遙感*的優(yōu)勢,,給高空目標(biāo)識別,、地物分類等研究提供了新的平臺。為了研究不同高度下地物的光譜特征變化以及不同時期,、不同高度下地物的有效快速識別方法,,本研究以2015年8月7日200 m高空高光譜影像和2015年9月25日100 m、200 m,、300 m高空高光譜影像共4景影像為研究對象,,研究不同高度下,地物的高光譜特征變化以及不同時期,、不同高度下地物的分類精度,。結(jié)果表明不同高度下,植被的光譜反射率差異顯著,,隨著高度的升高,,植被*的特征如“綠峰”降低、“紅谷”升高,、“紅邊位置”出現(xiàn)“紅移”,,在近紅外范圍內(nèi),光譜反射率降低,;在綜合考慮人工參與程度,、處理時間和分類精度等方面進(jìn)行比較可知,基于ISODATA法可實(shí)現(xiàn)不同時期,、不同高度下地物的快速識別研究,。研究結(jié)果為利用無人機(jī)高光譜遙感在其他領(lǐng)域的應(yīng)用奠定了基礎(chǔ)。
關(guān)鍵詞:無人機(jī)遙感,;高光譜,;不同高度;地物識別,;ISODATA
無人機(jī)(unmanned aerial vehicle,,UAV),是一種通過無線遙控或規(guī)劃航線飛行的無人駕駛飛機(jī),,它一般有動力系統(tǒng),、飛控系統(tǒng)、無線通訊遙控系統(tǒng),、有效載荷(武器,、偵查設(shè)備)等部分組成[1],。無人機(jī)與遙感技術(shù)的結(jié)合,即無人機(jī)遙感,,克服了近地面小范圍的作物遙感監(jiān)測的極限,,同時也克服了衛(wèi)星影像受時間分辨率、空間分辨率的影響,。無人機(jī)遙感以其全天時,、實(shí)時化、高分辨率,、靈活機(jī)動,、高性價比等優(yōu)勢,在農(nóng)業(yè),、生態(tài)環(huán)境,、新農(nóng)村建設(shè)規(guī)劃、自然災(zāi)害監(jiān)測,、公共安全,、水利、礦產(chǎn)資源勘探,、測繪等國民經(jīng)濟(jì)及社會發(fā)展各個領(lǐng)域發(fā)揮著越來越重要的作用,,成為繼衛(wèi)星遙感和有人通用航空遙感技術(shù)之后的新興發(fā)展方向[2]。
目前,,國內(nèi)外學(xué)者通過無人機(jī)遙感平臺搭載各種傳感器獲取地面圖像光譜信息,,取得了較大的研究進(jìn)展。如Sugiura 等[3]將成像傳感器搭載在無人機(jī)上,,獲取小面積農(nóng)田信息,,劃分出研究區(qū)域內(nèi)的作物葉面積指數(shù)分布情況。李冰等[4] 利用低空無人機(jī)遙感監(jiān)測冬小麥不同生長時期覆蓋度的變化,。Mitch Bryson 等[5]使用可見光低空拍攝無人機(jī)影像基于植被顏色及紋理對不同植被類型進(jìn)行分類,。Francisco 等[6]使用無人機(jī)影像對植被黃龍病進(jìn)行監(jiān)測。Córcoles 等[7]利用旋翼無人機(jī)實(shí)現(xiàn)了洋蔥郁閉度的無損測量,,并建模分析了郁閉度與葉面積指數(shù)之間的關(guān)系,。劉峰等[8]設(shè)計構(gòu)建基于無人直升機(jī)平臺的低空遙感系統(tǒng),對板栗生育期內(nèi)植被覆蓋度變化情況實(shí)施了監(jiān)測,。高林等[9] 以多旋翼無人機(jī)為平臺同步搭載高清數(shù)碼相機(jī)和多光譜傳感器組成的無人機(jī)農(nóng)情監(jiān)測系統(tǒng)對研究大豆葉面積指數(shù)反演,,取得了較高的精度。
然而,,國內(nèi)外大部分學(xué)者利用無人機(jī)遙感平臺運(yùn)用于作物的農(nóng)情監(jiān)測,、礦產(chǎn)資源探測等領(lǐng)域較多[10-12],然而很少有人利用無人機(jī)平臺搭載成像高光譜傳感器研究不同高度下同一地物光譜反射率的變化以及不同高度下不同時期地物的快速識別研究,。因此本研究利用無人機(jī)搭載成像高光譜儀,,以期分析不同高度下地物的光譜反射率差異和不同高度不同時期地物的快速精準(zhǔn)識別,,為利用無人機(jī)高光譜遙感在其他領(lǐng)域的應(yīng)用奠定基礎(chǔ)。
2.1 研究區(qū)域
野外實(shí)驗(yàn)分別于2015年8月7日和9月25日在北京市通州區(qū)馬駒橋鎮(zhèn)某農(nóng)田開展,。
2.2 數(shù)據(jù)采集設(shè)備
本次試驗(yàn)采用大疆八旋翼無人機(jī)S1000 (無人機(jī)凈重約4 kg,,zui大載重約 6 kg),在無人機(jī)遙感平臺上搭載四川雙利合譜科技有限公司自主研發(fā)的成像光譜儀GaiaSky-mini,,該無人機(jī)遙感平臺采用的是無人機(jī)懸置空中,,成像光譜儀內(nèi)置推掃獲取地面圖像(其主要參數(shù)見表1)。8月7日僅飛行了200 m高度,,地面范圍約80 m×80 m,;9月25日飛行了100 m,、200 m,、300 m三個不同高度,地面范圍分別約為40 m×40 m,、80 m×80 m,、120 m×120 m,無人機(jī)遙感平臺的實(shí)景圖,,如圖1,。
表1 GaiaSky-mini 機(jī)載成像高光譜儀系統(tǒng)參數(shù)
Table 1 GaiaSky-mini high airborne imaging spectrometer system parameters
| 序號 | 項(xiàng)目 | 參數(shù) |
| 1 | 光譜掃描范圍/nm | 400~1000 |
| 2 | 光譜分辨率/nm | 4±0.5 |
| 3 | 成像鏡頭/mm | 23 |
| 4 | 光譜通道數(shù) | 520 |
| 5 | 全幅像素 | 1392×1040 |
| 6 | 傳感器 | CCD Sony ICX285 |
| 7 | 重量 | 約1.0kg |

圖1 無人機(jī)遙感平臺實(shí)景圖
Fig. 1 UAV remote sensing platform picture
2.3 數(shù)據(jù)的預(yù)處理與分析
無人機(jī)高光譜圖像的預(yù)處理在四川雙利合譜科技有限公司自主研發(fā)的SpecView軟件中進(jìn)行,包括鏡像變換[13],、黑白幀校準(zhǔn)[14-15](如公式1所示),。高光譜圖像噪聲去除采用zui小噪聲分離變換(Minimum Noise Fraction Rotation,MNF Rotation)[16-18],,圖像的感興趣區(qū)域提取,、圖像分類方法均在ENVI/IDL 5.3上完成。
 (1)
(1)
式中,,Rref 是校正過的圖像,,DNraw 是原始圖像,DNwhite為白板校正圖像,,DNdark 是黑板校正圖像,。
高光譜遙感圖像分類是高光譜遙感圖像分析和應(yīng)用的重要內(nèi)容,根據(jù)是否使用類別的先驗(yàn)知識,,可分為監(jiān)督分類和非監(jiān)督分類,,常用的監(jiān)督分類方法有zui小距離分類法、馬氏距離分類法,、zui大似然分類法,、光譜匹配法和神經(jīng)網(wǎng)絡(luò)法等,非監(jiān)督分類常用的方法有K-Means和ISODATA法[19],。本研究運(yùn)用監(jiān)督分類方法中的馬氏距離分類法,、zui大似然分類法,、神經(jīng)網(wǎng)絡(luò)法以及非監(jiān)督分類的ISODATA法,比較這四種分類方法在不同高度下不同時期的無人機(jī)高光譜影像中地物的分類識別精度,,本研究利用總體分類精度和Kappa系數(shù)對分類精度進(jìn)行評價[20],。
3.1 同一研究區(qū)域不同高度下光譜曲線的差異分析
圖2為9月25日,天氣為晴,,基于無人機(jī)獲取的三個不同高度的高光譜圖像的(RGB真彩色合成圖),,光譜曲線分別為同一研究區(qū)域,100 m,、200 m,、300 m三個高度的光譜曲線差異。以植被為研究對象,,分析同一研究區(qū)域不同高度下光譜曲線的差異,。以一個具體的植被象元為例,從圖2中可知,,不同高度下植被光譜反射率差異顯著,,隨著高度的升高,植被*的特征“綠峰”降低,、“紅谷”升高,、“紅邊位置”出現(xiàn)“紅移”。且在400-510 nm范圍內(nèi)光譜反射率隨無人機(jī)飛行高度的升高而升高,;在近紅外范圍內(nèi),,光譜反射率隨無人機(jī)飛行高度的升高而降低,該這是因?yàn)殡S著高度升高,,空間分辨率降低,,圖像中一個像元代表地面的范圍加大,出現(xiàn)混合像元的概率增加,。從圖2中可知,,隨著無人機(jī)高度的升高,混合像元中土壤所占比例增加,,從而造成“綠峰”降低,、“紅谷”升高,紅邊位置發(fā)生了“紅移”等現(xiàn)象,。
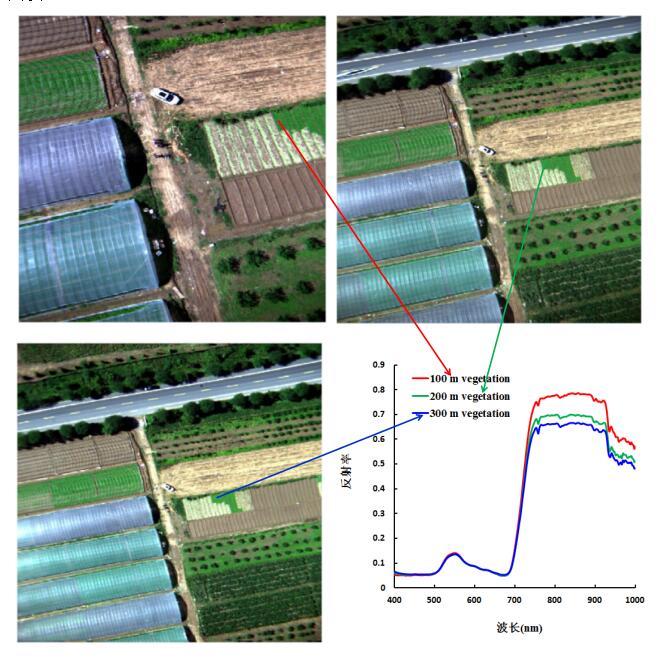
圖2 同一研究區(qū)域不同高度下光譜曲線
Fig. 2 The spectral curve at different heights in the same study area
3.2 機(jī)載影像中不同地物的光譜曲線差異分析
圖3為8月7日天氣為晴,,利用無人機(jī)獲取的近地面200 m高度的高光譜圖像及不同作物與土壤的光譜反射率曲線。從圖中可知,,土壤的光譜曲線與三種作物的光譜曲線差異顯著,,在400-515 nm和580 - 690 nm范圍內(nèi),土壤的光譜反射率高于三種作物的光譜反射率,。在可見光區(qū)域,,茄子苗,、西瓜苗、葡萄樹三種作物的光譜反射率差異也較為顯著,,其中西瓜苗的光譜反射率z高,,其次是茄子苗,然后是葡萄樹,;在近紅外區(qū)域,,西瓜苗和茄子苗的光譜反射率十分相近,總體而言,,茄子苗的光譜反射率zui高,,其次是西瓜苗,然后是葡萄樹,。
.jpg)
圖3 8月7日不同作物與土壤的光譜反射率曲線
Fig. 3 The spectral reflectance curves of different crops and soil on August 7
圖4為9月25日天氣為晴,,利用無人機(jī)獲取的近地面300 m高度的高光譜圖像及不同地物的光譜反射率曲線。從中可知,,植物,、土壤、公路,、大棚植物等地物光譜曲線差異顯著。在400-920 nm范圍內(nèi)公路的光譜反射率曲線保持較平穩(wěn)的趨勢,,土壤的光譜反射率在此范圍內(nèi)呈上升趨勢,;400-700 nm范圍內(nèi),大棚植物的光譜反射率高于裸露植物,,而在700-100 nm范圍內(nèi),,則是裸露植物的光譜反射率高于大棚植物。
.jpg)
圖4 9月25日不同地物的光譜反射率曲線
Fig. 4 The spectral reflectance curves of different ground objects on September 25
3.3 不同地物的快速識別分類研究
分別運(yùn)用馬氏距離法,、zui大似然法,、神經(jīng)網(wǎng)絡(luò)、ISODATA(K-Means分類效果不佳,,在此不列舉)四種分類方法對8月7日的200 m高光譜圖像和9月25日的300 m高光譜圖像進(jìn)行分類研究,。完成分類之后,使用目視判讀的方法從圖像上選取不同地物各1000像元計算混淆矩陣進(jìn)行驗(yàn)證,。結(jié)合驗(yàn)證數(shù)據(jù),,采用混淆矩陣的方法對 4 類方法進(jìn)行精度評價,結(jié)果如表 2和表3 所示,。從表2和表3可知,,神經(jīng)網(wǎng)絡(luò)法的分類精度z高,其次是馬氏距離分類法,,再次是ISODATA法,,zui低的zui大似然分類法,。但從處理時間來看,神經(jīng)網(wǎng)絡(luò)的處理時間較長,,分別為35.14 min和38.26 min,,其次是zui大似然分類法,分別為15.61 min和16.75min,,再次是馬氏距離法,,分別是12.54 min和14.55 min,處理時間z短的是ISODATA法,,處理時間分別為3.64 min和3.97 min,。
表2 8月7日的200 m高光譜圖像分類精度評價
Table 2 200 m hyperspectral image classification accuracy evaluation on August 7
| 分類方法 | 總體分類精度 | Kappa系數(shù) | 處理時間/min |
| 馬氏距離 | 92.67% | 0.915 | 12.54 |
| 大似然法 | 86.65% | 0.844 | 15.61 |
| 神經(jīng)網(wǎng)絡(luò)法 | 98.56% | 0.982 | 35.14 |
| ISODAIA | 89.41% | 0.887 | 3.64 |
表3 9月25日的300 m高光譜圖像分類精度評價
Table 3 300 m hyperspectral image classification accuracy evaluation on September 25
| 分類方法 | 總體分類精度 | Kappa系數(shù) | 處理時間/min |
| 馬氏距離 | 94.07% | 0.922 | 14.55 |
| zui大似然法 | 89.45% | 0.863 | 16.75 |
| 神經(jīng)網(wǎng)絡(luò)法 | 98.76% | 0.984 | 38.26 |
| ISODAIA | 90.53% | 0.891 | 3.97 |
4種分類方法的原理各不同,從人工參與程度,、處理效率和分類精度等方面進(jìn)行比較分析可知,,ISODATA法的分類精度雖然低于神經(jīng)網(wǎng)絡(luò)和馬氏距離法,但是不需要太多的人工參與,,處理卻大大提高,,且分類精度高于zui大似然分類法。因此,,它同時具備了監(jiān)督分類的高精度和非監(jiān)督分類的低時間的特點(diǎn),,在無人機(jī)低空遙感研究中,能夠以較低的工作成本快速獲取高精度的地物識別,。圖5和圖6分別為8月7日200 m和9月25日300 m高光譜圖像基于ISODATA法的分類效果圖,。從圖5可知,少量的雜草被錯分為葡萄樹,、西瓜苗,、茄子苗,但是從大的區(qū)域來看,,原味葡萄樹,、西瓜苗、茄子苗的像素并未存在錯分和漏分現(xiàn)象,。在圖6中,,少量的土壤,可能是沙土,,被錯分為大棚或公路斑馬線,,其他地物不存在錯分和漏分現(xiàn)象??傮w而言,,ISODATA法可實(shí)現(xiàn)無人機(jī)高光譜遙感對地面地物的快速有效的識別。
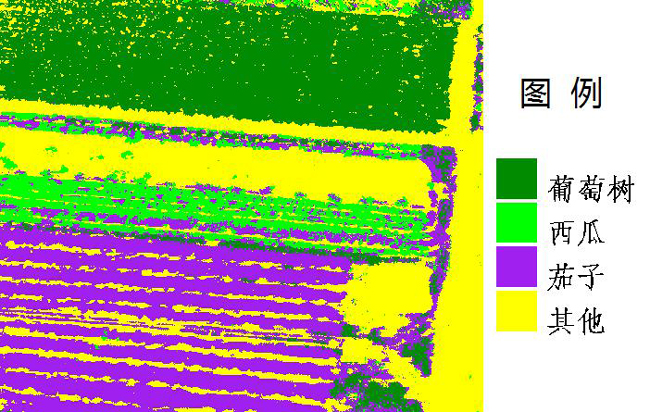
圖5 8月7日200 m高光譜圖像基于ISODATA法的分類效果圖
Fig. 5 The classification rendering of 200m hyperspectral image based on ISODATA method on August 7
.jpg)
圖6 9月25日300 m高光譜圖像基于ISODATA法的分類效果圖
Fig. 6 The classification rendering of 300m hyperspectral image based on ISODATA method on September 25
4. 結(jié)論
本研究基于無人機(jī)平臺搭載成像高光譜相機(jī),分別獲取了兩個時間段不同高度的高光譜圖像,,分析了不同高度同一地物光譜曲線的差異和基于不同高度下不同分類方法的分類精度評價,。研究表明隨著無人機(jī)高度的升高,混合像元中土壤所占比例增加,,從而造成“綠峰”降低,、“紅谷”升高,紅邊位置發(fā)生了“紅移”等現(xiàn)象,,研究結(jié)果與地面光譜儀ASD的研究結(jié)果一致[21-22],。ISODATA法的分類精度雖然不及神經(jīng)網(wǎng)絡(luò)和馬氏距離分類法,但是在綜合考慮人工參與程度,、處理效率和分類精度時可知,,ISODATA法對于快速實(shí)現(xiàn)地物的識別效果更好,研究結(jié)果為利用無人機(jī)高光譜遙感進(jìn)行軍事偽裝快速識別,、海洋油污面積估測,、災(zāi)害損失評估等領(lǐng)域具有重大意義。
(空格分隔,最多3個,單個標(biāo)簽最多10個字符)

 8
8
立即詢價
您提交后,,專屬客服將第一時間為您服務(wù)