


 9
9
當前位置:上海育仰科教設(shè)備有限公司>>公司動態(tài)>>電梯模型在PLC可編程控制器實踐教學中的應(yīng)用

電梯模型在PLC可編程控制器實踐教學中的應(yīng)用
隨著現(xiàn)代自動化技術(shù)水平的不斷進步,,PLC 在實際的工業(yè)控制中起到了十分關(guān)鍵的作用,而且在現(xiàn)代高校的自動化教學中,,PLC 也成為一門*的課程,。但如何將學生所學的知識與實踐結(jié)合起來卻是一個很大的問題。在以往的課程教學中,,通常只是通過仿真軟件或一些簡單的PLC 控制實驗,,讓學生簡單體驗硬件的接線、編程軟件的使用以及一些指令的用法,,學生很難建立一個系統(tǒng)的概念,。
本文以YUY-DT11六層電梯教學實訓模型為對象,結(jié)合三菱FR-D700 變頻器,,介紹了如何利用可編程控制器設(shè)計電梯模型的自動控制系統(tǒng),,主要包括該系統(tǒng)的硬件組成、主控程序的控制流程圖,、主要控制模塊的梯形圖程序以及上位機監(jiān)控界面的設(shè)計等,。同時,該課題結(jié)合模塊化設(shè)計的思想,,簡化了電梯控制中復雜的邏輯設(shè)計,,使得該實例可以很好地將課程中的許多知識點貫穿到實際應(yīng)用中。
1,、電梯模型簡介
1.1電梯模型組成
該款用于教學實踐的仿真電梯模型一共設(shè)有7層,,其中底層為檢修層,第二層開始為正常使用層,,如圖1 所示,。電梯結(jié)構(gòu)分為實驗機架、拽引機,、轎廂,、對重鐵、轎廂軌道、對重鐵軌道,、變頻器,、語音到站鐘、33點輸出端口以及31 點輸入端口等,。
圖1 電梯實訓模型
1.2電梯模型功能
該電梯模型主要有正常運行模式和檢修模式,,且檢修模式的權(quán)限高于正常運行模式。檢修模式下主要檢查電梯的上下行功能,,轎廂門開關(guān)功能,,急停功能,火警功能等是否正常,。正常模式下,,電梯響應(yīng)轎廂內(nèi)外各個層的呼叫信號,并準確做出應(yīng)答——包括電梯運行方向,、自動平層、開關(guān)門等操作,。其主要控制要求為: ① 電梯下行; ② 電梯上行; ③ 電梯隨時對轎廂內(nèi)外召喚信號進行登記; ④ 電梯運行到某一層后,,對該層轎箱內(nèi)外登記信號進行消除; ⑤ 轎廂上下行時,,只響應(yīng)順向截梯信號,保留反向呼梯信號,。
2,、控制系統(tǒng)的硬件設(shè)計
本項目的系統(tǒng)框圖如圖2 所示。
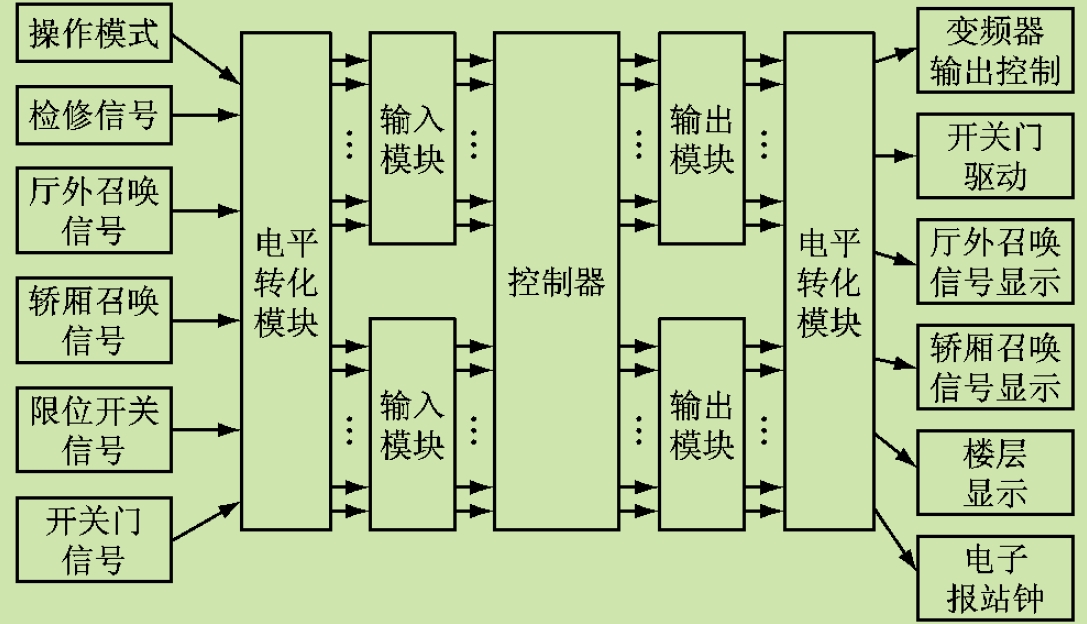
圖2 系統(tǒng)框圖
2.1控制器的選擇
由于系統(tǒng)包含32 點開關(guān)量輸入和31 點開關(guān)量輸出信號,,見表1,、2,系統(tǒng)的程序也不需要占用很大的內(nèi)存,,所以選擇處理器時只要能滿足系統(tǒng)的輸入輸出點數(shù)就可以了,。本系統(tǒng)選用的是美國羅克韋爾公司SLC500 系列的處理器,該處理器模塊化的結(jié)構(gòu)使得硬件設(shè)計更為靈活方便,。
2.2 輸入,、輸出模塊的選擇
如上所述,電梯實驗模型具有32 點的數(shù)字量的輸入端口和31 點的數(shù)字量輸出端口,,所以選用了兩塊型號為1746-IB16 的16 點輸入模塊分別插在機架的1槽和2 槽,,對應(yīng)的輸入地址為1: 1 /0 ~ 1: 1 /15 和1: 2 /0~ 1: 2 /15; 兩塊型號為1746-OB16 的16 點輸出模塊,分別插在機架的3 槽和4 槽,,對應(yīng)的輸出地址為0: 3 /0 ~ 0: 3 /15 和0: 4 /0 ~ 0: 4 /15,。由于電梯模型提供的信號電平邏輯剛好和SLC 輸入/輸出模塊的電平相反,故系統(tǒng)中還添加了兩塊電平轉(zhuǎn)換模塊。
各輸入,、輸出信號說明及對應(yīng)的地址詳見表1,、2。
表1 輸入端口說明以及地址表示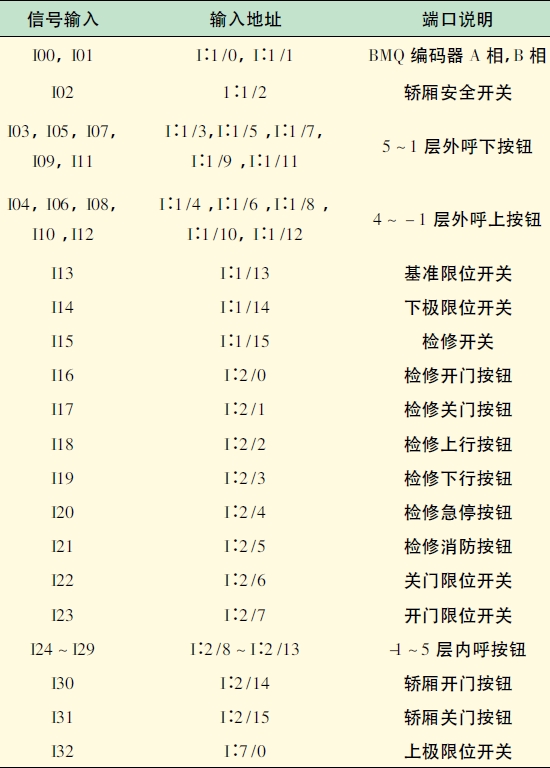
表2 輸出端口說明以及地址表示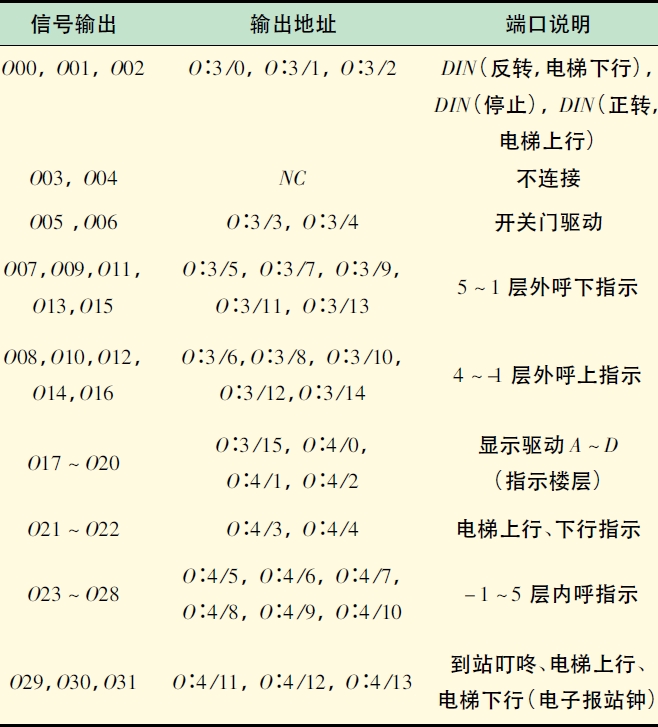
2.3變頻器的配置
本系統(tǒng)采用三菱公司生產(chǎn)的FR-D700 變頻器,,通過改變其相應(yīng)參數(shù)來改變電梯模型拽引機的加速和減速的狀態(tài),,從而實現(xiàn)對電梯模型的拽引機進行變頻調(diào)速。利用S 型曲線對電梯進行控制,,如圖3 所示,。該方式在加速的起始階段,頻率的上升較緩,,電梯加速度a 逐漸變大,,加加速度ρ 為一恒定值。如AE 段所示,,在電梯達到勻速運行之前,,電梯加速度逐漸減小。BC端電梯進入穩(wěn)定運行狀態(tài),,此時電梯勻速上升,。電梯的減速過程與加速過程類似。
通過修改變頻器相關(guān)參數(shù)以及對變頻器STF端( 0: 3 /0) 和STR 端( 0: 3 /2) 的控制,,可以讓電梯在上,、下行時達到圖3 所示的運動狀態(tài)。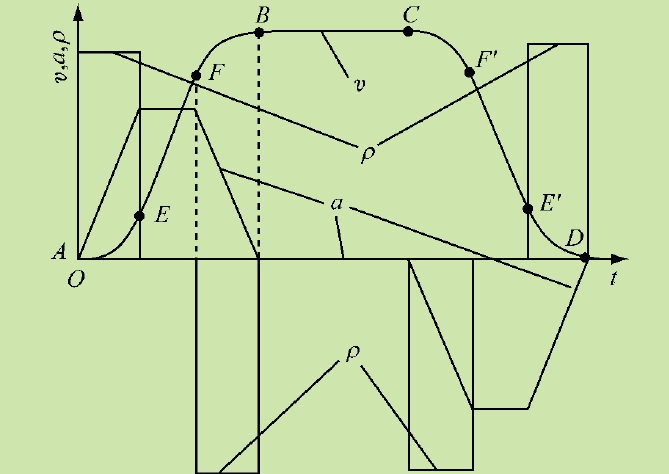
圖3 速度控制曲線
3,、控制系統(tǒng)的程序設(shè)計
3.1主控程序的設(shè)計
電梯實訓模型的控制程序設(shè)計比較復雜靈活,,可以分為檢修模式和正常運行模式,對于正常運行模式來講,,其程序的設(shè)計又可以分為轎廂內(nèi)外信號登記與顯示,、zui大值登記、zui小值登記,、電梯選向,、順向截梯、轎廂開關(guān)門等部分,,因此在程序設(shè)計中,,我們將整個程序分為多個模塊,分別進行單獨的設(shè)計與調(diào)試,,zui后將不同的模塊拼接起來進行綜合調(diào)試,。圖4 為系統(tǒng)主控程序的控制流程圖,。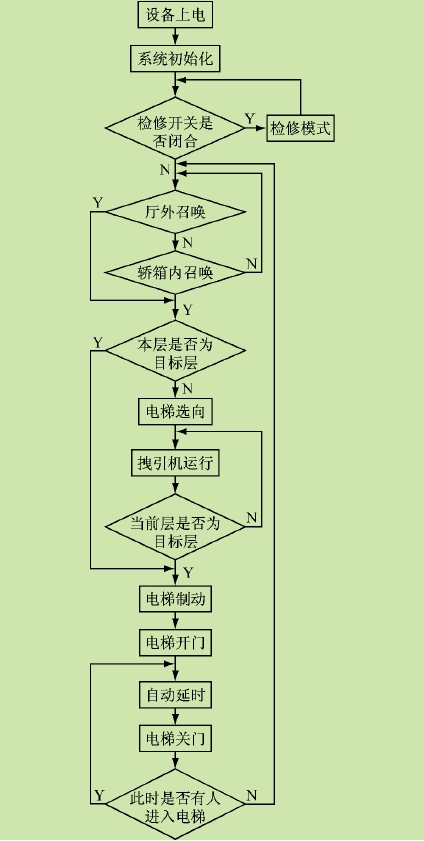
圖4 主程序流程圖
3.2電梯選向以及順向截梯程序設(shè)計通過控制變頻器正反轉(zhuǎn)輸出,可以控制電梯上行或者下行運行,,且電梯上升或下降一定樓層數(shù),,對變頻器STF 或者STR 端控制時間是固定的,通過測試分別為: 一層4.45s; 兩層8.90s; 三層13.35s; 四層17.80s; 五層22.25s,?;诖耍覀冊O(shè)計了相應(yīng)的電梯選向與順向截梯程序,。
圖5 為電梯上行選向控制程序,,其中N7: 10 存儲的zui初所在樓層信號。當電梯向上運行時,,B3: 2 /0 處于閉合狀態(tài),,就不允許電梯低層的召喚信號與zui低選層信號進行比較,只有當電梯上升到已登記的zui高層時,,才允許電梯下行與zui低選層信號進行比較,。電梯下行的選向控制與上行選向控制程序有相同的結(jié)構(gòu)。
圖6 為電梯上行順向截梯1 層的判斷程序,。利用RTO 計時器指令,,我們可以由zui高選層信號N7: 6 與zui初所在層N7: 10,計算得到電梯上行總共所需的時圖5 電梯選向控制( 電梯上行判斷) 的梯形圖程序圖6 電梯上行順向截梯設(shè)計( 1 層為例) 的梯形圖程序間,,并將其作為T4: 0 的預設(shè)值,同時在電梯運行當中我們也仍可以對預設(shè)值進行刷新,,只要更高樓層有召喚信號,。電梯的平層動作由電梯zui初所在層與召喚信號所在層之差計算而得,N10: 1 中存儲了電梯從zui初層上行到該層所需時間,,當這個時間與RTO 中得累計值相同時,,電梯停止并跳轉(zhuǎn)到轎廂的自動開關(guān)門程序。
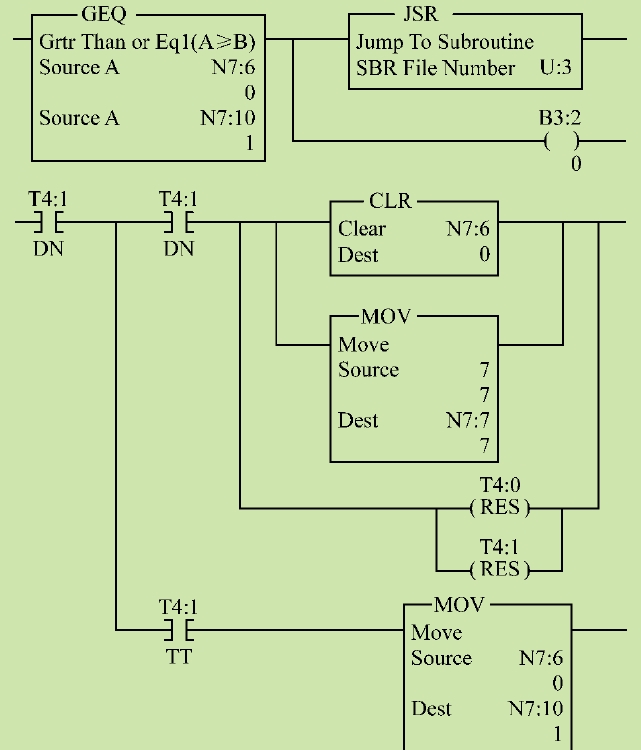
圖5 電梯選向控制( 電梯上行判斷) 的梯形圖程序
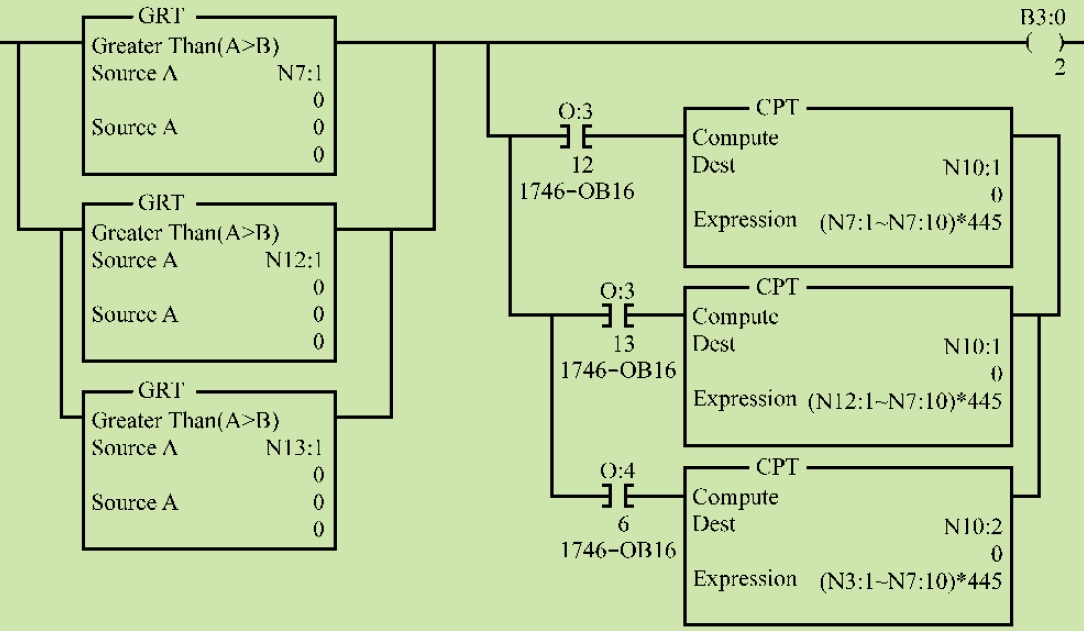
圖6 電梯上行順向截梯設(shè)計( 1 層為例) 的梯形圖程序
3.3上位機監(jiān)控程序的設(shè)計
本系統(tǒng)采用Rockwell 公司的RSview32 上位機監(jiān)控軟件,,即為利用RSView32 設(shè)計制作的人機交互界面,。通過通信軟件RSlinx,控制器與上位機之間以O(shè)PC 的方式進行數(shù)據(jù)交換,,這樣就可以利用上位機對電梯進行監(jiān)控,。