 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)

1FL6024-2AF21-1MB1西門子V90伺服電機0.1KW
 | 1FL6024-2AF21-1MB1 SIMOTICS S-1FL6 電源 230 V 三相交流 PN=0.1 kW;NN=3000 U M0=0.32 Nm,;MN=0.32 Nm 軸 高度 20 mm 值編碼器 單匝 21 位帶滑鍵 公差 N,,帶駐車制動器 防護等級 IP65,帶 適合驅(qū)動的油密封件 V90 |
S7-1200運動控制指令
用戶組態(tài)軸的參數(shù),,通過控制面板調(diào)試成功后,,就可以開始根據(jù)工藝要求編寫控制程序了。
關于運動控制指令有幾點需要說明:
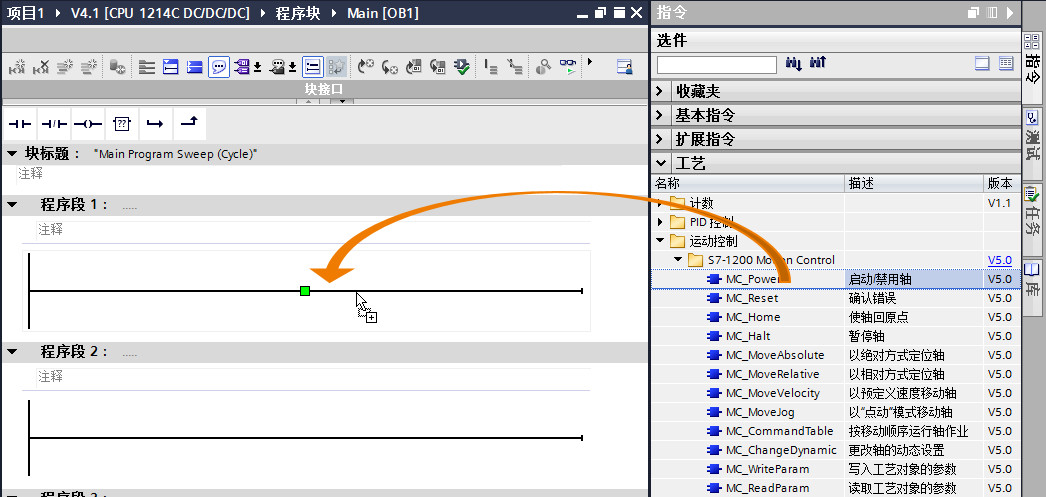
1. 打開OB1塊,,在Portal軟件右側(cè)“指令”中的“工藝”中找到“運動控制”指令文件夾,,展開“S7-1200 Motion Control”可以看到所有的S7-1200 運動控制指令??梢允褂猛献Щ蚴请p擊的方式在程序段中插入運動指令,,如下圖所示,以MC_Power指令為例,,用拖拽方式說明如何添加Motion Control指令,。
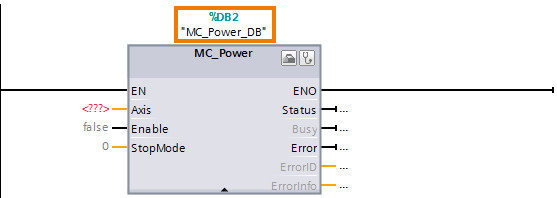
這些Motion Control指令插入到程序中時需要背景數(shù)據(jù)塊,如下圖所示,,可以選擇手動或是自動生成DB塊的編號,。

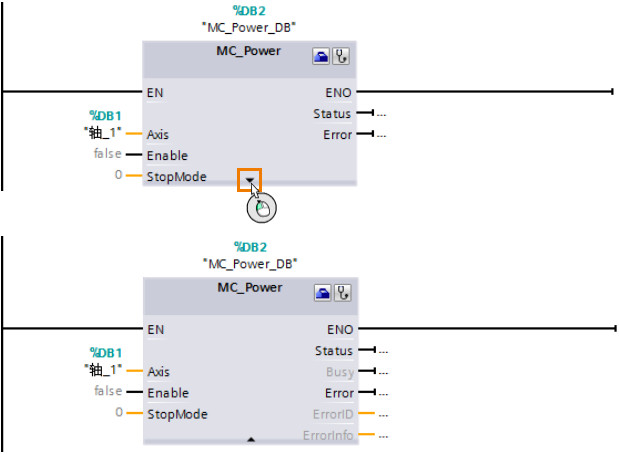
添加好背景DB后的MC_Power指令如下圖所示。
『注意』運動控制指令之間不能使用相同的背景DB,,方便的操作方式就是在插入指令時讓Portal軟件自動分配背景DB塊,。
2. 運動控制指令的背景DB塊在“項目樹”-->“程序塊” --> “系統(tǒng)塊”-->“程序資源”中找到。用戶在調(diào)試時可以直接監(jiān)控該DB塊中的數(shù)值,,如下圖所示,。

3. 每個軸的工藝對象都一個背景DB塊,用戶可以通過下面的方式打開這個背景DB塊:
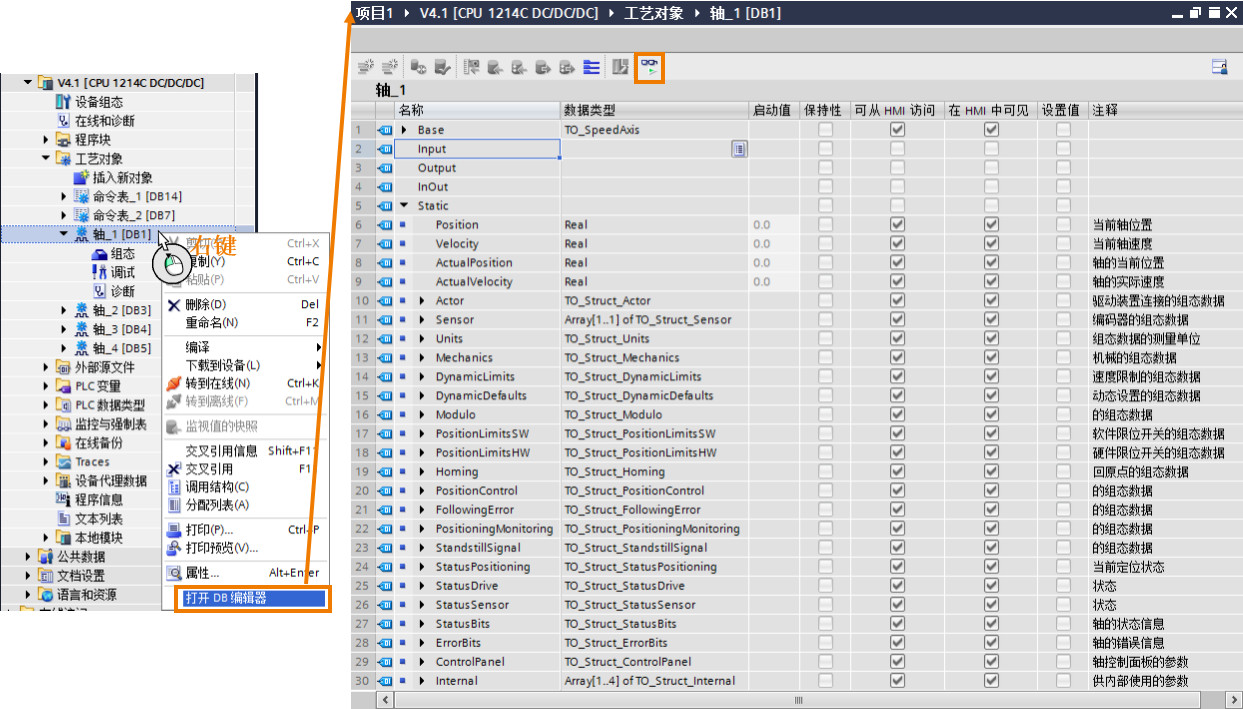
可以對DB塊中的數(shù)值進行監(jiān)控或是讀寫,。
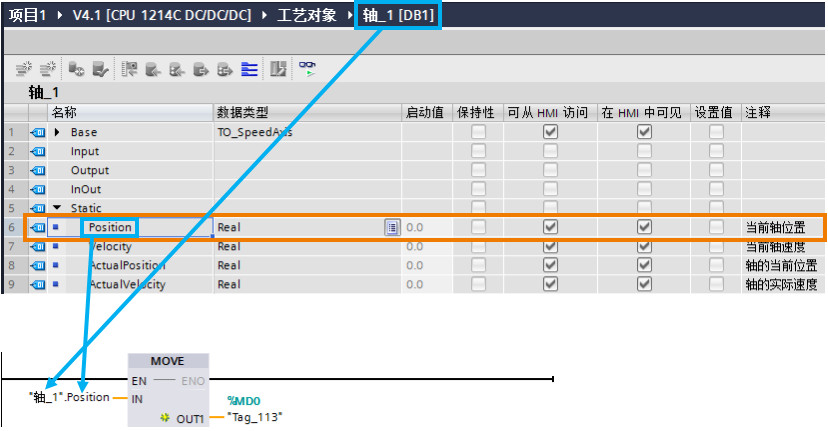
以實時讀取“軸_1”的當前位置為例,,如下圖所示,,軸_1 的DB塊號為DB1,用戶可以在OB1 調(diào)用MOVE指令,,在MOVE指令的IN端輸入:DB1.Position,,則Portal軟件會自動把DB1.Position更新成:“軸_1”.Position。用戶可以在人機界面上實時顯示該軸的實際位置,。
4. 每個Motion Control指令下方都有一個黑色三角,,展開后可以顯示該指令的所有輸入/輸出管腳。 展開后的指令管腳有灰色的,,表示該管腳是不經(jīng)常用到的指令管腳,。
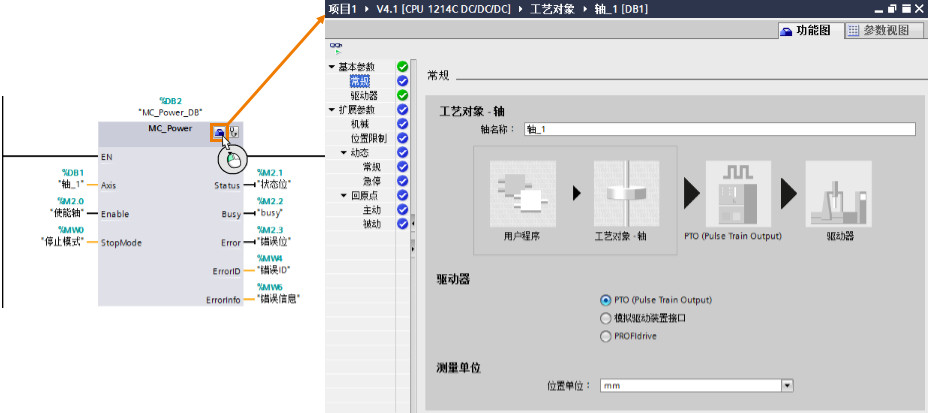
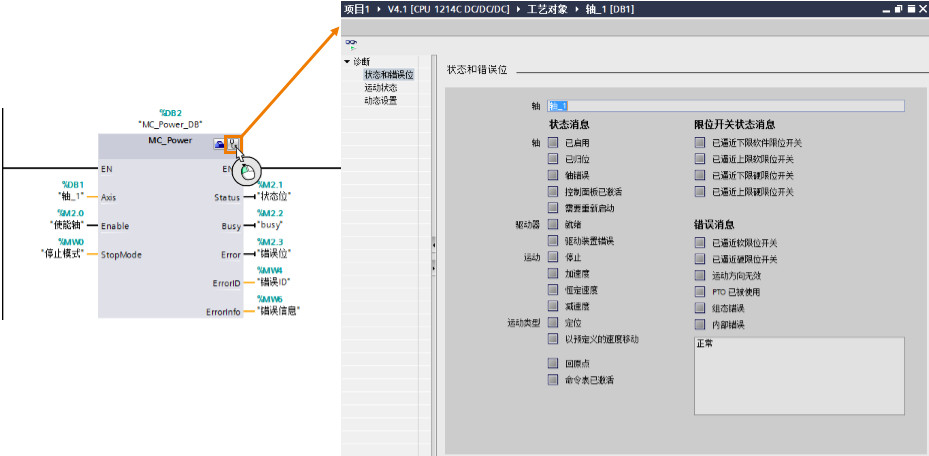
5. 指令右上角有兩個快捷按鈕,可以快速切換到軸的工藝對象參數(shù)配置界面和軸的診斷界面,。
下圖是快速切換到診斷界面,。
6. 有部分S7-1200 運動控制指令有一個Execute觸發(fā)管腳,該管腳需要用上升沿觸發(fā),。上升沿可以有兩種方式:
①用上升沿指令|P|,。
②使用常開點指令,但是該點的實際應用中使其成為一個上升沿信號,,例如用戶通過觸摸屏的按鈕來操作控制,,該按鈕的有效動作為上升沿觸發(fā)。
7. 運動控制指令輸入端“Execute”和輸出端“Done”和“Busy”之間的關系如下圖所示:
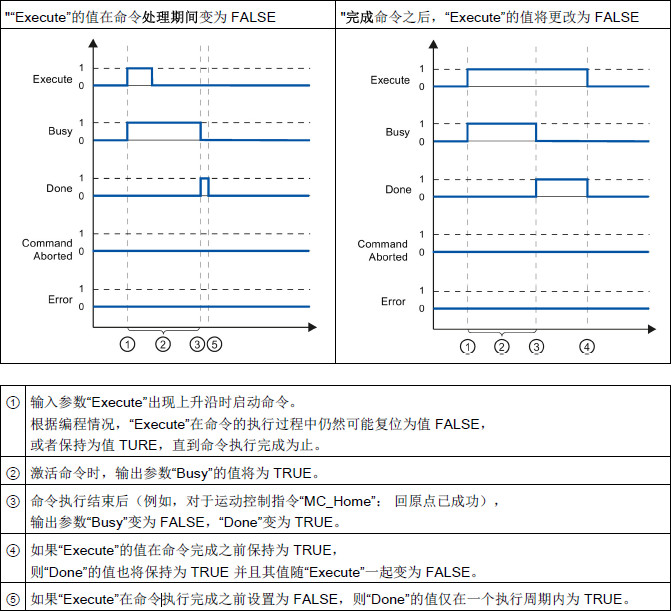
因此,,如果用戶用|P|指令觸發(fā)帶有“Execute”管腳的指令,,則該指令的“Done”只在一個掃描周期內(nèi)為1,因此在監(jiān)控程序時看不到Done位為1,。