


 9
9
當(dāng)前位置:上海育仰科教設(shè)備有限公司>>公司動態(tài)>>汽車電子巡航控制系統(tǒng)的原理及應(yīng)用

汽車電子巡航控制系統(tǒng)的原理及應(yīng)用
隨著汽車工業(yè)的迅速發(fā)展,,汽車的電子化程度越來越高,,性能不斷增強(qiáng)。巡航控制系統(tǒng)是一種使駕駛員腳離油門踏板就能保持預(yù)先設(shè)定車速行駛的系統(tǒng),,其主要目的是減少駕駛疲勞,。巡航控制系統(tǒng)在美國應(yīng)用以來,已經(jīng)比較普及,。在美國,大多數(shù)轎車上都裝用了巡航控制系統(tǒng),;隨著高速公路的發(fā)展,,巡航控制系統(tǒng)的裝車率不斷提高。在我國,,今后也會
有更多的車輛應(yīng)用巡航控制系統(tǒng),,系統(tǒng)的性能也會不斷地提高。
1,、巡航控制系統(tǒng)的功能及優(yōu)點(diǎn)
汽車巡航控制系統(tǒng)(crusie control system)亦稱為恒速行駛系統(tǒng),。它是利用先進(jìn)的電子技術(shù)對汽車的行駛速度進(jìn)行自動調(diào)節(jié),從而實(shí)現(xiàn)以事先預(yù)定的速度行駛的一種電子控制裝置,。
汽車巡航控制系統(tǒng)的作用是:可以按照駕駛員所設(shè)定的速度,,不用踩油門就可以自動地保持車速,使車輛以設(shè)定的速度行駛,。采用這種裝置后,,當(dāng)在高速公路上長時(shí)間行車時(shí),駕駛員只要把住方向盤就可以了,,不用頻繁地踩油門踏板,,減輕了疲勞,提高了汽車行駛時(shí)的舒適性,,同時(shí)減少了不必要的車速變化,,改善了汽車的燃油經(jīng)濟(jì)性和發(fā)動機(jī)的排放。
2,、巡航控制系統(tǒng)的基本工作原理
巡航控制系統(tǒng)通過車速傳感器將車速信號輸入發(fā)動機(jī),,對微機(jī)進(jìn)行控制,由微機(jī)控制真空系統(tǒng)工作,。該系統(tǒng)需要使用伺服器,、車速控制開關(guān)和制動踏板上的真空解除開關(guān)等。
系統(tǒng)中的電子控制裝置可根據(jù)行駛阻力的變化,,自動調(diào)節(jié)發(fā)動機(jī)油門開度,,使車速保持恒定。這樣既減少了不必要的車速變化,、節(jié)省了燃料,,也減輕了駕駛員的負(fù)擔(dān),。
電子巡航控制系統(tǒng)的方框圖如圖1所示。 .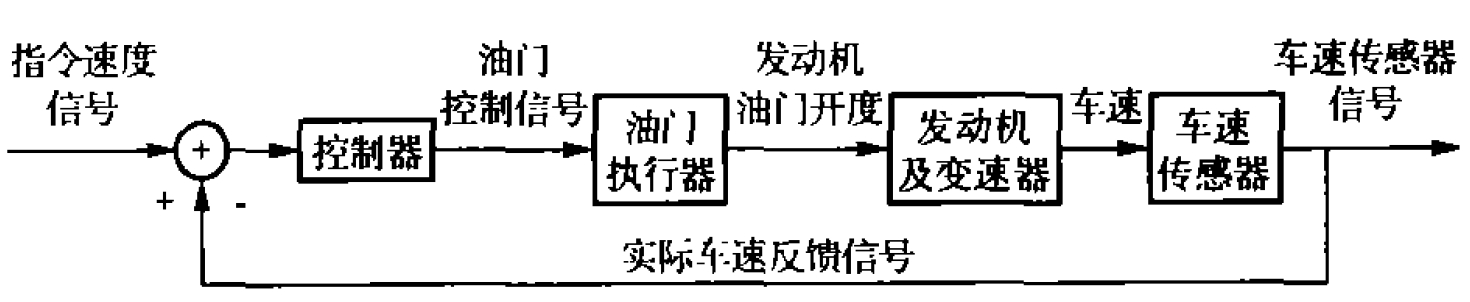
圖1 電子巡航控制系統(tǒng)框圖
控制器有兩個(gè)輸人信號,,一個(gè)是駕駛員按要求設(shè)定的指令速度信號,,另一個(gè)是實(shí)際車速的反饋信號。
電子控制器檢測這兩個(gè)輸入信號之間的誤差后,,產(chǎn)生一個(gè)送至油門執(zhí)行器的油門控制信號,。油門執(zhí)行器根據(jù)所接收的控制信號調(diào)節(jié)發(fā)動機(jī)油門開度,以修正電子控制器所檢測到的誤差,,從而使車速保持恒定,。實(shí)際車速由車速傳感器測得并轉(zhuǎn)換成與車速成正比的電信號,反饋至電子控制器,。作為巡航控制系統(tǒng)核心部件的控制器,,采用比例積分(PI)控制的電子控制裝置。油門控制信號實(shí)際上由兩部分疊加而成,。線性放大部件提供一個(gè)與誤差信號e成正比的控制信號,,積分放大器則設(shè)置一條斜率可調(diào)整的輸出控制線,用來將這一段時(shí)間的車速誤差降為0,。實(shí)際上并不能真正降低到0,,而是保持在一定的誤差范圍內(nèi),因?yàn)楫?dāng)車速誤差為0時(shí),,行駛阻力的微小變化都將引起油門開度的變化,,容易產(chǎn)生游車。
如圖2所示,,曲線A為汽車在平坦路面上行駛時(shí)的車速V與節(jié)氣門開度θ的關(guān)系曲線,,該曲線存儲在計(jì)算機(jī)中。因此,,當(dāng)車速達(dá)到V0時(shí),,按下擬定開關(guān),節(jié)氣門開度θ先被定為θ0,。同時(shí),,計(jì)算機(jī)還擬定了控制線。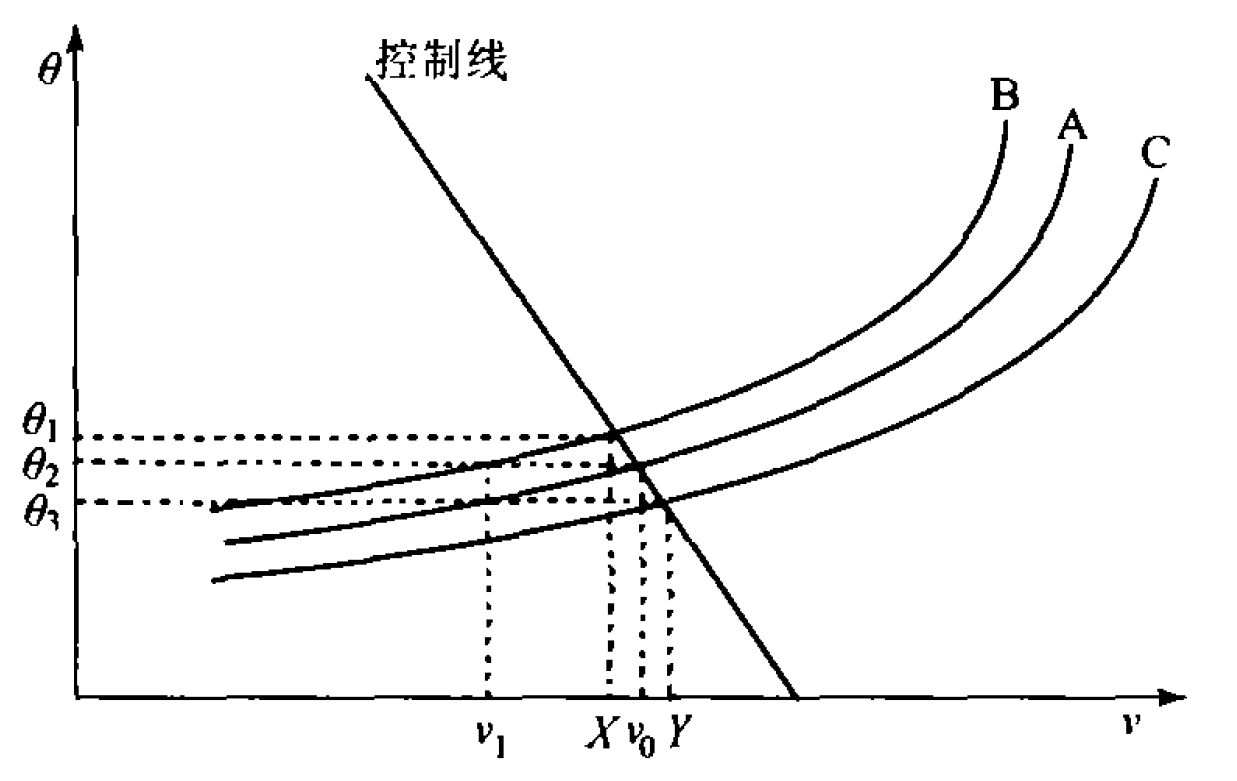
圖2 車速自動控制線圖
當(dāng)汽車在平坦路面上以速度V0行駛時(shí),,按下擬定開關(guān),,便進(jìn)入自動行駛狀態(tài)。當(dāng)遇到爬坡時(shí),,行車阻力增加,,因此,車速與節(jié)氣門開度的關(guān)系就變成曲線B,。
此時(shí),,若沒有車速自動控制裝置進(jìn)行節(jié)氣門開度調(diào)節(jié),,車速會降到V1。但由于裝有速度自動控制裝置,,當(dāng)汽車阻力增加,、車速下降時(shí),傳感器就把該信號反饋給計(jì)算機(jī),,經(jīng)過處理后發(fā)出指令,,沿著控制線調(diào)節(jié)節(jié)氣門,節(jié)氣門開度便從θ0變?yōu)?theta;1,,使車速穩(wěn)定在X點(diǎn),,重新取得平衡,汽車便以這一速度行駛,。若汽車遇到下坡時(shí),行駛阻力減小,,車速與節(jié)氣門開度的關(guān)系就變成曲線C,。此時(shí),車速自動控制裝置也沿著控制線調(diào)節(jié)節(jié)氣門開度,,使節(jié)氣門開度從θ1變?yōu)?theta;2,,車速在Y點(diǎn)取得平衡。由此可見,,即使行駛阻力發(fā)生變化,,車速也只能在X-Y,范圍內(nèi)變化,,使車速基本保持穩(wěn)定,。
從圖2可以看出,計(jì)算機(jī)中擬定的控制線的斜率越小,,車速的波動量(控制誤差)也就越小,,若控制線呈垂直狀態(tài)時(shí),車速的波動減小到0,。這樣,,行駛阻力有微小的變化都會引起節(jié)氣門開度的變化,因此由于反應(yīng)過度靈敏,,造成游車現(xiàn)象,,這是我們不希望的。所以應(yīng)綜合考慮控制誤差和游車問題,,選擇一個(gè)合適的控制線斜率,。
3、電子巡航控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
3.1 系統(tǒng)結(jié)構(gòu)
設(shè)計(jì)的電子巡航控制系統(tǒng)的電路方框圖如圖3所示,。巡航控制系統(tǒng)由指令開關(guān),、車速傳感器,、電子控制器和執(zhí)行裝置4部分組成。在汽車行駛時(shí),,車速傳感器把車速轉(zhuǎn)換成脈沖信號,,再通過D/A轉(zhuǎn)換電路轉(zhuǎn)換成與車速成正比的直流電壓。駕駛員按下擬定開關(guān),,自我維持電路便進(jìn)入工作狀態(tài),,采樣及保持電路便擬定了與該瞬間的車速相對應(yīng)的節(jié)氣門開度的基準(zhǔn)電壓,確定節(jié)氣門的*開度值,。然后,,比較放大電路將基準(zhǔn)電壓與由車速脈沖信號轉(zhuǎn)換的電壓進(jìn)行比較,使增速控制電路或減速控制電路進(jìn)入工作,。接著,,通過控制中繼器帶動執(zhí)行裝置,調(diào)節(jié)節(jié)氣門開度,,使其達(dá)到*值,。執(zhí)行機(jī)構(gòu)為電動馬達(dá)式,根據(jù)電子控制器的指令調(diào)節(jié)節(jié)氣門開度,。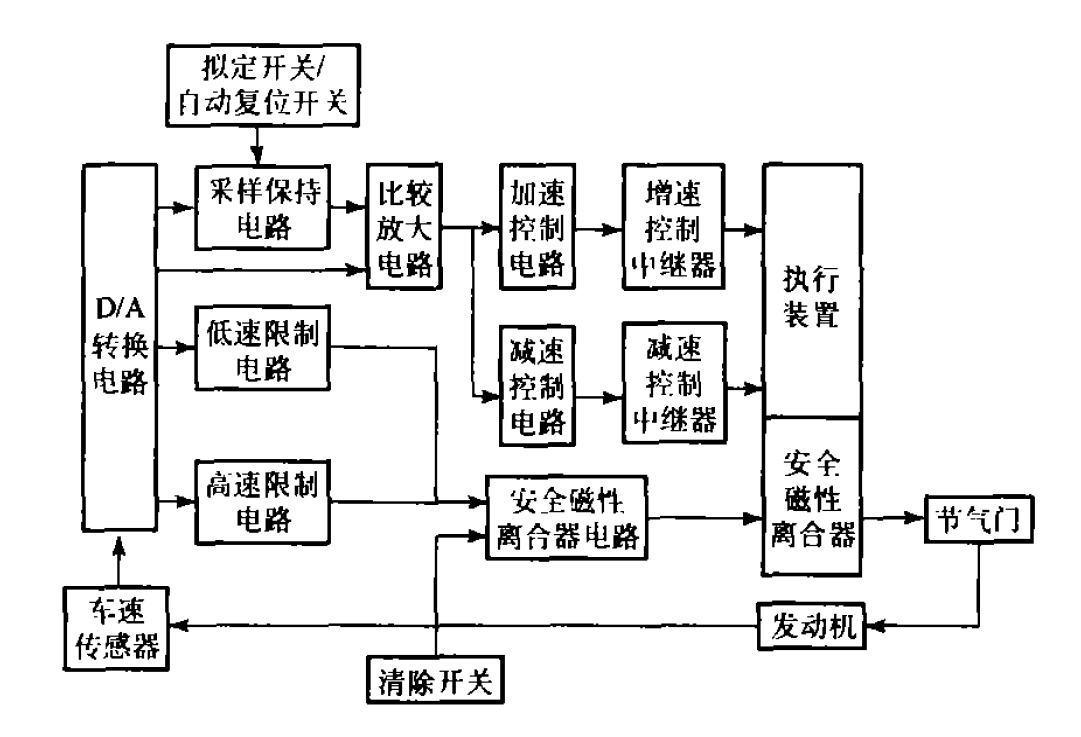
圖3 汽車巡航控制系統(tǒng)方框圖
3.2 安全裝置
當(dāng)汽車制動或變速器處于空當(dāng)位置時(shí),,節(jié)氣門必須回到全閉狀態(tài)。當(dāng)車速自動控制裝置出現(xiàn)故障,、而節(jié)氣門卻處于全開狀態(tài)時(shí),,汽車將失去控制而造成高速奔馳,這是非常危險(xiǎn)的,。為此,,該系統(tǒng)設(shè)有安全裝置和速度限制電路。
安全裝置是一個(gè)磁性離合器,,裝在執(zhí)行裝置的zui后部分,,同時(shí),在操作部分裝有離合器開關(guān),、制動開關(guān),、空擋開關(guān)和手剎車開關(guān)。當(dāng)踩下離合器或制動器踏板或變速桿處于空擋,,或手剎車起作用時(shí),,它們的開關(guān)就會發(fā)出信號給執(zhí)行裝置,執(zhí)行裝置接到信號后便啟動安全磁性離合器電路,,使安全磁性離合器分離,,把車速自動控制裝置與節(jié)氣門分隔開來,起到安全保護(hù)的作用,此時(shí)節(jié)氣門開度由駕駛員控制,。
限速電路由高速限制電路和低速限制電路組成,。高速限制電路的作用是在由于某些故障使車速超過100 km/h時(shí)起作用,以防止車速失控飛馳,。低速限制電路是在車速低于49 km/h時(shí)起作用,,防止車速過低。車速在40 km/h以下時(shí),,車速自動控制裝置不起作用,,車速由駕駛員控制。如果沒有低速控制電路,,在道路付款處臨時(shí)停車時(shí),,當(dāng)按下自動復(fù)位開關(guān)、駕駛員專心付款時(shí)如無意松開制動踏板,,會引起汽車自動行駛的情況,。
一旦傳感器產(chǎn)生故障或其線路發(fā)生斷路,由于沒有車速信號,,低速限制電路視車速為0,,使車速自動控制裝置停止工作。此外,,若執(zhí)行裝置的電位計(jì)產(chǎn)生故障或反饋電路短路,由于沒有反饋節(jié)氣門開度電壓,,不能再沿著控制線調(diào)節(jié)節(jié)氣門的開度,,車速就會急速降低。為了防止這種現(xiàn)象的產(chǎn)生,,還設(shè)有車速幅度的限制電路,,即使在zui壞的情況下,可以把車速的控制誤差限制在±15 km/h以內(nèi),。