 您好, 歡迎來(lái)到化工儀器網(wǎng)
您好, 歡迎來(lái)到化工儀器網(wǎng)

產(chǎn)品分類品牌分類
-
電磁流量計(jì) 流量計(jì)選型 泥漿流量計(jì) 煤氣流量計(jì) 煙氣流量計(jì) 硫酸流量計(jì) 沼氣流量計(jì) 楔形流量計(jì) 氣體質(zhì)量流量計(jì) 超聲波明渠流量計(jì) 氣體渦輪流量計(jì) 噴嘴流量計(jì) 智能流量計(jì) v錐流量計(jì) 熱式氣體質(zhì)量流量計(jì) 旋進(jìn)旋渦流量計(jì) 壓縮空氣流量計(jì) 液體流量計(jì) 轉(zhuǎn)子流量計(jì) 浮子流量計(jì) 污水流量計(jì) 蒸汽流量計(jì) 氣體流量計(jì) 孔板流量計(jì) 渦輪流量計(jì) 金屬管浮子流量計(jì) 渦街流量計(jì) 超聲波流量計(jì)
超聲波液位計(jì)進(jìn)行液位檢測(cè)的設(shè)計(jì)方案交流分享
超聲波測(cè)距是一種利用超聲波的可定向發(fā)射,方向性好,,在介質(zhì)中傳播距離較遠(yuǎn)等特性,,結(jié)合電子計(jì)數(shù)等微電子技術(shù)來(lái)實(shí)現(xiàn)的檢測(cè)方式,。在使用中不受光線、電磁波,、被測(cè)物的顏色等因素影響,,加之信息處理簡(jiǎn)單、成本低,、速度快,。在避障、車輛定位與導(dǎo)航,、液位測(cè)量等領(lǐng)域得到了廣泛的應(yīng)用,。但由于超聲波在兩種不同屬性的介質(zhì)(如固液、固氣)中的傳播特性存在較大差異,。例如K級(jí)超聲波在氣態(tài)介質(zhì)中傳播效果好,,衰減也相對(duì)較小,但在固態(tài)和液態(tài)介質(zhì)中則衰減就比較大了,。而M級(jí)超聲波則正好相反,。因而在一些需要透過(guò)兩種或兩種以上的介質(zhì)進(jìn)行測(cè)距時(shí),超聲波就存在很大的困難了,。但在一些比較特殊的場(chǎng)合,,應(yīng)用超聲波進(jìn)行檢測(cè)也是目前***可行的手段。本文中所描述的一款超聲波液位計(jì)的設(shè)計(jì)目標(biāo)就是對(duì)密閉容器在不開(kāi)蓋,、不另加額外裝置的情況下,,對(duì)容器內(nèi)部液體檢測(cè)的一種設(shè)備。對(duì)于如何進(jìn)行檢測(cè)的過(guò)程本文不做過(guò)多陳述,,只對(duì)在設(shè)計(jì)的過(guò)程中,,是如何有針對(duì)性的進(jìn)行軟硬件結(jié)合設(shè)計(jì),從而降低誤差,、提高精度的,,供各位同仁參考。
1 合理采用門(mén)閥設(shè)計(jì),,減小盲區(qū)*,,使用超聲波液位計(jì)測(cè)距的原理主要是檢測(cè)回波與發(fā)射波之間時(shí)間差Δt,即:Δt = tn-tn-1
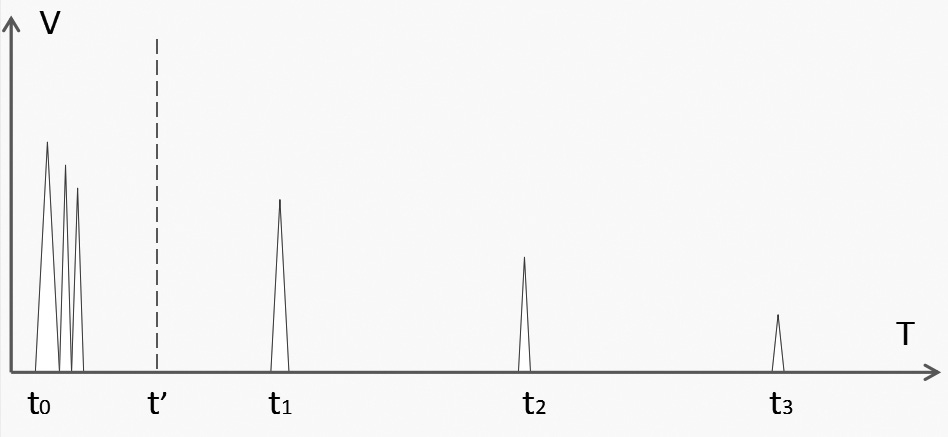
其中:t0為發(fā)射波或稱始波觸發(fā)計(jì)時(shí)器時(shí)間,;tn為各回波觸發(fā)計(jì)時(shí)器時(shí)間,。如圖1所示。
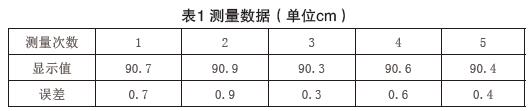
圖1 超聲檢測(cè)波形示意圖如圖1所示,,在實(shí)際檢測(cè)的過(guò)程中,,我們可以發(fā)現(xiàn),在始波附近,,存在大量的干擾波,,主要是由于容器壁的多次反射形成的干擾,。
當(dāng)被測(cè)液體高度比較低時(shí),可能會(huì)造成多個(gè)超聲波液位計(jì)回波湮沒(méi)在始波附近的干擾波中,,而且不容易識(shí)別出有效的回波信號(hào)tn來(lái),。合理有效的門(mén)閥t的設(shè)置,就很好的解決了這一問(wèn)題,。在整個(gè)系統(tǒng)設(shè)計(jì)的過(guò)程中,,我們?cè)O(shè)計(jì)的是每40ms發(fā)射一個(gè)始波。通過(guò)大量的實(shí)驗(yàn)檢測(cè),,***后我們把門(mén)限設(shè)置為2ms,。也就是說(shuō)當(dāng)始波觸發(fā)計(jì)時(shí)器后,計(jì)時(shí)器自動(dòng)關(guān)閉2ms,,然后打開(kāi)計(jì)時(shí)器,,開(kāi)始接收回波。這里需要注意的是,,由于容器內(nèi)液體的多少是未知的,,也就是說(shuō),此時(shí)測(cè)得的***個(gè)回波t1,,不一定是真實(shí)的***個(gè)回波,,因?yàn)楫?dāng)液位比較低的時(shí)候,前幾個(gè)回波很可能被門(mén)閥給過(guò)濾掉了,。此時(shí)就需要比較回波時(shí)間差Δtn了,,Δtn = tn-tn-1 。當(dāng)前后兩個(gè)Δt1和Δt2相差在一定范圍內(nèi),,則可認(rèn)為t1為***個(gè)回波,,此時(shí)Δt可以取其中任一個(gè)。否則Δt只能取Δt2,。當(dāng)液位比較高時(shí),系統(tǒng)在一個(gè)檢測(cè)周期內(nèi)可能只能檢測(cè)到一個(gè)回波,,此時(shí)的t1必然是***個(gè)回波,。
由于受系統(tǒng)及其他軟硬件條件所限,我們這個(gè)系統(tǒng)的檢測(cè)盲區(qū)大概在5ms左右,。
2 定標(biāo)模塊,,去除溫度、介質(zhì)等影響
*,,溫度對(duì)超聲波液位計(jì)的超聲波在介質(zhì)中傳播速度有較大影響,。一般來(lái)說(shuō),溫度越高,,超聲波在介質(zhì)中的傳播速度越快,。例如,,超聲波在空氣中的傳播速度可以表示為:C=331+0.6T。其中T為環(huán)境溫度,。也就是說(shuō)在空氣中溫度每上升1°,,超聲波的傳播速度都要增加0.6m/s。實(shí)驗(yàn)證明,,在固體和液體介質(zhì)中,,超聲波傳播亦是如此。不同的介質(zhì)中,,超聲波的傳播速度也是不相同的,。比如實(shí)驗(yàn)測(cè)得的結(jié)果表明,在汽油中,,超聲波的傳播速度大約在1300m/s上下,,而在水中則在1400m/s左右。計(jì)時(shí)器1μs就會(huì)產(chǎn)生超過(guò)1個(gè)毫米的誤差,。
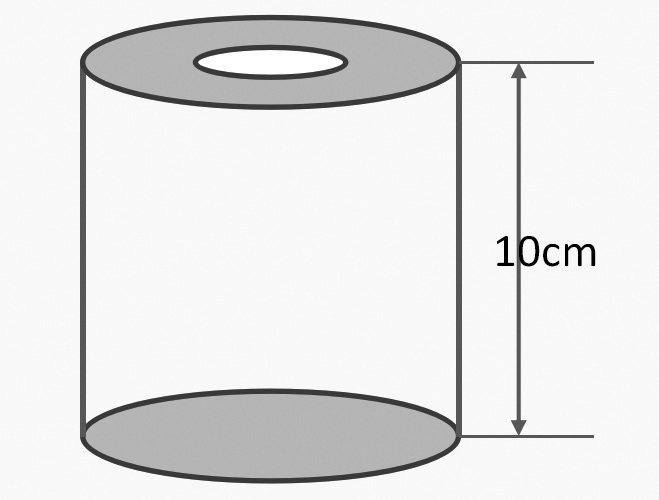
從上面的表述中可以看出,,溫度和介質(zhì)對(duì)超聲波液位計(jì)測(cè)量結(jié)果影響也是很大的??紤]到即使是同一介質(zhì),,其濃度和溫度等因素對(duì)結(jié)果影響也是不可忽視的。正式由于諸多復(fù)雜的原因存在,,并沒(méi)有哪個(gè)專業(yè)機(jī)構(gòu)能夠給出超聲波在每種介質(zhì)中的具體傳播速度數(shù)值,。正所謂繆之毫厘差之千里。為此,,我們另辟蹊徑,,設(shè)計(jì)了一個(gè)定標(biāo)模塊。如圖2所示,。
該定標(biāo)模塊為一中空的圓柱體結(jié)構(gòu),,其內(nèi)部底部距離上頂部外延高度設(shè)計(jì)為10cm,設(shè)計(jì)誤差為±10μm(受工藝所限,,精度無(wú)法更高了),。其思路為,當(dāng)我們需要測(cè)量某一容器內(nèi)液位時(shí),,取與該容器內(nèi)液體注滿定標(biāo)模塊,。打開(kāi)液位檢測(cè)儀,首先測(cè)量該模塊,,由于高度已知,,可比較精準(zhǔn)的測(cè)得在當(dāng)前環(huán)境下該液體的速度值。然后再用此速度值去測(cè)量密閉容器的液位,。
此方法看似笨拙繁瑣,,但在實(shí)際應(yīng)用中我們可以看到,,通過(guò)這一定標(biāo)模塊的方法,基本消除了溫度和介質(zhì)的影響,,大大地提高了檢測(cè)精度和準(zhǔn)確度,。3 軟件處理,進(jìn)一步提高精準(zhǔn)度做系統(tǒng)設(shè)計(jì)的人都知道,,有些誤差因素是系統(tǒng)固有的,,是無(wú)法通過(guò)硬件的改進(jìn)來(lái)消除的。但在系統(tǒng)的軟件設(shè)計(jì)過(guò)程中,,我們可以通過(guò)一定的方法和算法進(jìn)一步降低誤差,。方法之一就是對(duì)測(cè)得的數(shù)據(jù)進(jìn)行進(jìn)一步判斷、求均值,。首先是判斷,。從圖1的波形所示來(lái)看,在一定的距離內(nèi)(我們這套系統(tǒng)大約在1m),,回波是能夠接收到兩個(gè)或兩個(gè)以上的回波的,。如果回波超過(guò)兩個(gè),我們就取***和第二個(gè)的差值和第二個(gè)和第三個(gè)的差值作比較判斷并取均值備用,。如果回波只有兩個(gè),,則取第二個(gè)差值做備用。如果只有一個(gè)回波,,那就沒(méi)的選擇了,。
其次求均值。我們采取的每40ms發(fā)射一個(gè)發(fā)射波,,也就是說(shuō),,超聲波液位計(jì)系統(tǒng)是每40ms測(cè)量一次數(shù)據(jù),我們采取的方法并不是每組數(shù)據(jù)直接送顯,,而是采用每測(cè)得20組數(shù)據(jù)送顯一次,。在取得20組數(shù)據(jù)后,系統(tǒng)首先去除兩個(gè)較大的值,,再去除兩個(gè)較小的值,,然后把余下的16組數(shù)據(jù)求均值,然后送顯示器顯示,。至于為什么是16組,搞過(guò)單片機(jī)的都知道,。軟件處理方法之二是主動(dòng)消除固有偏差,。表1所示為對(duì)高度約為90cm的液位進(jìn)行多次測(cè)量。
通過(guò)以上測(cè)量結(jié)果來(lái)看,,整體測(cè)量值比實(shí)際值大約偏高0.5cm,,因此,,在大約距離為1米左右時(shí),我們通過(guò)把測(cè)得的數(shù)據(jù)均主動(dòng)減去0.5cm,。這樣,,顯示的結(jié)果與實(shí)際值就比較接近了。
軟件處理的方法之三就是注意細(xì)節(jié)處理,。例如像前面所提到的通過(guò)定標(biāo)模塊進(jìn)行定標(biāo)時(shí),,會(huì)得到一個(gè)速度值,這個(gè)值會(huì)給后面的程序進(jìn)行計(jì)算時(shí)使用,。我們?cè)趯?shí)際的操作中雖然在定標(biāo)時(shí)顯示了具體的速度值,,但在后面實(shí)際計(jì)算時(shí),并沒(méi)有直接用這個(gè)值,,而是把測(cè)得的被除數(shù)和除數(shù)分別存儲(chǔ)起來(lái),,在具體計(jì)算時(shí),采用的是乘以被除數(shù),,再除以除數(shù),。這樣在一定程度上又進(jìn)一步減少了計(jì)算誤差。
4 結(jié)束語(yǔ)
本文著重介紹一些在具體使用超聲波液位計(jì)測(cè)量液位的過(guò)程中,,分析了測(cè)距過(guò)程中誤差的產(chǎn)生及減小誤差的方法,。實(shí)踐證明,采用這些方法將大大減小測(cè)量誤差,提高測(cè)量的準(zhǔn)確度。