
| 型號(GaiaField-mini) | |||
| 譜儀特性 | |||
| 光譜范圍 | 400-1000(nm) | ||
| 光譜分辨率(30um) | 4nm+-0.5nm | ||
| 數(shù)值孔徑 | F/2.8 | ||
| 有效狹縫長度 | 8.9(mm) | ||
| 總效率 | >50% | ||
| 相機(jī)特性 | |||
| 傳感器 | CCD Sony ICX285,,逐行掃描 | ||
| 全幅像素 | 1392 (空間維)x 1040(光譜維) | ||
| 像素間距 | 6.45(um) | ||
| 相機(jī)輸出 | 16(bit) | ||
| 連接方式 | USB 2.0 | ||
| 耗電量 | 約2.5w | ||
| 工作電壓 | 5V | ||
| 系統(tǒng)特性 | |||
| 拍攝方式 | 懸停(內(nèi)置掃描) | ||
| 搭載平臺 | 旋翼無人機(jī),、無人飛艇,、 無人直升機(jī)等可懸停飛行器 推薦:大疆S1000 | ||
| 飛行高度 | <1000米 (決定于無人機(jī)安全飛行高度) | ||
| 鏡頭 | 18.5,23mm(可選) | ||
| 橫向視角 (FOVac,°) | 21@23mm | ||
| 橫向視場 | 234米@18.5mm, 186米@23mm (飛行高度500米) | ||
| 掃描視場(°) | 26@23mm | ||
| Bin方式 | 1X | 2X (推薦) | 4X |
| 空間分辨率 (@23mm,高度500米) | 0.17m @18.5,; 0.14m @23mm | 0.34m @18.5,; 0.27m @23mm | 0.67m @18.5; 0.53m @23mm |
| 掃描速度 (line images/s) | 30 | 60 | 84 |
| 單幅拍攝速度(秒) | 60 | 15 | 7 |
| 重量 | 相機(jī)(含內(nèi)置掃描)1.3Kg 增穩(wěn)云臺:1.7kg 數(shù)采及控制器及電池:0.9kg 總重<4kg | ||
| 電池 | 容量40Wh(工作時間>2小時) | ||
產(chǎn)品詳細(xì)清單
| 名稱 | 型號 | 說明 |
| 高光譜成像儀 | GaiaSky-mini | 4nm光譜分辨率 400~1000nm,光譜范圍 |
| 成像鏡頭 | OL及OLE系列鏡頭,,標(biāo)配:Hsia-OL23
| 23mm,,C-mount,400~1000nm |
| 懸疑無人機(jī)(大疆) | S1000 | 含有:DJI S1000八軸航拍機(jī),DJI A2飛控,,DJI iosd視頻疊加,,DJI5.8G圖傳, 10寸標(biāo)清 顯示器+HDMI轉(zhuǎn)接線, pl8充電器, 充電保姆,F(xiàn)UTABA 8J遙控器,,F(xiàn)UTABA 14SG遙控器,,模擬器,2.4G地面站 |
| 高空下落緩速系統(tǒng) | DJI DROPSAFE | 含降落傘一套,,及備用CO2氣瓶一組 |
| 采集控制系統(tǒng) | GaiaSky-mini-CP | 250G SSD,,4G內(nèi)存 |
| 電池 | 6S | 16000mAh, 22.2V,355.2Wh |
| 增穩(wěn)云臺 | GaiaSky- gimbal | 無刷云臺重量, BGM5208電機(jī) |
| 數(shù)據(jù)采集軟件 | specview | 光譜相機(jī)控制,數(shù)據(jù)采集,,自動曝光,,自動掃描速度,輔助攝像頭功能,,支持遠(yuǎn)程遙控,,支持巡航+慣導(dǎo)(BGC IG-500N)采集模式,數(shù)據(jù)支持ENVI等第三方分析軟件,。數(shù)據(jù)預(yù)處理功能:反射率校正,、區(qū)域校正、輻射度校正,、光譜及圖像數(shù)據(jù)預(yù)覽功能等(兩年內(nèi)免費(fèi)更新) |
| 選配模塊 | ||
| 高精度組合航姿系統(tǒng) | Ellipse-N INS/Gps | 功能:通過記錄姿態(tài)及位置信息,,實(shí)現(xiàn)巡航拍攝模式, 參數(shù)詳見:http://www.sbg-systems.com |
| 無線數(shù)據(jù)鏈路 | GaiaSky-datalink | 功能:遠(yuǎn)程控制相機(jī)采集與停止 900MHz,,功率1W(最大),,傳輸距離最大達(dá)可22kg(戶外/無線可視距離) |

 (1)
(1)
1) 當(dāng)區(qū)域內(nèi)可以近似取VFCmax=100%,,VFCmin=0%,。
公式(1)可變?yōu)椋?/span>
VFC = (NDVI - NDVImin)/ ( NDVImax - NDVImin) (5)
NDVImax 和NDVImin分別為區(qū)域內(nèi)最大和最小的NDVI值。由于不可避免存在噪聲,,NDVImax 和NDVImin一般取一定置信度范圍內(nèi)的最大值與最小值,,置信度的取值主要根據(jù)圖像實(shí)際情況來定。
2) 當(dāng)區(qū)域內(nèi)不能近似取VFCmax=100%,,VFCmin=0%
當(dāng)有實(shí)測數(shù)據(jù)的情況下,,取實(shí)測數(shù)據(jù)中的植被覆蓋度的最大值和最小值作為VFCmax和 VFCmin,這兩個實(shí)測數(shù)據(jù)對應(yīng)圖像的NDVI作為NDVImax和NDVImin,。
當(dāng)沒有實(shí)測數(shù)據(jù)的情況下,,取一定置信度范圍內(nèi)的NDVImax和NDVImin。VFCmax和VFCmin根據(jù)經(jīng)驗估算。
我們下面我們以“當(dāng)區(qū)域內(nèi)可以近似取VFCmax=100%,,VFCmin=0%”情況下
整個影像中NDVIsoil 和NDVIveg 取固定值,介紹在ENVI中實(shí)現(xiàn)植被覆蓋度的計算方法,。
使用的數(shù)據(jù)是經(jīng)過輻射校準(zhǔn),、噪聲去除的高光譜影像。
(1) 選擇Basic Tools-> Band Math,,利用高光譜影像計算NDVI,,輸入的公式為(float(b1)-float(b2)/ float(b1)-float(b2)),圖8為NDVI的密度分割圖,。
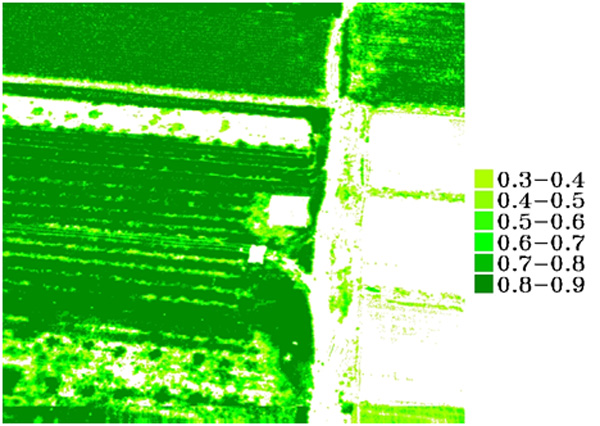
圖8 無人機(jī)高光譜影像的NDVI密度分割圖
(2) 選擇Basic Tools->Statistics ->Compute Statistics,,在文件選擇對話框中,選擇統(tǒng)計文件并計算統(tǒng)計參數(shù),,如圖9所示,。
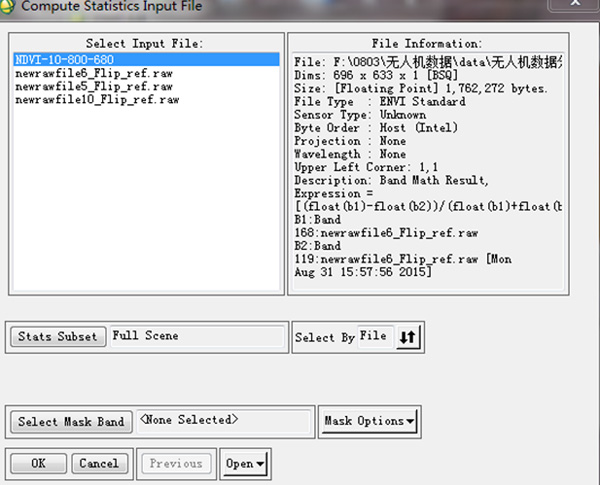
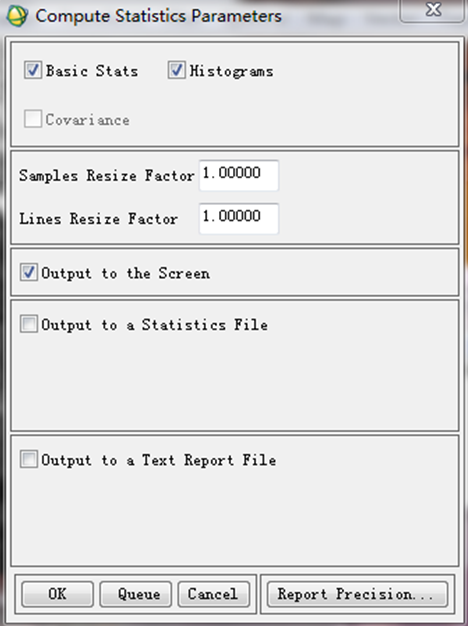
圖9選擇統(tǒng)計文件及統(tǒng)計參數(shù)
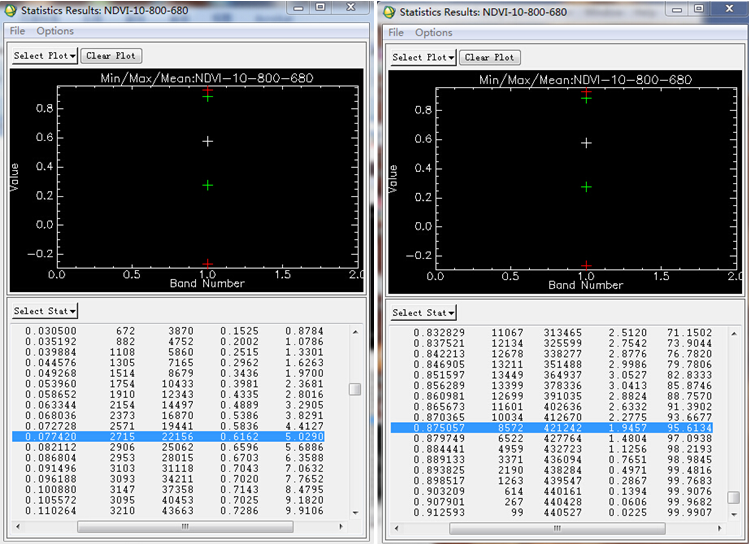
(b1 lt 0.077420)*0+(b1 gt 0.875057)*1+(b1 ge 0.077420 and b1 le 0.875057)* ((b1-0.077420)/ (0.875057-0.077420))
b1:選擇NDVI圖像
(5) 得到一個單波段的植被覆蓋度圖像文件,,像元值表示這個像元內(nèi)的平均植被覆蓋度,在Display顯示,。
(6) 選擇Tools->Color Mapping->Density Slice,,單擊Clear Range按鈕清除默認(rèn)區(qū)間。
(7) 選擇Options->Add New Ranges,,根據(jù)上面的對照表依次添加8個區(qū)間,,分別為每個區(qū)間設(shè)置一定的顏色,單擊Apply得到如下的植被覆蓋圖(圖11),。
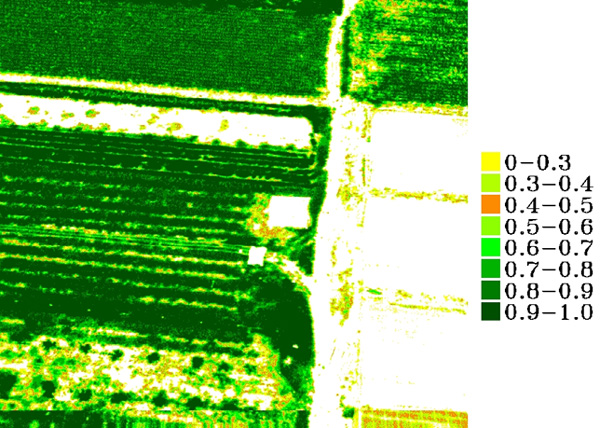
圖11植被覆蓋度遙感估算結(jié)果
(空格分隔,最多3個,單個標(biāo)簽最多10個字符)

 8
8 0.5nm
0.5nm
立即詢價
您提交后,,專屬客服將第一時間為您服務(wù)