 化工儀器網(wǎng)
化工儀器網(wǎng)
公司動態(tài)
相關(guān)技術(shù)名稱解釋 (三)蘇州伊洛自動化科技有限公司
閱讀:1116 發(fā)布時間:2017-5-17持續(xù)時間(Elaspsed Time) 術(shù)語種類:數(shù)顯表說明
從該數(shù)值zui后一次重置后,報警1在數(shù)顯表上觸發(fā)后的總的積累時間,,該時間長度不包括報警條件消失后的時間,,該持續(xù)時間參數(shù)不受報警 2和報警 3影響。
同時參見報警動作,,超越時間和數(shù)顯表,。
 串級控制(Cascade Controll) 術(shù)語種類:控制器說明
串級控制(Cascade Controll) 術(shù)語種類:控制器說明
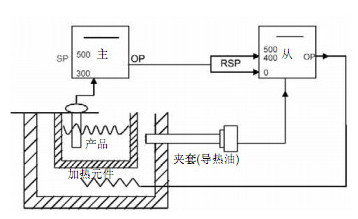
對于存在兩個或多個容器緩沖的控制對象(舉例:通過夾套間接加熱),使用單個儀表來控制就顯得比較困難,,經(jīng)常出現(xiàn)超調(diào)和滯后的問題,,這時的解決方案就是使用串級控制,將2個或多個控制器串聯(lián)起來,,各自監(jiān)控不同的過程變量,,形成一個整體。產(chǎn)品的設(shè)定點溫度被設(shè)置在主控制器上,,將這個設(shè)定溫度與產(chǎn)品的實際溫度對照,,形成主控制器的PID輸出(mA或VDC)作為從站的遠程設(shè)定點使用。這個遠程設(shè)定點(RSP,外給定),,可以根據(jù)需要任意標(biāo)定,。理想狀態(tài)下,從控回路的響應(yīng)時間應(yīng)至少比主控回路快5倍,。
此例中,,從控RSP的zui大輸入代表400℃,以限制夾套的溫度,,啟動時,,主控制器將產(chǎn)品溫度(=環(huán)境溫度)與它的設(shè)定點(300℃)進行對比,,由于偏差很大,主控制器的輸出達到zui大,,這樣就在從控制器上設(shè)置了一個 400℃的遠程設(shè)定點,,從控制器將這個溫度值與夾套溫度(環(huán)境溫度)進行對比,由于偏差很大,,加熱元件以zui大加熱功率工作,。
從控制器的輸出會隨著夾套溫度的上升而逐步下降。與此同時,,產(chǎn)品溫度也會隨著夾套溫度的上升而逐步上升(升溫速度取決于夾套和產(chǎn)品之間的傳輸滯后),這樣又會引起主控制器的輸出下降,,降低從控制器“夾套溫度”的遠程設(shè)定點,從而有效地降低了加熱器的輸出功率,,這個過程不斷進行直到整個系統(tǒng)達到平衡為止,。
整定時,首先將主控制器設(shè)置為手動,,只用比例控制功能調(diào)整從控制器(一般不需要I和D),,然后將主控制器切換回自動模式,再調(diào)整主控制器,。這樣調(diào)整的結(jié)果就是,,即實現(xiàn)了快速、平滑的控制過程,,又能使超調(diào)達到zui小具有適應(yīng)負載變化的能力,,而夾套溫度的變化如終保持在可接受的范圍之內(nèi)。
同時參見手動模式,,主機和從站,,PID,遠程設(shè)定點,,遠程設(shè)定點下限值,,遠程設(shè)定點上限值,設(shè)定點,,設(shè)定點選擇和整定功能,。
串行通信選項(Serial Communications Option) 術(shù)語種類:基本定義
該功能可以讓其它裝置,比如 PC,、PLC 或主控制器等,,通過 RS 485 串行接口去讀取或修改儀表參數(shù),詳細情況可以在本手冊的串行通信部分找到,。
同時參見控制器,,數(shù)顯表,主/從機制,限值控制器和PLC,。
電磁閥(Solenoid Valve) 術(shù)語種類:基本定義
這是一個用于控制氣體或液體流動的機電裝置,,一般只有兩種狀態(tài),開啟或關(guān)閉,,平時通過一個彈簧使閥門處于關(guān)閉的狀態(tài),,當(dāng)線圈通電時,電磁閥克服彈簧的彈力將閥門打開,。一般來說,用來控制電磁閥的信號,,是由配有時間比例輸出功能的標(biāo)準(zhǔn)過程控制器發(fā)出的,。
電磁閥經(jīng)常用于大/小火氣體燃燒器。旁路閥會持續(xù)供應(yīng)一些燃氣,,但這些燃氣的量不能滿足加熱工藝所需的額定熱量(小火狀態(tài)),,在工藝過程需要增加熱量時(大火狀態(tài)),控制器就會輸出一個打開電磁閥的信號,。
同時參見調(diào)節(jié)閥和時間比例控制功能
電動閥門驅(qū)動控制(Valve Motor Drive Control) 術(shù)語種類:VMD控制器說明
電動閥門驅(qū)動控制器是用來控制調(diào)整閥的,,控制時需要使用的“開環(huán)”電動閥門驅(qū)動(VMD)PI 控制算法,當(dāng)過程值比所需的參數(shù)設(shè)定點值高或低的時候,,就可以提供輸出信號將閥門進一步打開,,或進一步關(guān)閉,到達設(shè)定點時,,除非是負載條件發(fā)生了變化,,一般就不需要輸出信號來保持控制狀態(tài)了,這就是大家知道的 3 點步進式控制,。如果安裝了輔助輸入選項模塊,,并且作了相應(yīng)的設(shè)置,就可以顯示閥門位置或流量,。
同時參見輔助輸入,,調(diào)整閥,開環(huán) VMD,,PI控制,,PID,設(shè)定點和閥門位置指示,。
電動控制閥(Modulating Vave) 術(shù)語種類:VMD控制器說明
一種通過電動機驅(qū)動,,閥門開度可以固定在全開與全關(guān)之間任意位置的閥門。
其典型應(yīng)用就是燃氣加熱工業(yè)爐的溫度控制,,通常需要與 VMD 閥門控制器配合使用,,將燃氣的閥門控制在所需的開度。
有些控制閥的電動機需要線性(mA 或者 VDC)信號來對閥門進行定位,此時需要使用標(biāo)準(zhǔn)的過程控制器(使用 PI控制)來代替 VMD控制器,。
同時參見電動機行程時間,,PI控制和閥門電機驅(qū)動控制。
電機行程時間(Motor Travel Time) 術(shù)語種類:VMD控制器參數(shù)
電機行程時間是閥門開度從一端運行到另一端所需的時間,,閥門電動驅(qū)動控制算法使用此參數(shù)來計算開閥或關(guān)閥時通電時間的長短,,實現(xiàn)對過程參數(shù)的控制。
此項設(shè)置必須準(zhǔn)確,,否則會影響控制效果,。行程時間在閥門的說明書中應(yīng)有詳細說明,也可以向供應(yīng)商或制造商咨詢索取,。如果無法從*途逕得到這些信息,,請自行檢測閥門從全開到全關(guān)所需的時間。(將控制器設(shè)置為手動模式,,調(diào)整其輸出),。
顯示代碼= , 默認(rèn)設(shè)置=1.00,。
, 默認(rèn)設(shè)置=1.00,。
同時參見手動模式啟用,,zui小電動機通電時間和閥門電機驅(qū)動控制。
調(diào)整(Tuning) 術(shù)語種類:控制器說明
PID 控制器必須調(diào)整到與工藝相適應(yīng),,使它們能夠達到*的控制水平,,在調(diào)整過程中要進行調(diào)整,可以手動,,也可以使用控制器的自動調(diào)整功能,;如果控制器配置成 On-Off開關(guān)控制模式,就不需要使用調(diào)整功能了,。
同時參見自動重置,,自動自整定,On-Off開關(guān)控制,,PID,,自整定,主比例帶,,速率,,自調(diào)整和輔比例帶。
多點標(biāo)定功能啟用(Multi-Point Scaling Enable) 術(shù)語種類:數(shù)顯表參數(shù)
在配置模式下,,設(shè)定 可以啟用數(shù)顯表的多點式標(biāo)定功能,,zui多可以規(guī)定 9 個斷點,對輸入信號進行線性處理,,但這只適用于 mA,,mV 或 V 輸入型信號,,在每一個斷點處,先輸入一個標(biāo)準(zhǔn)值,,然后輸入斷點處的顯示值,。
可以啟用數(shù)顯表的多點式標(biāo)定功能,,zui多可以規(guī)定 9 個斷點,對輸入信號進行線性處理,,但這只適用于 mA,,mV 或 V 輸入型信號,,在每一個斷點處,先輸入一個標(biāo)準(zhǔn)值,,然后輸入斷點處的顯示值,。
顯示代碼= , 默認(rèn)設(shè)置=
, 默認(rèn)設(shè)置= ,。
,。
同時參見數(shù)顯表,,多點標(biāo)定設(shè)置和過程變量。

更多產(chǎn)品了解,,請咨詢 蘇州伊洛自動化科技有限公司 客服,。
蘇州伊洛自動化科技有限公司竭誠為您服務(wù)!