IFM包含PMD光飛時(shí)間技術(shù)的O3D 3D 傳感器
光飛時(shí)間 (ToF) 通過(guò)測(cè)量光的光飛時(shí)間,,可以確定單個(gè)像素與目標(biāo)之間的像素級(jí)距離值,。 因此,,3D 信息的生成沒(méi)有任何實(shí)時(shí)迂回,。 zui有名的 ToF 技術(shù)是 PMD(光子混頻器件)。
PMD 光飛時(shí)間技術(shù)只需一張 23,232 像素,、沒(méi)有運(yùn)動(dòng)模糊的三維圖像即可確保場(chǎng)景和物體的檢測(cè),。 場(chǎng)景由經(jīng)調(diào)制的不可見(jiàn)紅外光照明,反射回的光線由 PMD 傳感器拾取,。
包含 PMD 光飛時(shí)間技術(shù)的 O3D 3D 傳感器1 | 
| 紅外 LED 由防刮玻璃保護(hù)的四個(gè)高功率 IR LED (850nm) 照明 O3D 的整個(gè)視場(chǎng),,覆蓋 0.3m 至 5m 的范圍。 |
2 | 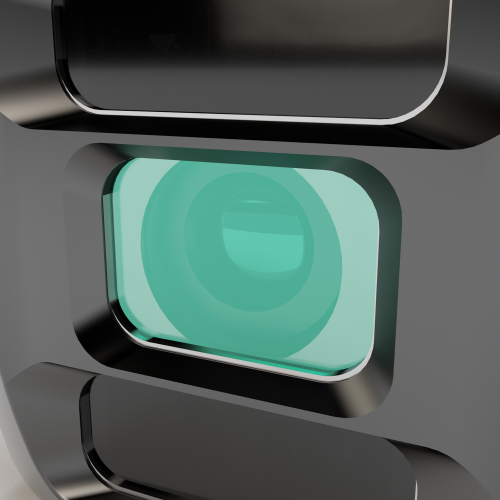
| 鏡頭 鏡頭決定了 O3D 的視場(chǎng),。 70° x 51° ,,60° x 45° 和 40° x 30° 備選件可用于對(duì)應(yīng)用進(jìn)行的調(diào)節(jié)。 |
3 | 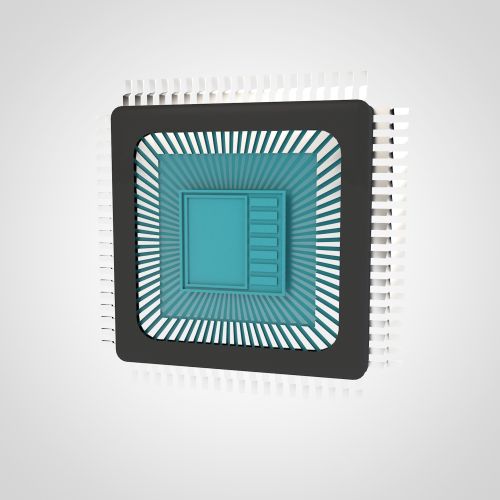
| 光飛時(shí)間圖像傳感器 PMD 光飛時(shí)間圖像傳感器可分辨 176 x 132 像素場(chǎng)景。 傳感器同時(shí)配備有獲得zhuanli的背景抑制功能,,使其不會(huì)因應(yīng)用環(huán)境中光照條件的變化而受到影響,。 |
4 | 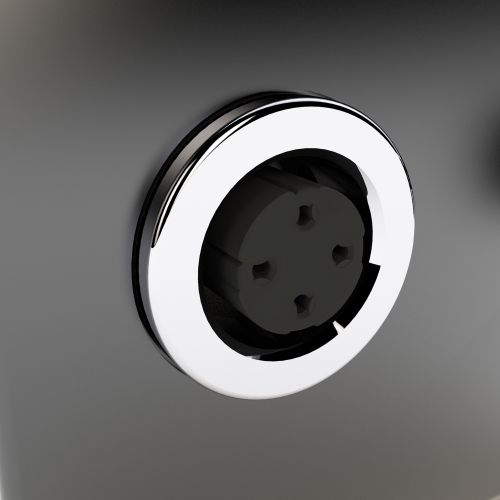
| M12 以太網(wǎng)過(guò)程數(shù)據(jù)接口 M12 以太網(wǎng)接口可用于設(shè)定傳感器參數(shù),也可用于通過(guò)工業(yè)以太網(wǎng) (TCP/IP & EIP) 進(jìn)行傳出數(shù)據(jù)的通信,。 參數(shù)的設(shè)定可使用免費(fèi)的 ifm Vision Assistant 進(jìn)行,。 |
5 | 
| M12 電源供應(yīng)器 8 插腳 M12 連接器既可用于傳感器的電源供應(yīng),也是用于數(shù)字和模擬輸出的接口,。 |
IFM包含PMD光飛時(shí)間技術(shù)的O3D 3D 傳感器



