量標準,,產品質保一年,,按西門子原廠包裝標準,西門子原裝 原裝產品,,按廠家執(zhí)行標準,,需方收到貨后七日內可提出異議!??!
我們賣的不是價格。賣的是誠信賣的是品質
西門子推出適合基本應用的Sinamics V20變頻器
西門子今天在中國推出一款適合基本應用的新型單機變頻器,,即SINAMICS V20,。該變頻器由西門子中,、德、英三國工程師共同設計研發(fā),,并在西門子數控(南京)有限公司生產,。該款變頻器結構緊湊、堅固耐用,、調試迅速,、操作簡便且經濟實用。西門子(中國)有限公司工業(yè)業(yè)務領域驅動技術集團副總裁兼運動控制部總經理裴安咨表示:“此次推出的新型變頻器SINAMICS V20是西門子將科技系統(tǒng)應用到本地產品設計中的優(yōu)秀*,。西門子始終以中國市場的需求為依托,,不斷設計出適合本地需求的產品和解決方案。”
簡單傳動任務需要方便而經濟實用的解決方案,。Sinamics V20變頻器具有兩種供電方式,,共四種外形尺寸,功率范圍覆蓋0.12kW至15kW,,適用于拖動泵、風機,、壓縮機或輸送機系統(tǒng),,以及加工與輸送領域內的簡單任務。這種緊湊型變頻器可并排安裝以節(jié)省安裝空間,。除了采用常規(guī)柜壁式安裝外,,還可進行穿墻式安裝。由于無需其它模塊或附加選件即可運行,,大大縮短了安裝時間,。通過集成式操作員面板(BOP),可順利地進行現場調試和操作,。除了具有便于連接控制器的通用串行接口外,,該終端還具有一個應用于電子控制器上的通用語言Modbus接口,可用于與第三方控制器進行通信,。預制的接口和應用宏(即把一組命令組織在一起完成一個特定的任務),,便于進行面向應用的設置。對于額定功率高于7.5kW的變頻器,,該款變頻器可將制動電阻器與集成的制動斬波器直接連接,。
易于使用
Sinamics V20變頻器的操作與調試一樣方便,用戶可以將已針對某個應用進行優(yōu)化的參數方便地傳輸到其它變頻器上,??梢允褂肧D或MMC卡并通過BOP接口或電池供電的參數加載器來保存數據(變頻器在沒有主電源的條件下也能進行操作),并根據需要加載數據,。也可以加載新固件,。預定義的連接宏和應用宏(可用于泵,、風機、壓縮機以及傳送帶等)為特定應用提供了正確便捷的設置,。Sinamics V20“保持運行模式”的自動調節(jié)功能可以讓產品適應電源狀況,,以便在不穩(wěn)定的電網上保持良好運行。輸入電源的波動會在設備內部得到補償,,錯誤消息會自動得到識別,。由于采用增強冷卻設計以及配備帶涂層PCB和高可靠性的電子元件,Sinamics V20在電氣和機械方面都極為耐用,,即使在惡劣環(huán)境條件下,,性能也十分可靠。
本篇FAQ適用于MICROMASTER4,,SINAMICS G110M和SINAMICS G120中不帶“-2”的控制單元的產品,。......
狀態(tài)字 1 (ZSW 1) 可以顯示變頻器的狀態(tài)。
在上電和ON/OFF1 命令后,,MICROMASTER 4 和SINAMICS G110M和G120X 變頻器所表示的實際狀態(tài)有什么不同,?
狀態(tài)字1(r0052)的位0,1,,2,,6提供了變頻器的實際狀態(tài)。
MM4 和G120/G120D這些位在上電和 ON/OFF1 命令后的狀態(tài)是不同的,。
對于MM4變頻器,,位0,1和2是交替被設定為:001,,010,,100。
對于G110M/ G120X變頻器,,位0,,1和2是附加地被設定為:000,001,,011,,111(與PROFIDrive的描述*)。
根據狀態(tài)位的信息來調整PLC的程序,。
對于使用MM4變頻器的客戶,,在他們控制系統(tǒng)中的程序會使用這些位;某些階段客戶想全部或者部分替換為G110M/G120X變頻器,,這時已經存在的程序邏輯將不能正確執(zhí)行,,在這種情況下程序必須做出相應修改。
不同點和調整點:
大的不同是位 r0052.2“驅動器正在運行”(參考圖1 和 2),。
對于這兩種驅動器,,位r0052.2在啟動后(ON命令后)被置位,。
復位:
對于MM4在停止的時候復位.
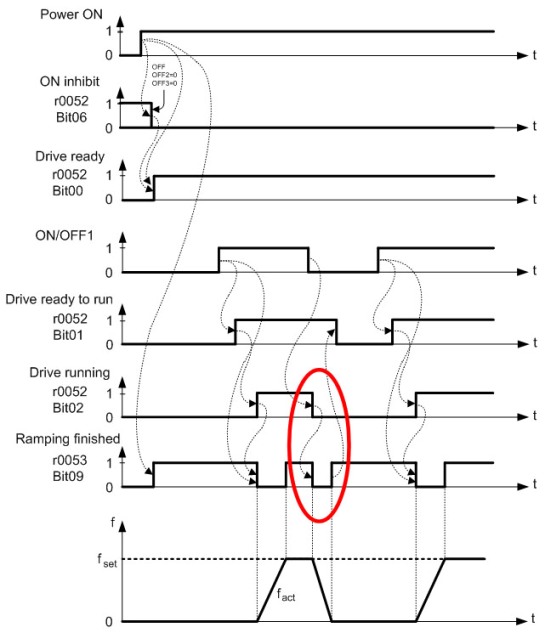
對于 G110M/G120x 變頻器, OFF1命令撤銷后位 r0052.2立即被復位.
對于G110M/G120x變頻器如果想模擬與MM4變頻器一樣的 "驅動器正在運行" 狀態(tài),你可以使用位r0052.1 "驅動器準備運行" (參考圖2).
在上電和ON/OFF1 命令后,,MICROMASTER 4 和SINAMICS G110M和G120X 變頻器所表示的實際狀態(tài)在下面圖表中可以查看到,。
用戶可以根據下面的圖表來調整相應的程序。
圖 1 - MICROMASTER 4 上電和ON/OFF1命令后的狀態(tài)圖

圖 2 - SINAMICS G110M/G120X 上電和ON/OFF1命令后的狀態(tài)圖
 西門子G120XA變頻器
西門子G120XA變頻器
參數描述
參數 | 含義 | MM4 | G110M/G120x |
|---|---|---|---|
r0052 | 狀態(tài)字 1 | X | X |
r0053 | 狀態(tài)字 2 | X | X |
r0052
位 | 含義 | 否 | 是 |
|---|---|---|---|
Bit00 | 驅動準備 | 0 | 1 |
Bit01 | 驅動準備運行 | 0 | 1 |
Bit02 | 驅動運行 | 0 | 1 |
Bit06 | ON禁止激活 | 0 | 1 |
1.1 概述
無論在帶編碼器矢量控制(VC)和無編碼器矢量控制(SLVC)下,,動態(tài)優(yōu)化都是保證控制精度和高動態(tài)響應的前提,。只有在矢量控制模式(P1300≥20)下,才需要對電機進行動態(tài)優(yōu)化,。動態(tài)優(yōu)化包括兩種模式:旋轉測量(包含飽和曲線測量,、轉動慣量測量和速度控制器優(yōu)化)和速度控制器優(yōu)化(包含轉動慣量測量和速度控制器優(yōu)化)。
動態(tài)識別必須在以下條件下才能完成:
1. 接線正確,,并且變頻器和電機沒有絕緣故障,;
2. 電機的銘牌參數準確的輸入到變頻器中;
3. 電機在空載狀態(tài)下,;
4. 電機可以自由旋轉,;
5. 靜態(tài)識別已經完成。
1.2 相關參數
當執(zhí)行過旋轉測量以后,,不必再執(zhí)行速度控制器優(yōu)化,。速度控制器優(yōu)化已經包含在旋轉測量中。如果選擇P1300≥20,,并且沒有完成靜態(tài)識別,變頻器會報出A07994,,提示電機靜態(tài)識別未完成,。
表 STYLEREF 1 s 1? SEQ 表 * ARABIC s 1 1動態(tài)優(yōu)化的參數設置
參數號 | 出廠值 | 描述 |
P1900 | 0 | 電機數據檢測及旋轉檢測 |
P1910 | 0 | 電機數據檢測 |
P1960 | 0 | 1(旋轉測量,無編碼器矢量控制下) |
3(速度控制器優(yōu)化,,無編碼器矢量控制下) | ||
2(旋轉測量,,帶編碼器矢量控制下) | ||
4(速度控制器優(yōu)化,帶編碼器矢量控制下) | ||
P1961 | 40% | 檢測飽和曲線時的轉速 |
P1965 | 40% | 檢測轉動慣量時的轉速 |
P1967 | 100% | 速度控制器優(yōu)化的動態(tài)系數 |
注意:在動態(tài)優(yōu)化過程中,,電機會頻繁的加速和減速,,可以通過設置P1961和P1965限制優(yōu)化過程中電機的高轉速;
G120(cu2x0x-2x)變頻器執(zhí)行動態(tài)優(yōu)化過程中,,表1-2中的這些參數會被自動測量和設置,,以幫助變頻器提高控制精度和動態(tài)響應。其中,,轉速控制器適配的說明和使用請參看《G120(CU2x0x-2)轉速控制器適配》文檔,。
表 STYLEREF 1 s 1? SEQ 表 * ARABIC s 1 2動態(tài)優(yōu)化測量的參數
參數號 | 描述 | 參數號 | 描述 |
r331 | 實際的電機勵磁電流 | P1464 | 轉速控制器適配轉速下限 |
P341 | 電機轉動慣量 | P1465 | 轉速控制器適配轉速上限 |
P342 | 總轉動慣量與電機轉動慣量比 | P1470 | 無編碼器運行時轉速控制器的P增益 |
P360 | 電機勵磁電感 | P1472 | 無編碼器運行時轉速控制器的積分時間 |
P1460 | 轉速控制器P增益適配轉速下限 | P1496 | 加速度前饋定標 |
P1461 | 轉速控制器P增益適配轉速上限比例系數 | r1968 | 轉速控制器優(yōu)化的動態(tài)系數 |
P1462 | 轉速控制器積分時間適配轉速下限 | r1973 | 檢測出編碼器的脈沖數 |
P1463 | 轉速控制器積分時間適配轉速上限比例系數 |
|
|
1.3 動態(tài)優(yōu)化操作步驟
無編碼器矢量控制動態(tài)優(yōu)化操作步驟
當完成變頻器的快速調試以后,進行如下設置:
1,、設置P1900=1,,P1910=1,,P1960=1;
2,、此時屏幕上出現報警代碼A07991和A07980,,提示靜態(tài)識別和動態(tài)優(yōu)化已經激活;
3,、啟動變頻器,,靜態(tài)識別開始,電機發(fā)出蜂鳴聲,;
4,、靜態(tài)識別結束后,報警代碼A07991消失,,蜂鳴聲消失,,變頻器自動停機;
5,、再一次啟動變頻器,,動態(tài)優(yōu)化開始,電機開始旋轉,;
6,、動態(tài)優(yōu)化結束后,報警代碼A07980消失,,變頻器自動停機,;
7、將P0971=1,,執(zhí)行Copy RAM to ROM.
帶編碼器矢量控制動態(tài)優(yōu)化操作步驟
當完成變頻器的快速調試以后,,進行如下設置:
1、設置P1900=1,,P1910=1,,P1960=2;
2,、此時屏幕上出現報警代碼A07991和A07980,,提示靜態(tài)識別和動態(tài)優(yōu)化已經激活;
3,、啟動變頻器,,靜態(tài)識別開始,電機發(fā)出蜂鳴聲,;
4,、靜態(tài)識別結束后,報警代碼A07991消失,,蜂鳴聲消失,,變頻器自動停機,;
5、再一次啟動變頻器,,動態(tài)優(yōu)化開始,,電機開始旋轉;
6,、動態(tài)優(yōu)化結束后,,報警代碼A07980消失,變頻器自動停機,;
7,、將P0971=1,執(zhí)行Copy RAM to ROM.

 化工儀器網
化工儀器網