化工儀器網(wǎng)
化工儀器網(wǎng)
技術(shù)文章
FP-XH系列運(yùn)動型控制單元 晶體管輸出 AFPXHM4T16T
閱讀:1128 發(fā)布時(shí)間:2021-6-22
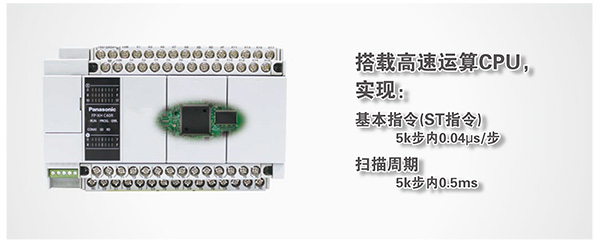
高功能運(yùn)動控制一體機(jī)。
|


 |
特點(diǎn)
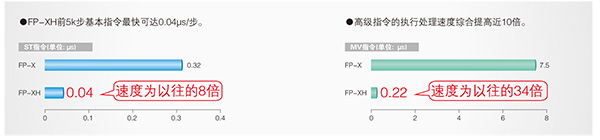
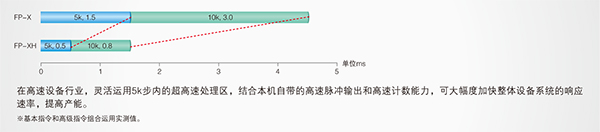
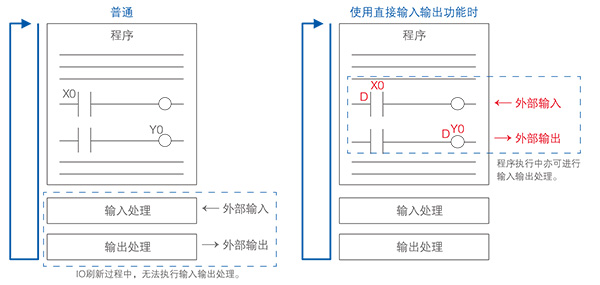
高速
|
|
|
|
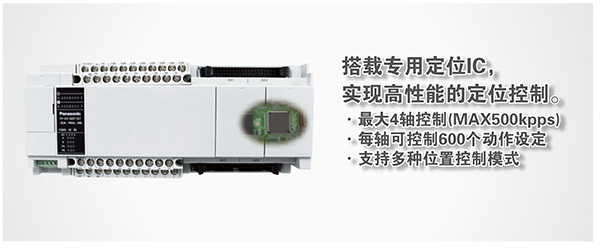
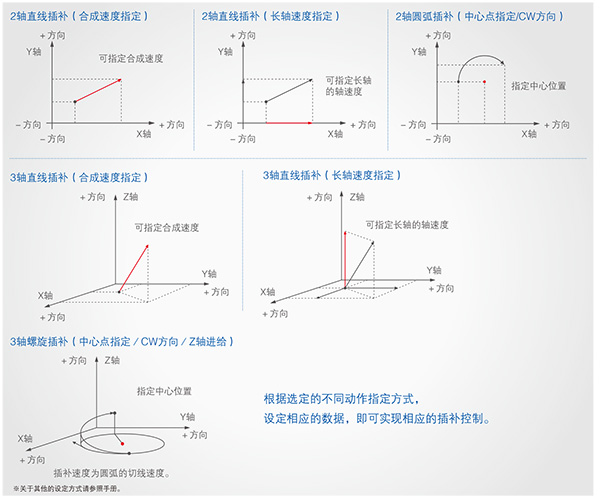
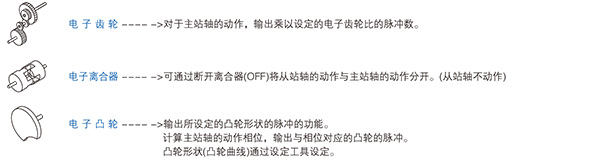
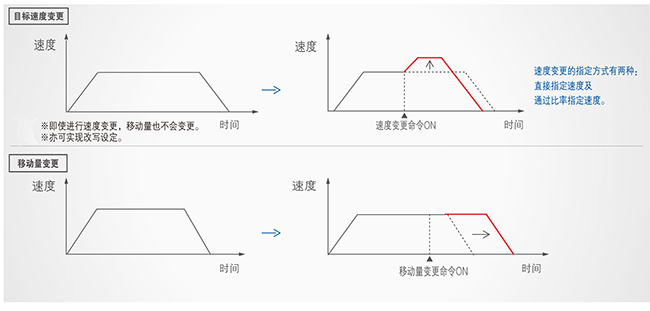
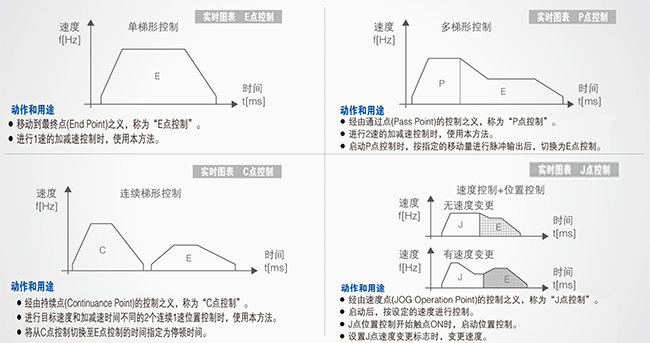
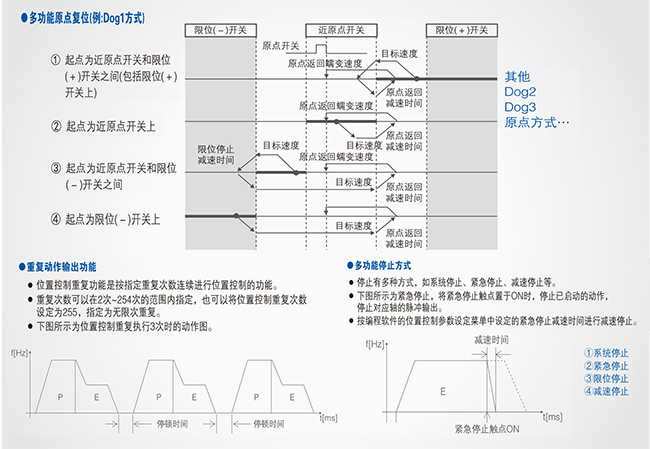
運(yùn)動型位置控制
|
|
|
|
通用型位置控制
|
|
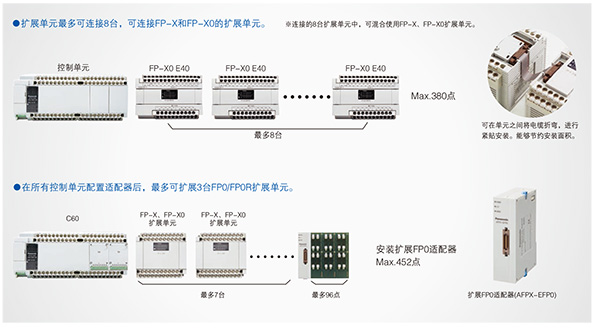
擴(kuò)展性
|
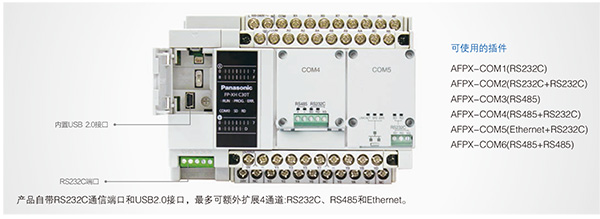
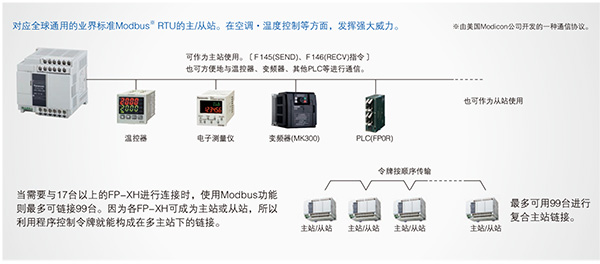
通信
|
|
|

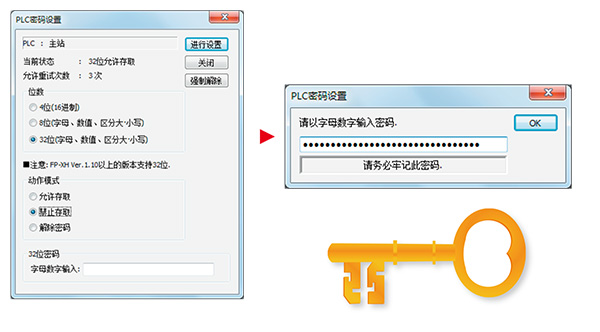
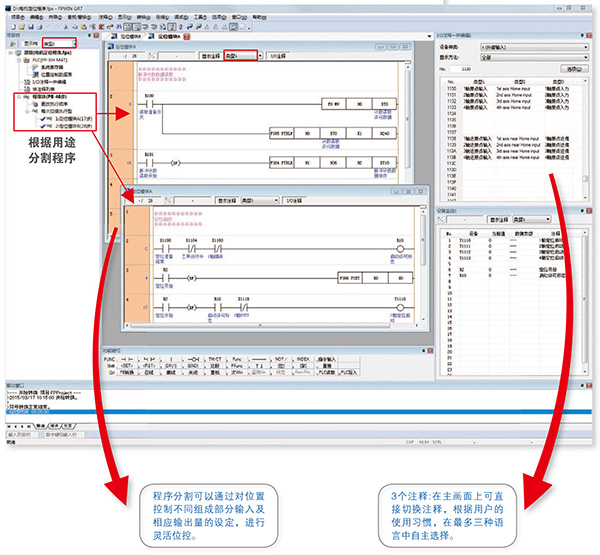
編程軟件
以更專業(yè)的功能軟件FPWIN GR7為基礎(chǔ)架構(gòu),,后續(xù)將不斷豐富更多功能,面向各行業(yè)應(yīng)用擴(kuò)展更專業(yè)的命令內(nèi)容,。
(通用型Ver.2.5以上對應(yīng),運(yùn)動型Ver.2.7以上對應(yīng))
|

|
|
|
|
|
|

|
|