1 前序
高光譜成像作為一種新型的光譜成像技術(shù),,在海洋生態(tài)監(jiān)測領(lǐng)域中充分展現(xiàn)了其自身的技術(shù)優(yōu)勢,。由于高光譜成像光譜儀具有光譜覆蓋范圍廣、分辨率高和波段多,、圖譜合一等優(yōu)點,,因此已成為海洋總氮、總磷等的有效監(jiān)測手段,。它既可用于海水中高錳酸鹽濃度,、懸浮泥沙含量、某些污染物和表層水溫探測,,還可用于海冰,、海岸帶等地表的探測。
國內(nèi)海洋遙感應(yīng)用基礎(chǔ)研究主要是一些數(shù)學(xué)模型的構(gòu)建,。在海洋水質(zhì)監(jiān)測應(yīng)用方面,,只有可見光波段的光譜能夠觀測水下的狀況。另外,,陸源污染,、海水養(yǎng)殖、灘涂等海岸帶典型要素的光譜特性研究工作也在開展,,研究人員以航空/衛(wèi)星的高光譜圖像為數(shù)據(jù)源,,選取陸源污染、海水養(yǎng)殖,、灘涂為監(jiān)測要素,,進(jìn)行上述要素的光譜波段敏感性研究,獲得其探測的最佳波段,,并進(jìn)一步發(fā)展準(zhǔn)確,、快速識別和探測技術(shù)。在海洋表面溫度測量,、海洋表層懸浮泥沙濃度的定性或半定量的觀測,、海洋動力現(xiàn)象的研究等方面都開展了相應(yīng)的研究,。通過水質(zhì)遙感監(jiān)測分析水體反射光譜特征與水質(zhì)參數(shù)濃度之間的關(guān)系,,建立水質(zhì)參數(shù)的反演算法。這是一種不僅省時省力,,而且還可以利用衛(wèi)星影像進(jìn)行全面,、及時的水質(zhì)監(jiān)測的方法。
2 材料與試驗部分
野外試驗飛行總共為兩次,均在中國的某段海面上進(jìn)行,。
2.2 數(shù)據(jù)采集設(shè)備
本次試驗采用大疆六旋翼無人機(jī)M600 Pro(無人機(jī)凈重約4 kg,,最大載重約 10 kg),在無人機(jī)遙感平臺上搭載江蘇雙利合譜科技有限公司自主研發(fā)的高光譜成像光譜儀GaiaSky-mini-2,,該成像系統(tǒng)采用擁有自主知識產(chǎn)權(quán)的內(nèi)置推掃方式獲取地面圖像(其主要參數(shù)見表1),。無人機(jī)的飛行高度均為300m,分別采集了33景和37景圖像,,無人機(jī)遙感平臺的實景圖如圖1所示,。
表1 GaiaSky-mini2 無人機(jī)載成像高光譜儀系統(tǒng)參數(shù)
| 序號 | 項目 | 參數(shù) |
| 1 | 光譜掃描范圍/nm | 400~1000 |
| 2 | 光譜分辨率/nm | 3.5 nm |
| 3 | 成像鏡頭/mm | 18.5 |
| 4 | 光譜通道數(shù) | 360 |
| 5 | 全幅像素 | 1936×1456 |
| 6 | 傳感器 | CCD Sony ICX 674 |

圖1 無人機(jī)高光譜成像系統(tǒng)實景圖
2.3 無人機(jī)高光譜數(shù)據(jù)的預(yù)處理與分析
無人機(jī)高光譜圖像的預(yù)處理在江蘇雙利合譜科技有限公司自主研發(fā)的SpecView軟件中進(jìn)行,包括鏡像變換,、黑白幀校準(zhǔn)(如公式1所示),。
 (1)
(1)
式中,Rref 是黑白校正過的圖像的反射率值,,DNraw 是原始圖像的DN值,,DNwhite為白板的白幀數(shù)據(jù),DNdark 是相機(jī)的系統(tǒng)誤差DN值,。
考慮到無人機(jī)飛到一定高度后,,高光譜成像儀獲取的高光譜影像數(shù)據(jù)可能會受到大氣、水汽等因素的影響,。為了消除這些因素的影響,,我們(系統(tǒng))在無人機(jī)起飛之前,在拍攝區(qū)域放置一塊經(jīng)過國家計量院標(biāo)定過的2m*2m灰布,,在高光譜影像獲取的時候,,只需要在其中的一景高光譜影像中覆蓋到灰布即可。消除大氣,、水汽等因素影響的方法如公式2所示,。
 (2)
(2)
式中,Rfixed 是消除大氣,、水汽等因素后的圖像光譜反射率,,Rref是經(jīng)過黑白校正后的圖像反射率,Rstandard是經(jīng)過國家計量院標(biāo)定的灰布的光譜反射率,,Rgrayref 是經(jīng)過黑白校正后圖像中灰布的光譜反射率,。
2.4 無人機(jī)高光譜影像拼接
無人機(jī)高光譜影像的拼接采用江蘇雙利合譜科技有限公司自主研發(fā)的無人機(jī)高光譜拼接軟件SpecStitcher進(jìn)行拼接,該拼接軟件有圖像篩選,、拼接預(yù)覽,、投影方式選擇、拼接方法選擇,、重采樣方法選擇,、是否勻色,、拼接結(jié)果格式輸出選擇等功能。拼接軟件界面如圖2所示,。
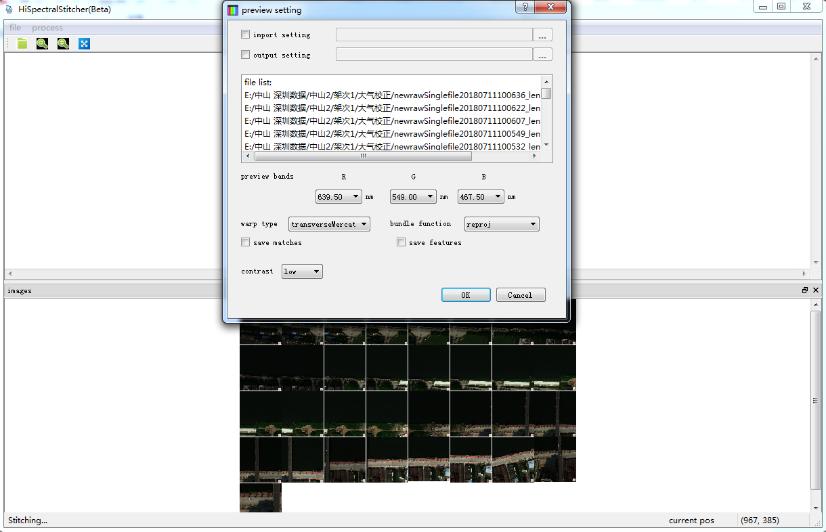
圖2 無人機(jī)高光譜拼接軟件SpecStitcher
3 結(jié)果與分析
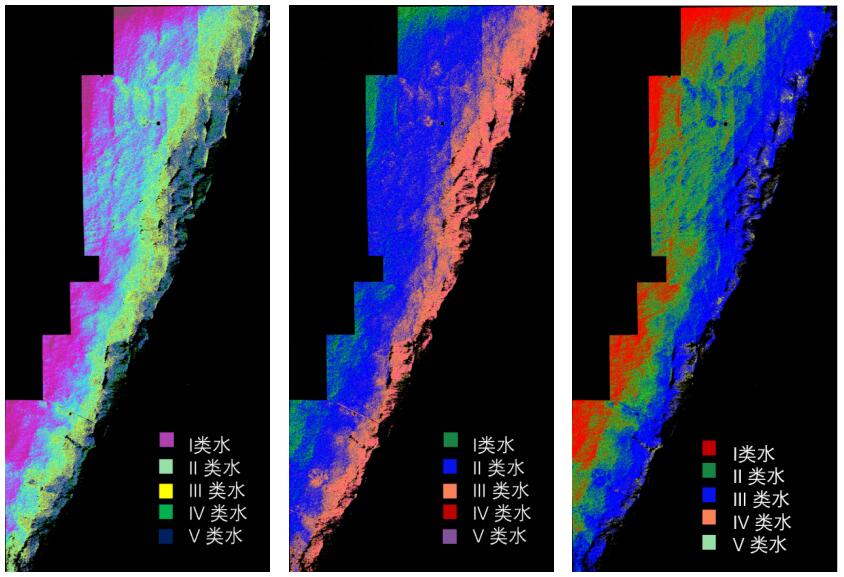
圖3.1(左)及圖3.2(左)為利用無人機(jī)高光譜拼接軟件SpecStitcher對海面及其海岸的無人機(jī)高光譜影像的三波段拼接效果預(yù)覽圖(RGB分別代表640 nm/550 nm/460 nm最鄰近波長),。從拼接結(jié)果來看,第一次與第二次采集到的海面影像數(shù)據(jù)拼接效果較好,。提取出陸地和海水的光譜曲線如圖3所示。
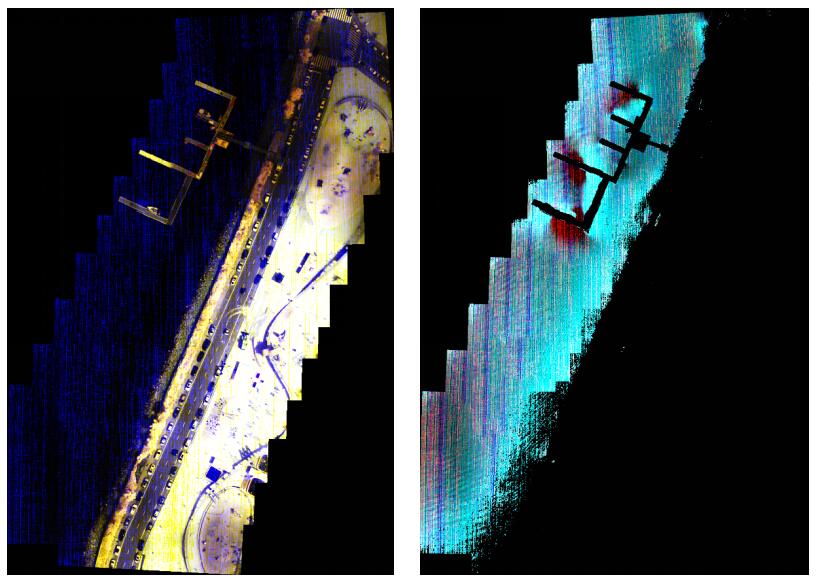
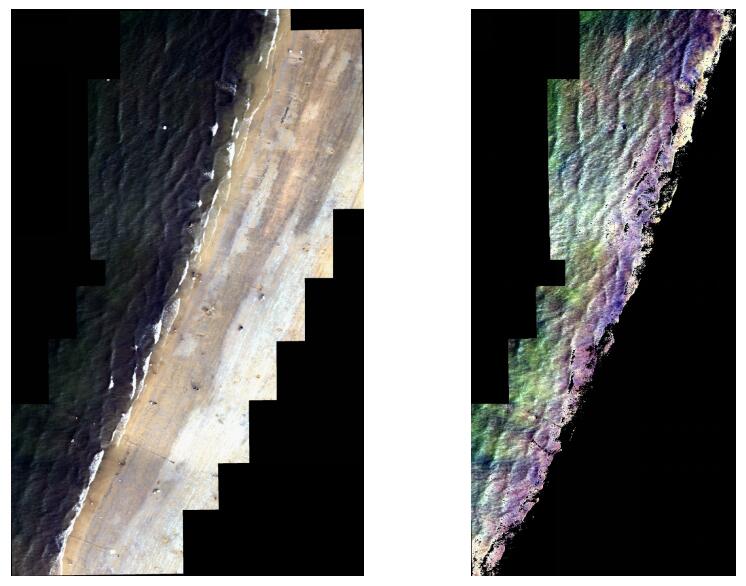
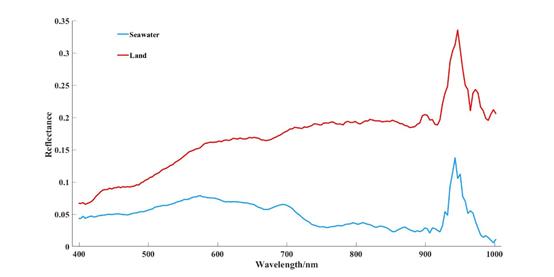
圖4 海水與陸地光譜對比
無人機(jī)高光譜影像不僅包含有河流,還有其他的樹木,、雜草,、土壤、道路,、建筑物等,,從影像中提取感興趣的目標(biāo)物,通常的方法有非監(jiān)督分類,、監(jiān)督分類,、決策樹、面向?qū)ο蠓诸惖?,本研究采用監(jiān)督分類的馬氏距離法對拼接好的無人機(jī)高光譜影像進(jìn)行分類,,從而提取了兩次數(shù)據(jù)中的海水信息,并對第二次海水進(jìn)行可見總氧,、總磷和高錳酸鹽等水質(zhì)參數(shù)的反演,。兩次飛行提取出的海水信息如圖3.1(右)及圖3.2(右)所示。
3.2 無人機(jī)高光譜影像河流提取方法
3.3 總氮,、總磷和高錳酸鹽的反演
水體中總氮,、總磷和高錳酸鹽含量是衡量水質(zhì)的重要指標(biāo)。常規(guī)氮磷和高錳酸鹽的測量方法需要長時間的高溫,、高壓消解,,且消解的溫度、時間和試劑對測定的結(jié)果均有較大的影響,,整個操作煩瑣,、費時和耗力;因此本研究試圖利用高光譜遙感技術(shù),,通過對水體中氮,、磷和高錳酸鹽光譜的測定,探索水體氮,、磷和高錳酸鹽與反射光譜特征的關(guān)系,,建立氮,、磷濃度和高錳酸鹽的反演模型,,為湖泊,、水庫和河流等大型內(nèi)陸水體氮磷及高錳酸鹽遙感定量監(jiān)測提供理論依據(jù)。目前的一些研究僅根據(jù)總氮,、總磷,、高錳酸鹽與海水水質(zhì)之間具有的密切相關(guān)關(guān)系,建立總氮,、總磷和高錳酸鹽的遙感信息模型,。
以第二次無人機(jī)飛行數(shù)據(jù)為例,利用機(jī)載高光譜影像反演海水的總磷濃度,、總氮和高錳酸鹽濃度的分布圖,,如圖5所示。
4 結(jié)論與討論
本文以中國某段海面作為研究對象,,利用無人機(jī)搭載高光譜成像儀獲取的海面光譜圖像信息,,采用拼接軟件對獲取的影像進(jìn)行拼接以得到一段完整的海面及海灘的高光譜影像數(shù)據(jù);基于海水的固有特性,,提取了兩次無人機(jī)高光譜數(shù)據(jù)中的海水信息,;進(jìn)而根據(jù)現(xiàn)有報道的地面尺度研究海洋、湖泊富營養(yǎng)以及水污染的高光譜數(shù)據(jù)模型,,選擇了穩(wěn)定性較好的經(jīng)典模型,,對兩段海面進(jìn)行富營養(yǎng)(總氮、總磷和高錳酸鹽)的反演研究,。結(jié)合現(xiàn)場調(diào)研以及高光譜影像反演效果來看,,本實驗可以很好地反映出海面的富營養(yǎng)和受污染程度。該研究為水利,、水電部門和環(huán)保部門提供了一種監(jiān)測海水富營養(yǎng)及受污染的分布情況的有效方法,,為相關(guān)技術(shù)人員判斷污染源以及尋找水體富營養(yǎng)的原因提供了有效的技術(shù)手段。
(空格分隔,最多3個,單個標(biāo)簽最多10個字符)

 8
8
立即詢價
您提交后,專屬客服將第一時間為您服務(wù)