 化工儀器網(wǎng)
化工儀器網(wǎng)










詳細(xì)介紹
西門子CPU標(biāo)準(zhǔn)型6ES7315-2AH14-0AB0應(yīng)用簡述:AGV是無人搬運車(Automated Guided Vehicle)的英文縮寫。是指裝備有電磁或光學(xué)等自動導(dǎo)引裝置,,能夠沿規(guī)定的導(dǎo)引路徑行駛,,具有安全保護以及各種移載功能的運輸車,AGV屬于輪式移動機器人(WMR――Wheeled Mobile Robot)的范疇,。AGV以輪式移動為特征,,較之步行、爬行或其它非輪式的移動機器人具有行動快捷,、工作效率高,、結(jié)構(gòu)簡單、可控性強,、安全性好等優(yōu)勢,。與物料輸送中常用的其他設(shè)備相比,AGV的活動區(qū)域無需鋪設(shè)軌道,、支座架等固定裝置,,不受場地、道路和空間的限制,。因此,,在自動化物流系統(tǒng)中,,能充分地體現(xiàn)其自動性和柔性,實現(xiàn)高效,、經(jīng)濟,、靈活的無人化生產(chǎn)。廣泛應(yīng)用于汽車制造,、機械,、電子、鋼鐵,、化工,、醫(yī)藥、印刷,、倉儲,、運輸業(yè)和商業(yè)上。
2.AGV中央調(diào)度系統(tǒng),,AGV控制系統(tǒng)包括車上控制器和中央調(diào)度控制系統(tǒng),,均采用智能數(shù)字控制器,通過無線通信進行聯(lián)系,。AGV的控制指令由中央調(diào)度系統(tǒng)發(fā)出(PLC),,存入車載控制器(單片機);AGV運行時,,車上控制器通過通信系統(tǒng)從地面站接受指令并報告自己的狀態(tài),。車上控制器可完成以下監(jiān)控:手動控制、安全裝置啟動,、蓄電池狀態(tài),、轉(zhuǎn)向極限、制動器解脫,、行走燈光,、驅(qū)動和轉(zhuǎn)向電機控制與充電接觸器的監(jiān)控等。中央調(diào)度系統(tǒng)與AGV間可采用定點光導(dǎo)通訊和無線局域網(wǎng)通訊兩種通訊方式,。采用無線通訊方式時,,控制臺和AGV構(gòu)成無線局域通訊網(wǎng),控制臺和AGV在網(wǎng)絡(luò)協(xié)議支持下交換信息,。無線通訊要完成AGV的調(diào)度和交通管理,。
3.為了實現(xiàn)AGV中央調(diào)度的目的,項目組采用今年6月在中華工控網(wǎng)體驗項目中申請的“S7-200SMART智能邏輯控制器”開展了該項目的研究開發(fā)工作,。由于西門子S7-200SMART輯控制器的較強通信能力,,該控制系統(tǒng)經(jīng)過2個月的開發(fā),改進,,已經(jīng)實現(xiàn)了通過串口自由通信,,以及MODBUS,,無線局域網(wǎng)通信等手段控制多臺AGV的調(diào)度控制,實現(xiàn)AGV啟動,,停止,,路徑計算規(guī)劃,站點???,物料對接,多任務(wù)下發(fā),,遠(yuǎn)程控制等功能,。西門子S7-200SMART的強大通信功能,以及方便的順序控制功能,,有利AGV系統(tǒng)功能的擴展很更改,,獲得了研發(fā)人員,以及用戶的*好評,。
4.天津申能科技有限公司,,是一家高科技企業(yè),,是天津市單片機學(xué)會理事單位,。公司以推廣*工業(yè)信息化、自動化技術(shù)為使命,,以專業(yè)打造智能化,、無人化工廠為目標(biāo),公司致力于AGV及現(xiàn)代物流和工業(yè)機器人的開發(fā)與應(yīng)用,、非標(biāo)自動系列設(shè)備設(shè)計,,規(guī)劃,安裝,,調(diào)試,、并從遠(yuǎn)程工業(yè)控制技術(shù)的開發(fā)和應(yīng)用,真正幫助企業(yè)實現(xiàn)數(shù)字化工廠,。
二,、工藝原理
1. 應(yīng)用功能描述:
AGV是無人搬運車(Automated Guided Vehicle)的英文縮寫,AGV小車系統(tǒng)涉及機械,、電子,、光學(xué)、計算機等多個領(lǐng)域,。AGV大的特點是無人引導(dǎo)運輸,,就是自動在工廠中行走,多臺AGV在一起運行時,,為了避免發(fā)生路線沖突,,發(fā)生碰撞等事故,,就需要一臺管控系統(tǒng),我們稱之其為中央調(diào)度系統(tǒng),。中央調(diào)度系統(tǒng)的核心就是中央控制器,,負(fù)責(zé)AGV路線規(guī)劃,任務(wù)下發(fā),,報警處理,,無限呼叫,以及配套伺服電機,,氣缸等控制,。在中小型的AGV控制系統(tǒng)中一般采用PLC作為主機。在本次項目中我們采用了西門子S7-200SMART作為中央控制器,,利用其自由通信,。MODBUS通信兩種通信方式,將控制命令通過無線局域網(wǎng)及WiFi發(fā)送給AGV,,實現(xiàn)了中央調(diào)度系統(tǒng)的功能,。
2. 系統(tǒng)組成及工作流程:
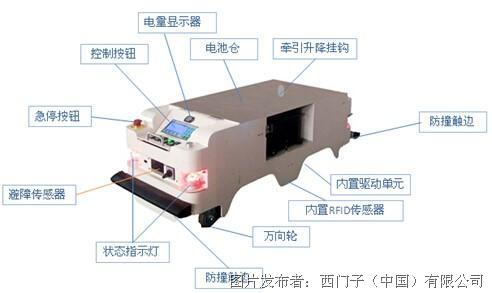
AGV中央調(diào)度系統(tǒng)主要由中央控制系統(tǒng),AGV,,人際交互系統(tǒng)三大部分組成,,其中中央控制系統(tǒng)包括PLC,電源模塊,保險裝置,,無限網(wǎng)絡(luò)模塊,,繼電器,等電器件,。AGV包括,,臺車(帶自動升降銷), AGV控制單元、蓄電池,、電池推車及電池托架等組成,,人機交互系統(tǒng)包括,顯示器,,工控機,,鍵鼠,交換機等,。
 西門子CPU標(biāo)準(zhǔn)型6ES7315-2AH14-0AB0
西門子CPU標(biāo)準(zhǔn)型6ES7315-2AH14-0AB0
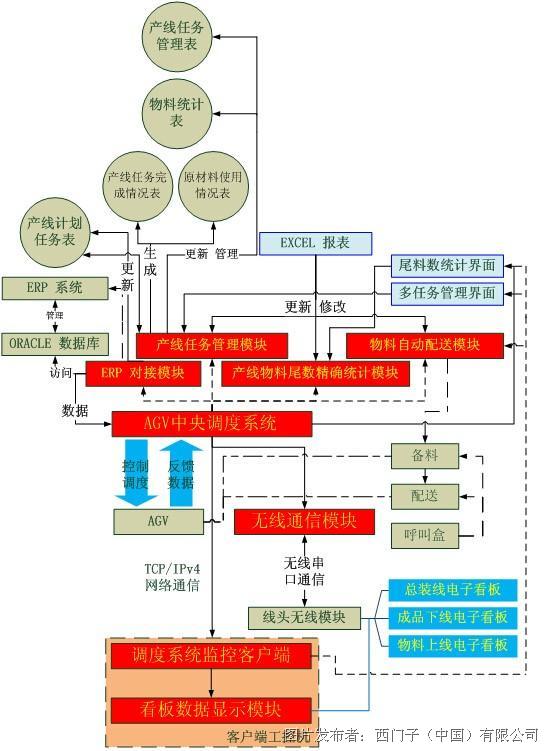
工作流程是:以上路程圖就是系統(tǒng)的工作流程,。
3.系統(tǒng)需要分析:
該系統(tǒng)通過框架圖可以看出,由于整個控制過程主要是通信控制,,所以PLC的通信能力需要很強,。西門子S7-200SMART具有兩個通信口,還可以擴展一個RS232或者RS485接口,,利用其較強的通信能力,,和順序控制能力,,展開了項目設(shè)計,實施,,以及調(diào)試工作,。
三、方案選型
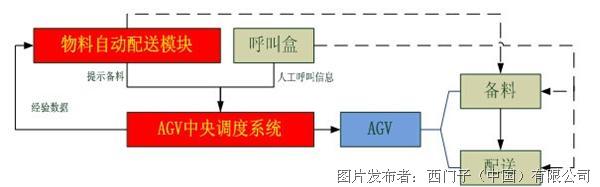
本系統(tǒng)使用西門子S7-200SMART作為數(shù)據(jù)交換,,控制的核心,,通過WiFi和AGV車通信連接,AGV車將當(dāng)前的狀態(tài),,比如位置,,速度,目標(biāo)地址,,電量多少等數(shù)據(jù)通過自由通信的方式回傳給PLC,,PLC根據(jù)回傳的數(shù)據(jù)加以判讀,然后管控AGV的路線,,速度,,啟停,以及行進目標(biāo)等,。通過已經(jīng)建立好的無限局域網(wǎng),,以自由通信的方式下發(fā)給相應(yīng)的AGV,AGV接收到這些指令之后開始執(zhí)行。調(diào)度系統(tǒng)有時間會接受呼叫系統(tǒng)的命令,,呼叫系統(tǒng)會傳送命令給調(diào)度系統(tǒng),,調(diào)度系統(tǒng)會指派相應(yīng)的AGV去相應(yīng)的位置,,完成相應(yīng)的動作及任務(wù),。這樣調(diào)度系統(tǒng)就完成了AGV基本的調(diào)度。
功能圖如下:
四,,編程與調(diào)試
1. I/O分配表
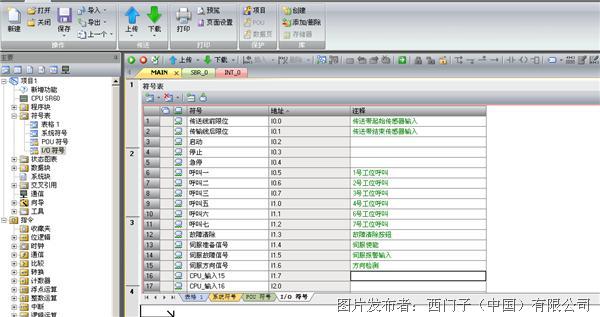
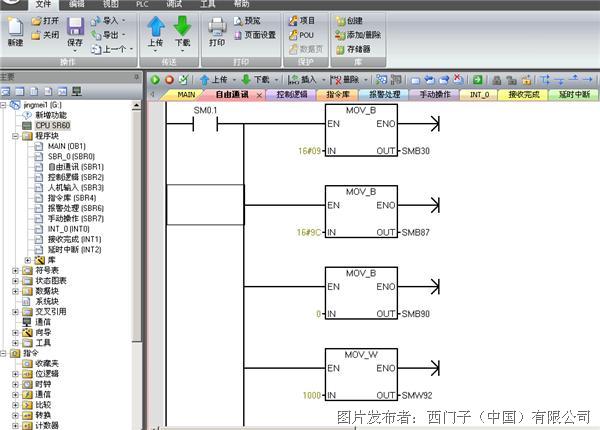
2.西門子S7-200SMART控制程序說明
本項目針對的AGV調(diào)度控制,,主要是MOUBUS通信,以及自由口通信,。這些通信是連接AGV以及無線呼叫器的樞紐,,沒有他們AGV將失控,無線呼叫器也無發(fā)送信號,。在本項目組中,,連接通信口的都是通過無限局域網(wǎng)和下位機連接的。

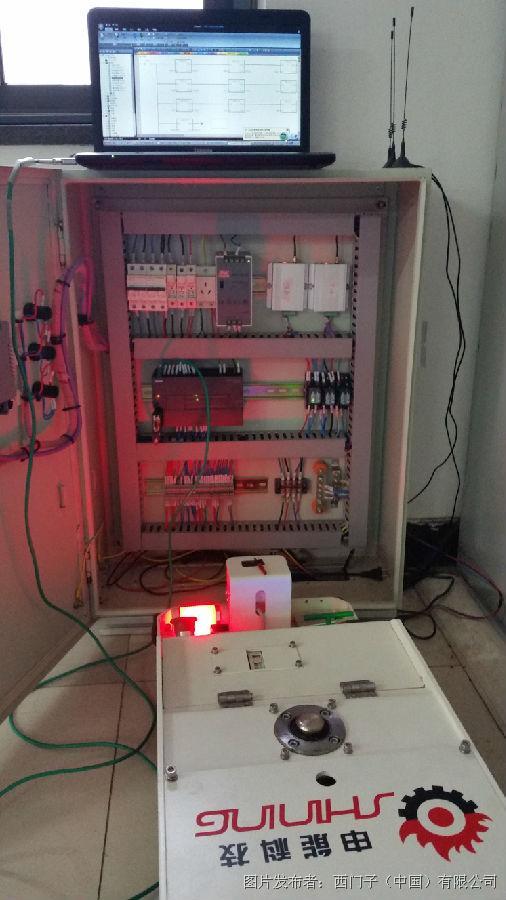
3 應(yīng)用設(shè)備圖片展示
調(diào)度控制柜現(xiàn)場照片
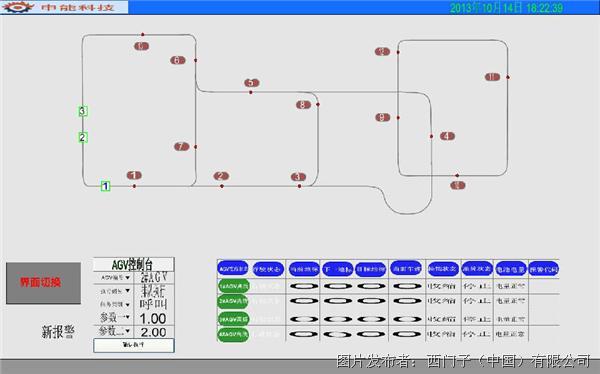
調(diào)度系統(tǒng),,皮帶線,,以及AGV路線圖展示

AGV靜態(tài)展示

調(diào)度人機界面展示
五、應(yīng)用體會
在本項目研究中,,西門子S7-200SMART作為AGV調(diào)度系統(tǒng)核心硬件之一,,發(fā)揮出了它的極大優(yōu)勢,,在在中小型調(diào)度系統(tǒng)中其表現(xiàn)出了很多優(yōu)勢,比如編程界面簡潔有條理,,結(jié)構(gòu)化編程,,程序員很容易上手,豐富的應(yīng)用指令,,浮點數(shù)PID,,CPU集成2個通信口,擴展一個通信口,,以及緊湊的結(jié)構(gòu)都是令人喜愛的原因,。
1.西門子S7-200SMART實際工控應(yīng)用中,與以往我們用的西門子S7200PLC相比,,節(jié)省了一個通信擴展模塊,,節(jié)省了空間和費用,同時增加以太網(wǎng)接口,,也增加調(diào)度AGV小車的數(shù)量,。西門子S7-200SMART還具有非常好的可擴展性,需要增添,、修改功能時,,能夠非常靈活地進行操作而幾乎不影響現(xiàn)有的控制方案,在中小規(guī)模的控制系統(tǒng)中表現(xiàn)出了極大的優(yōu)勢,。
2.這次研制中也發(fā)現(xiàn)了一些不足,,硬件方面比如去掉了S7-200以往的狀態(tài)開關(guān),在實際調(diào)試的過程中帶來了不方便,,同時外形體積什么較以往加寬等,。
3.軟件編程方面也有一些不足,比如I/O符號表必須要提前設(shè)定,,不能在編輯時候在編輯處修改,,軟件在實際使用的時候發(fā)現(xiàn)不夠穩(wěn)定,希望能夠發(fā)布新版本,。
4.對于一些位置控制較多,,以及通信需求較多的應(yīng)用場合,西門子S7-200SMART有極大的優(yōu)勢,。

 化工儀器網(wǎng)
化工儀器網(wǎng)