 化工儀器網(wǎng)
化工儀器網(wǎng)










詳細(xì)介紹
西門子西北代理商
上海盟疆工業(yè)自動(dòng)化設(shè)備有限公司工業(yè)業(yè)務(wù)領(lǐng)域致力于為客戶提供高品質(zhì)的服務(wù),追求客戶的滿意是我們始終如一的目標(biāo),。在中國(guó),,工業(yè)業(yè)務(wù)領(lǐng)域擁有一支技術(shù)過(guò)硬、經(jīng)驗(yàn)豐富的工程師隊(duì)伍,,為客戶提供7x24小時(shí)全天候服務(wù),。專業(yè)的服務(wù)人員和遍布全國(guó)的服務(wù)及備件網(wǎng)絡(luò)將對(duì)客戶的服務(wù)需求迅速作出響應(yīng),將由設(shè)備故障引起的損失降低到小的程度,。
設(shè)計(jì)
SIMATIC S7-1200 系列包括以下模塊:
- 性能分級(jí)的不同型號(hào)緊湊型控制器,,以及豐富的交/直流控制器。
- 各種信號(hào)板卡(模擬量和數(shù)字量),,用于在 CPU 上進(jìn)行經(jīng)濟(jì)的模塊化控制器擴(kuò)展,,同時(shí)節(jié)省安裝空間。
- 各種數(shù)字量和模擬量信號(hào)模塊,。
- 各種通信模塊和處理器,。
- 帶 4 個(gè)端口的以太網(wǎng)交換機(jī),用于實(shí)現(xiàn)各種網(wǎng)絡(luò)拓?fù)?/li>
- SIWAREX 稱重系統(tǒng)終端模塊
- PS 1207 穩(wěn)壓電源裝置,,電源電壓 115/230 V AC,,額定電壓 24 VDC
機(jī)械特性
- 堅(jiān)固、緊湊的塑料機(jī)殼
- 連接和控制部件易于接觸,,并由前蓋板提供保護(hù)
- 模擬量或數(shù)字量擴(kuò)展模塊也具有可拆卸的連接端子
設(shè)備特性
- 標(biāo)準(zhǔn):
SIMATIC S7-1200 符合 VDE,、UL、CSA 和 FM(I 類,,類別 2,;危險(xiǎn)區(qū)組別 A、B,、C 和 D,,T4A)。生產(chǎn)質(zhì)量管理體系已按照 ISO 9001 進(jìn)行認(rèn)證,。
通信
SIMATIC S7-1200 支持各種通信機(jī)制:
- 集成 PROFINET IO 控制器接口
- 帶 PROFIBUS DP 主站接口的通信模塊
- 帶 PROFIBUS DP 從站接口的通信模塊
- GPRS 模塊,,用于連接到 GSM/G 網(wǎng)絡(luò)
- LTE 模塊,用于在第四代 LTE(長(zhǎng)期演進(jìn))網(wǎng)絡(luò)中進(jìn)行通信。
- 通信處理器,,可通過(guò)以太網(wǎng)接口連接到 TeleControl Server Basic 控制中心軟件,,并借助于基于 IP 的網(wǎng)絡(luò)進(jìn)行安全通信。
- 通信處理器,,可連接到服務(wù)應(yīng)用的控制中心,。
- RF120C,可連接到 SIMATIC Ident 系統(tǒng),。
- 模塊 SM1278,,用于連接 IO-Link 傳感器和執(zhí)行器。
- 通過(guò)通信模塊實(shí)現(xiàn)點(diǎn)到點(diǎn)連接,。
PROFINET 接口
通過(guò)集成 PROFINET 接口,,可與以下設(shè)備通信:
- 編程設(shè)備
- HMI 設(shè)備
- 其它 SIMATIC 控制器
- PROFINET IO 自動(dòng)化組件
支持以下協(xié)議:
- TCP/IP
- ISO-on-TCP
- S7 通信
可連接以下設(shè)備:
- 通過(guò)標(biāo)準(zhǔn) 5 類電纜連接現(xiàn)場(chǎng)編程器和 PC。

在編程器和 SIMATIC S7-1200 的 CPU 之間建立連接
- SIMATIC HMI 精簡(jiǎn)面板

在精簡(jiǎn)面板和 SIMATIC S7-1200 的 CPU 之間建立連接
- 其它 SIMATIC S7-1200 控制器

通過(guò) CSM 1277 以太網(wǎng)交換機(jī)連接多臺(tái)設(shè)備
點(diǎn)到點(diǎn)接口,,可自由編程的接口模式
通信模塊可通過(guò)點(diǎn)到點(diǎn)連接進(jìn)行通信,。采用 RS232 和 RS485 物理傳輸介質(zhì)。在 CPU 的“自由口 (Freeport)”模式下進(jìn)行數(shù)據(jù)傳輸,。采用面向位的用戶特定通信協(xié)議(例如,ASCII 協(xié)議,、USS 或 Modbus),。
可以連接任何具有串行接口的終端設(shè)備,如驅(qū)動(dòng),、打印機(jī),、條碼讀碼器、調(diào)制解調(diào)器等,。

在可編程接口模式下,,通過(guò) CM 1241 實(shí)現(xiàn)點(diǎn)到點(diǎn)連接
S120的特點(diǎn)
SINAMICS S120是西門子公司推出的全新的集V/F、矢量控制及伺服控制于一體的驅(qū)動(dòng)控制系統(tǒng),,它不僅能控制普通的三相異步電動(dòng)機(jī),,還能控制同步電機(jī)、扭矩電機(jī)及直線電機(jī),。SINAMICS S120具有模塊化設(shè)計(jì),,可以提供高性能的單軸和雙軸驅(qū)動(dòng),功率范圍涵蓋0.12 kW – 4500 kW,,具有廣泛的工業(yè)應(yīng)用價(jià)值,。由于其具有很高的靈活性能,SINAMICS S120可以*的滿足應(yīng)用中日益增長(zhǎng)的對(duì)驅(qū)動(dòng)系統(tǒng)軸數(shù)量和性能的要求,。它具有以下特點(diǎn):
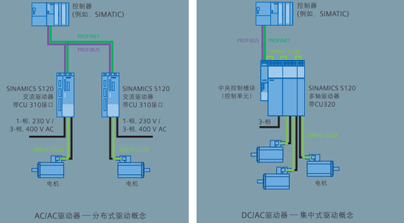
“高度靈活”的模塊化設(shè)計(jì)
允許不同功率等級(jí)與控制性能的單元自由組合,,所有系統(tǒng)組件之間都具有高度的兼容性,同時(shí)還可通過(guò)簡(jiǎn)單并聯(lián)就可實(shí)現(xiàn)功率的增容。

“一網(wǎng)到底”的通訊技術(shù)
上位通訊支持標(biāo)準(zhǔn)的 PROFIBUS DP 現(xiàn)場(chǎng)總線或新一代高速工業(yè)以太網(wǎng)技術(shù) PROFINET,,可以方便地集成到工廠 IT 環(huán)境,,傳動(dòng)組件之間采用*的DRIVE-CLiQ通訊。
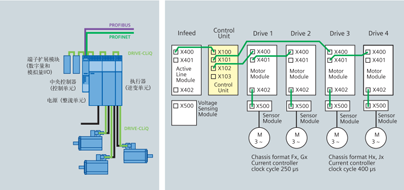
“一心多用”的多機(jī)控制技術(shù)
一個(gè)控制單元就可同時(shí)控制多達(dá)四臺(tái)逆變和一臺(tái)整流,,所需數(shù)據(jù)都保存在控制單元中,,在控制單元內(nèi)就能建立軸間連接和控制,保證系統(tǒng)高效可靠運(yùn)行,。
 西門子西北代理商
西門子西北代理商
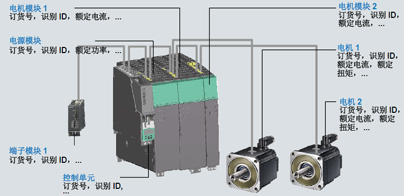
智能化的驅(qū)動(dòng)組件鏈路——DRIVE-CLiQ
基于網(wǎng)絡(luò)技術(shù)的全新傳動(dòng)串行通訊,,用于傳動(dòng)組件之間的通訊。DRIVE-CLIQ 組件都有一個(gè)電子銘牌,,各項(xiàng)技術(shù)數(shù)據(jù)都將自動(dòng)裝載到控制單元中,,從而讀取拓?fù)浣Y(jié)構(gòu),實(shí)現(xiàn) SINAMICS 驅(qū)動(dòng)系統(tǒng)的自動(dòng)配置,。
裝置并聯(lián)的“無(wú)環(huán)流設(shè)計(jì)”
由于選用了新一代高性能 IGBT 和*的均流控制技術(shù),,裝置并聯(lián)增容時(shí),只需滿足短電機(jī)電纜的要求就可,,而無(wú)需笨重而昂貴的平衡電抗或輸出電抗器,。
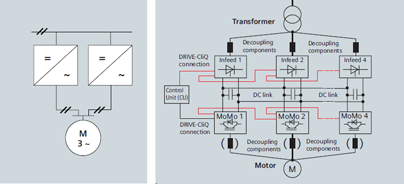
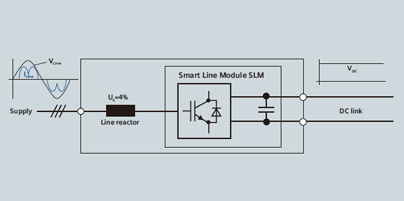
四象限運(yùn)行的“IGBT智能整流”
全新的 IGBT 整流 ——SLM,在實(shí)現(xiàn)四象限運(yùn)行的基礎(chǔ)上,,成功避免了換流故障,,又免除了傳統(tǒng)晶閘管正反橋整流/回饋所需的自耦變壓器,大大提高了傳動(dòng)系統(tǒng)的可靠性,。
1. 提出問(wèn)題
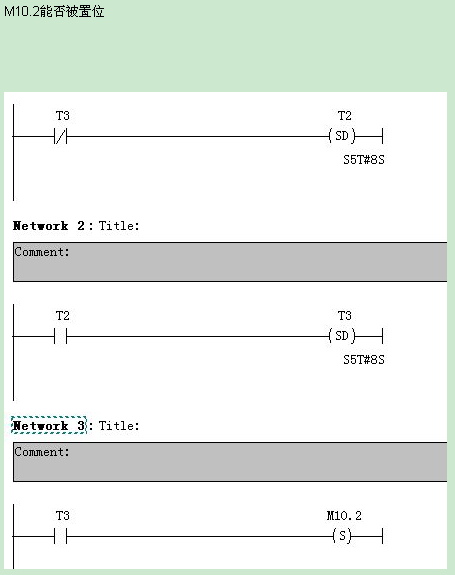
圖1
問(wèn)題1:M10.2能否被置位,?
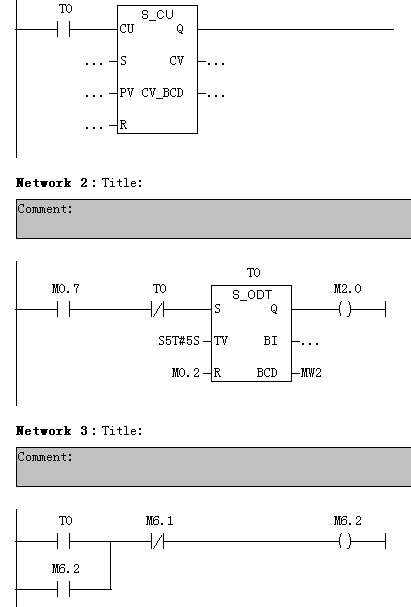
圖2
問(wèn)題2:S_CU計(jì)數(shù)有無(wú)問(wèn)題,M6.2能否被置位?
先來(lái)了解一下都有哪幾個(gè)計(jì)時(shí)器,,以及它們的特性如何
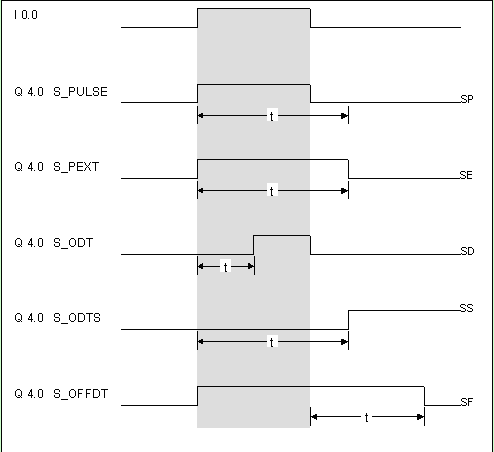
圖3
2. 計(jì)時(shí)器描述
從以圖3可以看出5個(gè)計(jì)時(shí)器的基本特性,,可以簡(jiǎn)單的從中挑選與控制工藝相符合的計(jì)時(shí)器使用,如果想了解計(jì)時(shí)器的詳細(xì)信息,,可以選擇計(jì)時(shí)器,,并按F1看幫助信息中的具體邏輯圖。
以計(jì)時(shí)器SD為例,,參見(jiàn)圖4
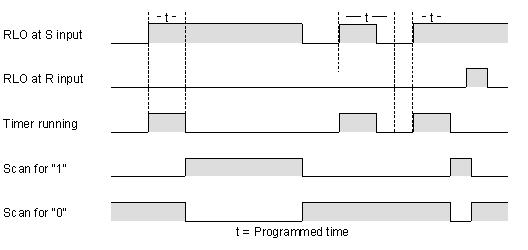
圖4
我們從中可以知道,,當(dāng)觸發(fā)端S的信號(hào)為上升沿時(shí),觸發(fā)計(jì)時(shí)器開(kāi)始運(yùn)行,,時(shí)間結(jié)束后計(jì)時(shí)器輸出端為1,,S信號(hào)為下降沿時(shí),計(jì)時(shí)器輸出端為0
那么根據(jù)此情況,,以圖1為例,,咱們可以把剛才的梯形圖程序通過(guò)時(shí)序圖表示如下圖5
其中a,b之間是在掃描此段程序兩個(gè)周期之間的間隙,。
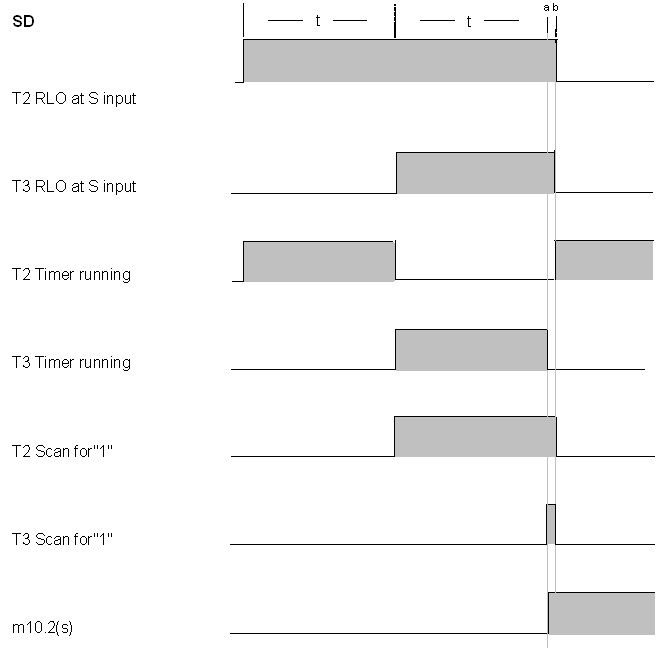
圖5
3. 計(jì)時(shí)器與循環(huán)程序的關(guān)系
經(jīng)過(guò)分析,可以看出,,M10.2(S)是可以被置位的,,那為什么沒(méi)有看見(jiàn)其被置位呢?
大家注意,,這里t的時(shí)間是8s,,我們知道,一個(gè)程序的掃描周期很短,,可能才十幾----幾十毫秒,,在線時(shí)候可以監(jiān)控到Scan Cycle Time。如圖6
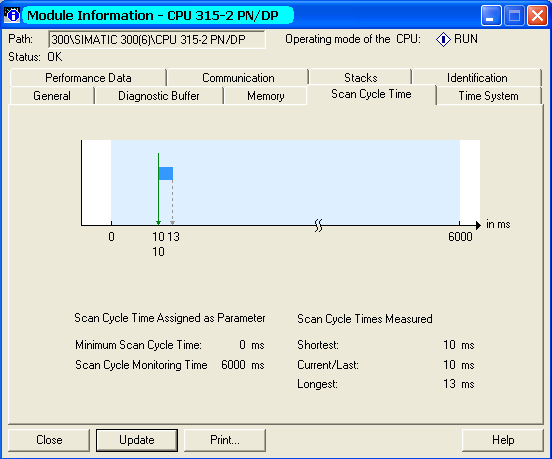
圖6
那這個(gè)時(shí)間不是遠(yuǎn)遠(yuǎn)超過(guò)了掃描周期么,?
我們又知道,,如果程序掃描周期大于大掃描周期監(jiān)控時(shí)間Scan Cycle Monitoring Time,那么將會(huì)觸發(fā)中斷,,甚至造成CPU進(jìn)入STOP狀態(tài),。
其實(shí),計(jì)時(shí)器的執(zhí)行是異步于OB1循環(huán)掃描的,,只要計(jì)時(shí)器運(yùn)行后,,在每一周期掃描到計(jì)時(shí)器的觸發(fā)端S信號(hào)如果為1,那么計(jì)時(shí)器就將在此周期繼續(xù)計(jì)時(shí),。因此,,它對(duì)于大周期監(jiān)控時(shí)間并沒(méi)有太大的影響,只是調(diào)用語(yǔ)句時(shí)占用了少許us的時(shí)間,。
怎么來(lái)驗(yàn)證這個(gè)說(shuō)法呢?就是說(shuō)計(jì)時(shí)器的執(zhí)行并不同步于OB1程序掃描周期,。
1,,可以在程序中加入若干SFC47增大程序掃描周期(保證小于Scan Cycle Monitoring Time),通過(guò)監(jiān)控計(jì)時(shí)器的時(shí)間,,可以看出,,計(jì)時(shí)器的時(shí)間是跳躍式的變化的,也就是說(shuō),,也就是說(shuō),,當(dāng)程序掃描完計(jì)時(shí)器,繼續(xù)往下進(jìn)行時(shí),,計(jì)時(shí)器滿足觸發(fā)條件進(jìn)行計(jì)時(shí),,此周期往后的計(jì)時(shí)是一直在進(jìn)行的。
2,,可以通過(guò)在中斷來(lái)證明
3,,通過(guò)程序死循環(huán)監(jiān)視計(jì)時(shí)證明
4,,通過(guò)多個(gè)計(jì)時(shí)器監(jiān)視時(shí)間來(lái)證明等等各種方法
那說(shuō)明了是異步的有何作用呢?
說(shuō)明了剛才咱們分析程序所作的時(shí)序圖有一定的問(wèn)題,,因?yàn)樵蹅兊姆治鍪前凑粘绦蛞徊讲酵逻M(jìn)行的,,相當(dāng)于是同步進(jìn)行的。而實(shí)際在程序執(zhí)行時(shí),,掃描周期是比較短的,,所以計(jì)時(shí)器是在其中的某一個(gè)周期里計(jì)時(shí)器計(jì)時(shí)結(jié)束時(shí)輸出被置位為1,,那么因?yàn)檫@樣,,所以對(duì)我們編寫程序就會(huì)有一定的要求。也就有了下面一個(gè)問(wèn)題
4. 計(jì)時(shí)器動(dòng)作的時(shí)刻
計(jì)時(shí)器的輸出端是什么時(shí)候被置位呢,,什么時(shí)候起作用呢,,比如 ,?
,?
是等到重新掃描到計(jì)時(shí)器塊,計(jì)時(shí)器執(zhí)行完畢才置位,,還是不用重新掃描到計(jì)時(shí)器,?程序中直接掃描的T40節(jié)點(diǎn),它就已經(jīng)被置位了呢,?
1,,我們可以設(shè)置OB35的看門狗時(shí)間為2000ms, 如圖7
OB35里觸發(fā)計(jì)時(shí)器T40, 的開(kāi)點(diǎn)給線圈M6.0,,如圖8
的開(kāi)點(diǎn)給線圈M6.0,,如圖8
OB1里 的開(kāi)點(diǎn)給線圈M6.1,,M6.0開(kāi)點(diǎn)給線圈M6.2,如圖9
的開(kāi)點(diǎn)給線圈M6.1,,M6.0開(kāi)點(diǎn)給線圈M6.2,如圖9
經(jīng)過(guò)試驗(yàn),,觀察看到,,當(dāng)T40的Timer運(yùn)行結(jié)束后M6.1立刻就被置位了,而M6.0和M6.2會(huì)等到再次掃描到OB35,,才會(huì)被置位,。
可得出結(jié)論,當(dāng)計(jì)時(shí)器T40計(jì)時(shí)結(jié)束時(shí),,CPU掃描到 時(shí),,它就已經(jīng)為1了,不需要等到掃描計(jì)時(shí)器S_ODT(SD),。
時(shí),,它就已經(jīng)為1了,不需要等到掃描計(jì)時(shí)器S_ODT(SD),。
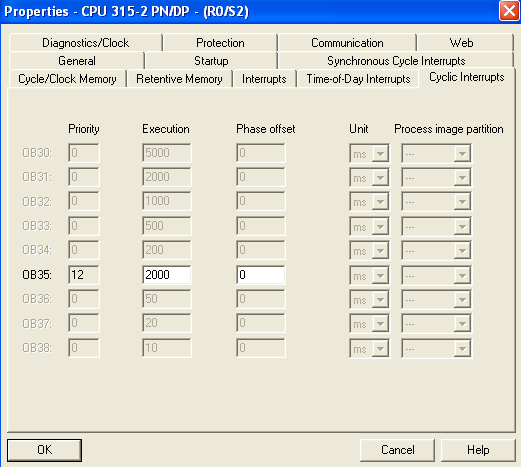
圖7
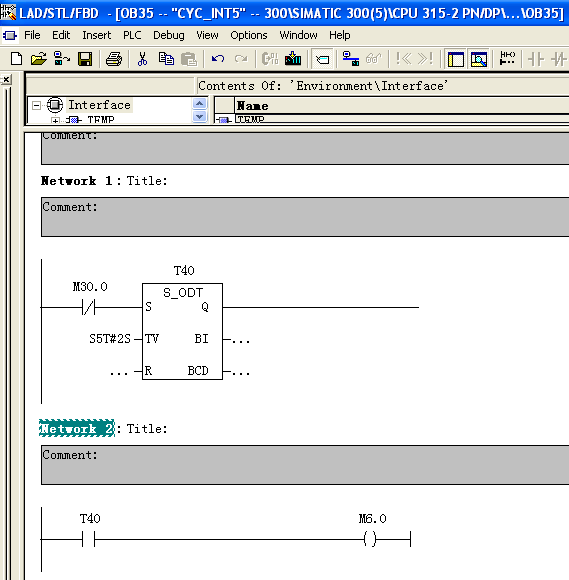
圖8
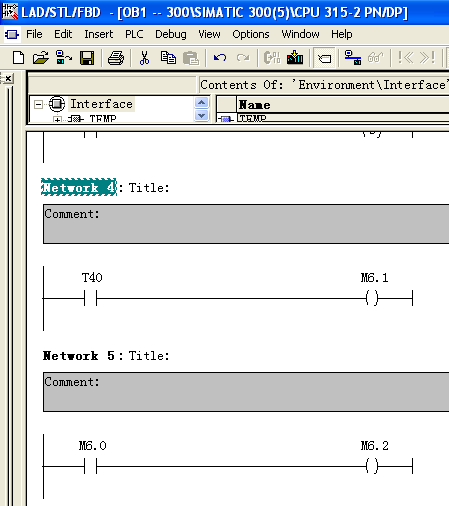
圖9
2,,也可以在OB1里調(diào)用多個(gè)“wait”代碼讓OB1的掃描周期足夠大,如5s,,先調(diào)用一個(gè)SD T2 1s,,然后調(diào)用若干“wait”,大概持續(xù)2s,,用T2開(kāi)點(diǎn)觸發(fā)一個(gè)線圈如M10.0,,再調(diào)用若干“wait”,,大概1s,然后再調(diào)用一個(gè)SD T3,,可以看出再T3還沒(méi)有開(kāi)始計(jì)數(shù)時(shí),,M10.0已經(jīng)被置位了。
計(jì)時(shí)器在OB30—OB38里呢,?
是一樣的,。
可以在OB35里使用SD計(jì)時(shí)器,可以發(fā)現(xiàn),,當(dāng)程序調(diào)用OB35時(shí),,計(jì)時(shí)器開(kāi)始運(yùn)行,把OB35執(zhí)行時(shí)間和計(jì)時(shí)器時(shí)間設(shè)置大些,,可以發(fā)現(xiàn),,只要每次在掃描的計(jì)時(shí)器觸發(fā)端時(shí),條件滿足,,計(jì)時(shí)器就開(kāi)始運(yùn)行,,直到下一次掃描OB35時(shí)再掃描到此條件為止。
可以把計(jì)時(shí)器時(shí)間設(shè)置足夠大,,當(dāng)計(jì)時(shí)未結(jié)束前把它的觸發(fā)端變?yōu)?,,那么其計(jì)時(shí)停止,直到再次觸發(fā),。
可以得出計(jì)時(shí)器的運(yùn)行只與每次掃描到它的觸發(fā)端有關(guān),。掃描完觸發(fā)端后,計(jì)時(shí)器的運(yùn)行就與觸發(fā)端無(wú)關(guān)了,,直到下一次再次掃描到此觸發(fā)端,。
5. 分析程序
了解了以上的一些基本知識(shí),咱們?cè)賮?lái)看看剛才圖1中的程序,。
一個(gè)CPU的掃描周期是可以計(jì)算的,,根據(jù)不同的配置和數(shù)據(jù)的讀取,可以計(jì)算出不同的周期,,在PLC運(yùn)行時(shí),每個(gè)周期的大小也是不一樣的,,可以大致計(jì)算出范圍,,可以根據(jù)每條語(yǔ)句來(lái)計(jì)算程序的執(zhí)行時(shí)間,再加上相應(yīng)的循環(huán)周期檢測(cè)點(diǎn),,周期中斷,,訪問(wèn)過(guò)程映像區(qū),通信負(fù)載等,。這些時(shí)間的長(zhǎng)短與CPU型號(hào)及使用方式有關(guān),。
使用PS307 5A,,CPU315-2PN/DP (315-2EH13-0AB0 V 2.6.50)為例。以下所有時(shí)間都以此配置為標(biāo)準(zhǔn),。
我們把圖1的梯型圖換成語(yǔ)句表來(lái)分析指令執(zhí)行的過(guò)程,。
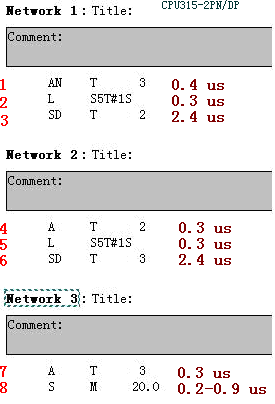
圖10
一個(gè)CPU的掃描周期的計(jì)算可以根據(jù)以下幾個(gè)過(guò)程來(lái)進(jìn)行
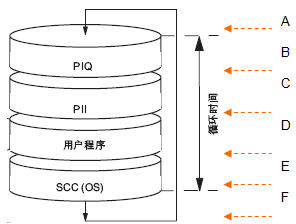
圖11
A.操作系統(tǒng)初始化循環(huán)時(shí)間監(jiān)視
B.掃描PIO
C.掃描PII
D.執(zhí)行用戶程序,并執(zhí)行程序中定義的操作
E.掃描周期檢測(cè)點(diǎn)操作系統(tǒng)時(shí)間(周期結(jié)束時(shí)執(zhí)行掛起的任務(wù),,如裝載和刪除塊)
F .CPU返回到周期開(kāi)始的時(shí)間點(diǎn),,并重新開(kāi)始循環(huán)周期監(jiān)視
在以上的步驟中都是有時(shí)間的,雖然很小,,但是也占用時(shí)間,。可以根據(jù)不同的硬件組態(tài),,參照
CPU Specifications手冊(cè)進(jìn)行計(jì)算,,
為了便于計(jì)算和理解,咱們以理想狀態(tài)來(lái)計(jì)算,。假設(shè)CPU周期中的A,,B,C,,E,,F(xiàn)的時(shí)間為固定的數(shù)值X us。
只分析程序里的”D” --用戶程序中的命令執(zhí)行,。
程序是順序掃描的,,從Network 1—3依次進(jìn)行,
以*個(gè)周期開(kāi)始時(shí)來(lái)分析,,首先掃描Network 1中T3計(jì)時(shí)器為0,,因此閉點(diǎn)使能,T2開(kāi)始計(jì)時(shí)(0-8S),,但此時(shí)掃描T2輸出為0,,
因此掃描到Network 2中T2開(kāi)點(diǎn)不使能,掃描到T3不執(zhí)行,,
Network 3中T3開(kāi)點(diǎn)不使能,,M10.2為0。
到此過(guò)程[0.4+0.3+2.4+0.3+0.3+2.4+0.3+0.2(或0.9)] us = 6.6 (或7.3) us,。
注意:T2一直在累加時(shí)間,,相當(dāng)于此時(shí)T2計(jì)時(shí)也到達(dá)6.6(或7.7)us。
然后加上剛才的時(shí)間X us,,那么一個(gè)周期可以認(rèn)為是t=X+6.6 (7.7) us,。X大于7 us,可以看出語(yǔ)句的執(zhí)行是在很短的時(shí)刻進(jìn)行,,所以大家在編程時(shí)常用的每個(gè)計(jì)時(shí)器都會(huì)經(jīng)過(guò)若干個(gè)程序掃描周期,。
因?yàn)門imer是異步的,,所以T2的時(shí)間應(yīng)該在一個(gè)周期里也為t=X+6.6 (7.7) us,那么根據(jù)上面的程序看,,因?yàn)門2設(shè)置為8s,,所以應(yīng)該在大概m=8s/[ X+6.6 (7.7)]us個(gè)周期時(shí),T2執(zhí)行完畢,。
T2 假設(shè)優(yōu)秀情況下,,T2執(zhí)行完畢的時(shí)刻是在第m個(gè)周期內(nèi),
A.如果發(fā)生在Network2的T2開(kāi)點(diǎn)之前,,那么掃描到此 T2開(kāi)點(diǎn)的語(yǔ)句時(shí),,T2的輸出變?yōu)?,執(zhí)行下一條語(yǔ)句T2開(kāi)點(diǎn)就會(huì)閉合,,T3開(kāi)始計(jì)時(shí),。
B.如果T2執(zhí)行完畢的時(shí)刻是程序掃描到T2開(kāi)點(diǎn)語(yǔ)句之后才發(fā)生的,那么因?yàn)楹竺娴某绦驔](méi)有對(duì)T2的操作,,只有在下一個(gè)m+1周期,,才能檢測(cè)到T2的變化。T3開(kāi)始計(jì)時(shí),。
T3開(kāi)始計(jì)時(shí)的前提條件是T2開(kāi)點(diǎn)閉合,,假設(shè)在第m個(gè)周期里,T3開(kāi)始計(jì)時(shí),,那么同樣,,要經(jīng)過(guò)大概m個(gè)周期左右,T3才能執(zhí)行完畢,,到此時(shí),,已經(jīng)經(jīng)過(guò)了2m個(gè)周期,因?yàn)镸10.2線圈是由T3開(kāi)點(diǎn)的閉合信號(hào)來(lái)置位的,,那么現(xiàn)在就來(lái)分析一下什么時(shí)候可以發(fā)生此動(dòng)作,。
注意:在此例子程序中,在Network1-3中都有對(duì)T3的操作
T3 假設(shè)在優(yōu)秀情況下,,T3執(zhí)行完畢的時(shí)刻是在第2m個(gè)周期,。在第2m周期內(nèi)
A.如果發(fā)生在Network1的T3閉點(diǎn)之前,那么在程序掃描到T3閉點(diǎn)的時(shí)候,,T3的輸出值已經(jīng)變?yōu)?了,,閉點(diǎn)變?yōu)殚_(kāi)點(diǎn),T2輸出變?yōu)?,,往下掃描到Network2的T2開(kāi)點(diǎn)變?yōu)?,T3的SD輸出也變?yōu)?,,繼續(xù)掃描到Network3,,T3開(kāi)點(diǎn)為0,,那么M10.2未被置位。
B.如果發(fā)生在Network1的T3閉點(diǎn)之后,,Network3的T3開(kāi)點(diǎn)之前,,(則T2是保持為1的),在掃描到T3開(kāi)點(diǎn)時(shí),,T3的輸出值變?yōu)?,,T3開(kāi)點(diǎn)變?yōu)殚]點(diǎn),M10.2被置位,。
C.如果發(fā)生在Network3的T3開(kāi)點(diǎn)之后,,那么在此周期內(nèi)對(duì)m10.2不會(huì)產(chǎn)生置位,在下一周期(2m+1),T3輸出值變?yōu)?了,,所以在Network1里T3閉點(diǎn)變?yōu)殚_(kāi)點(diǎn),,T2輸出變?yōu)?,掃描到Network2里,,T2開(kāi)點(diǎn)變?yōu)?,,導(dǎo)致T3輸出值變?yōu)?,掃描到Network3里,,T3開(kāi)點(diǎn)變
,。

 化工儀器網(wǎng)
化工儀器網(wǎng)