遠(yuǎn)心度優(yōu)點(diǎn)
快速執(zhí)行可重復(fù)、高準(zhǔn)確性測(cè)量的能力對(duì)很大程度地提高許多機(jī)器視覺(jué)系統(tǒng)的性能至關(guān)重要,。對(duì)于這類系統(tǒng),,遠(yuǎn)心鏡頭能夠盡可能獲得很高的準(zhǔn)確性。本部分將討論遠(yuǎn)心鏡頭的*性能特征,,以及遠(yuǎn)心度將如何影響系統(tǒng)性能。

零視場(chǎng)角:視差消除
傳統(tǒng)鏡頭具有視場(chǎng)角,,因此隨著鏡頭與物體之間的距離增加,,放大倍率也會(huì)增加。這是人類視覺(jué)的行為,,有助于我們感知景深,。這一視場(chǎng)角會(huì)導(dǎo)致像差(也稱為角度誤差),這會(huì)降低準(zhǔn)確性,,因?yàn)槿绻矬w由于放大倍數(shù)變化而移動(dòng)(即使其余部分在景深內(nèi)),,則觀察到的視覺(jué)系統(tǒng)測(cè)量值會(huì)改變。遠(yuǎn)心鏡頭可通過(guò)恒定的非視場(chǎng)角消除標(biāo)準(zhǔn)鏡頭的視差特性;遠(yuǎn)心鏡頭在離鏡頭任何距離的位置都具有相同的視場(chǎng),。有關(guān)非遠(yuǎn)心和遠(yuǎn)心視場(chǎng)的差別,,請(qǐng)參見(jiàn)圖1。
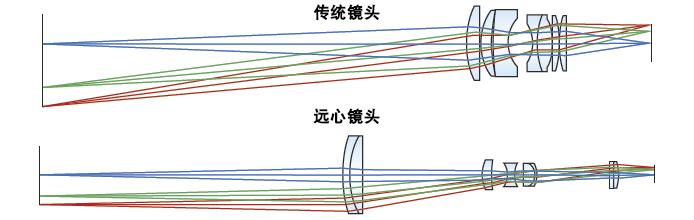
圖1:傳統(tǒng)和遠(yuǎn)心鏡頭的視場(chǎng)對(duì)比,。請(qǐng)注意傳統(tǒng)鏡頭的視場(chǎng)角和遠(yuǎn)心鏡頭的零視場(chǎng)角,。
遠(yuǎn)心鏡頭的恒定視場(chǎng)對(duì)計(jì)量應(yīng)用有利有弊。遠(yuǎn)心鏡頭的主要優(yōu)勢(shì)在于其放大倍率不會(huì)隨景深而更改,。圖2顯示了兩個(gè)由固定焦距(非遠(yuǎn)心)鏡頭(中)和遠(yuǎn)心鏡頭(右)在不同工作距離下成像的不同物體,。請(qǐng)注意,在使用遠(yuǎn)心鏡頭拍攝的圖像中,,無(wú)法分辨哪個(gè)物體位于其他物體之前,。使用固定焦距鏡頭時(shí),很明顯,,看起來(lái)更小的物體離鏡頭更遠(yuǎn),。
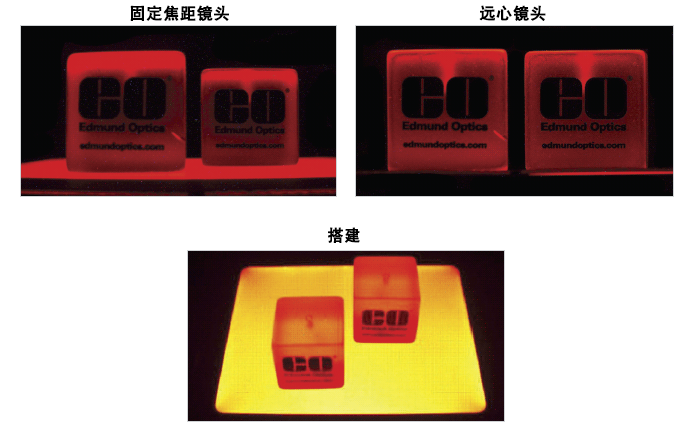
圖2:固定焦距鏡頭的視場(chǎng)角可轉(zhuǎn)化為圖像中的視差,導(dǎo)致兩個(gè)立方體顯示為不同大小,。
盡管圖2的工作距離變化劇烈,但它描述了盡可能減少像差的重要性,。許多自動(dòng)化檢測(cè)任務(wù)是移經(jīng)成像系統(tǒng)視場(chǎng)的成像物體,,而且部件位置很少是完美的可重復(fù)點(diǎn)。如果鏡頭成像的每個(gè)物體的工作距離都各不相同,,則每個(gè)物體的測(cè)量結(jié)果會(huì)由于放大倍率變化而變化(請(qǐng)參見(jiàn)物體空間分辨率中關(guān)于放大倍率及其定義方式的內(nèi)容),。基于放大倍率校準(zhǔn)誤差(這是固定焦距鏡頭不可避免的情況)輸出不同結(jié)果的機(jī)器視覺(jué)系統(tǒng)是一個(gè)不可靠的解決方案,,不能在需要高準(zhǔn)確性時(shí)使用,。遠(yuǎn)心鏡頭可消除原本會(huì)由于振動(dòng)輸送機(jī)或部件位置不準(zhǔn)確等因素導(dǎo)致的測(cè)量誤差問(wèn)題。
遠(yuǎn)心鏡頭和景深
一個(gè)常見(jiàn)的誤解是遠(yuǎn)心鏡頭天生就具有比傳統(tǒng)鏡頭更大的景深,。盡管景深仍終由鏡頭的波長(zhǎng)和f/#控制,,但遠(yuǎn)心鏡頭由于優(yōu)良焦點(diǎn)任意一側(cè)存在對(duì)稱模糊,確實(shí)可以有比傳統(tǒng)鏡頭更大的可用景深,。由于受檢測(cè)部件會(huì)靠近或遠(yuǎn)離鏡頭偏移,,因此它會(huì)遵循與其關(guān)聯(lián)的視場(chǎng)角(或主光線)。在非遠(yuǎn)心鏡頭中,,將物體移入或移出焦點(diǎn)時(shí),,部件會(huì)由于視差以及與其視場(chǎng)角關(guān)聯(lián)的放大倍率更改而產(chǎn)生對(duì)稱的模糊區(qū)域。但是,,遠(yuǎn)心鏡頭在沒(méi)有視場(chǎng)角度分量時(shí),,會(huì)產(chǎn)生對(duì)稱的模糊圖案,。實(shí)際上,這意味著邊緣等特性會(huì)保留其質(zhì)心位置,;當(dāng)物體在優(yōu)良焦點(diǎn)以外時(shí),,只要保持足以支持機(jī)器視覺(jué)系統(tǒng)所使用的算法正常運(yùn)行的對(duì)比度,就仍然可以進(jìn)行準(zhǔn)確的測(cè)量,。
盡管這似乎有悖常理,,但在某些應(yīng)用中,模糊可以給遠(yuǎn)心鏡頭帶來(lái)有益的效用,。例如,,如果機(jī)器視覺(jué)系統(tǒng)需要找到針腳的中心位置(如圖3a所示),當(dāng)鏡頭聚焦時(shí),,從白色到黑色的過(guò)渡會(huì)十分急劇,。在圖3b中,顯示的相同針腳稍微有些散焦,。
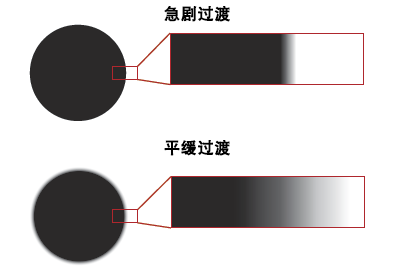
圖3:聚焦和失焦成像的同一針腳,。請(qǐng)注意,從白色過(guò)渡為黑色時(shí)覆蓋的像素量比鏡頭略微失焦(b)時(shí)覆蓋的像素量多出許多,。這可能很有好處,!
查看從部件邊緣提取的線條輪廓的圖像灰度繪圖(如圖4所示),隨著針腳邊緣分布在多個(gè)像素上,,略微散焦的圖像的線條斜率要平緩得多,。由于遠(yuǎn)心鏡頭會(huì)產(chǎn)生對(duì)稱的模糊,因此該模糊圖案仍然可用,,因?yàn)閳D心尚未移動(dòng),,而且需要的子像素插值量有所降低。這降低了由于傳感器噪聲而導(dǎo)致的灰度波動(dòng)敏感性,,并且能夠更加可靠,、重復(fù)多次找到針腳中心位置。
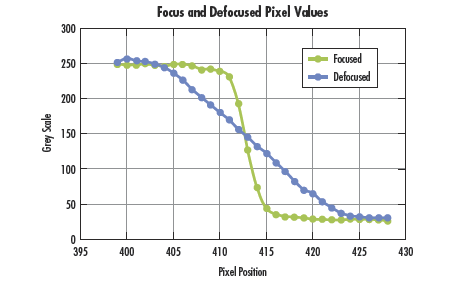
圖4:顯示聚焦和散焦邊緣斜率差異的繪圖,。散焦邊緣占據(jù)更多像素,;可以無(wú)需依靠子像素插值,更輕松地查找邊緣,。
遠(yuǎn)心度和失真
在計(jì)量應(yīng)用中使用遠(yuǎn)心鏡頭的另一個(gè)好處在于,,遠(yuǎn)心鏡頭的失真值通常低于固定焦距鏡頭。失真會(huì)導(dǎo)致物體的實(shí)際位置看似位于其他位置,,這可能會(huì)進(jìn)一步降低測(cè)量準(zhǔn)確性(有關(guān)失真的更多信息,請(qǐng)參見(jiàn)失真),。例如,,圖5a顯示了高失真固定焦距鏡頭成像的電路板上的跳針,。失真以及非遠(yuǎn)心鏡頭所固有的視差使朝向圖像邊緣的跳針看似朝中間彎曲。在遠(yuǎn)心鏡頭下查看相同跳針時(shí)(如圖5b所示),,可以明顯看到跳針是直的,。
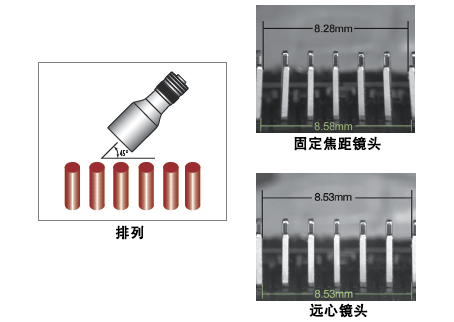
圖5:電路板上的跳針對(duì)比。圖5a顯示了使用固定焦距鏡頭拍攝的圖像,。圖5b顯示了使用遠(yuǎn)心鏡頭拍攝的圖像,。請(qǐng)注意,遠(yuǎn)心圖像中的跳針看起來(lái)并沒(méi)有彎曲,。
盡管確實(shí)可以校準(zhǔn)圖像外的失真以局部提高準(zhǔn)確性,,但視差仍然存在,并且會(huì)導(dǎo)致誤差,。無(wú)需校準(zhǔn)遠(yuǎn)心鏡頭產(chǎn)生的失真的另一個(gè)好處在于可以加快測(cè)量過(guò)程,,因?yàn)檐浖枰獔?zhí)行的計(jì)算更少,這可以減少CPU負(fù)載,,直接導(dǎo)致更高的系統(tǒng)吞吐量,,而且每分鐘測(cè)量的部件更多。
由于遠(yuǎn)心鏡頭往往具有如此低的失真,,因此它們比固定焦距鏡頭更容易產(chǎn)生非單向波形失真(如圖6所示),。盡管失真的程度通常足夠低,不會(huì)對(duì)測(cè)量受檢測(cè)部件產(chǎn)生顯著影響,,但檢查遠(yuǎn)心鏡頭的失真以及適當(dāng)校準(zhǔn)利用遠(yuǎn)心鏡頭的成像系統(tǒng)仍然十分重要,。此屬性也是應(yīng)該使用失真繪圖而非單一數(shù)值的原因,因?yàn)殓R頭可以在被的視場(chǎng)點(diǎn)具有零失真,,但在其他位置具有非零失真,。
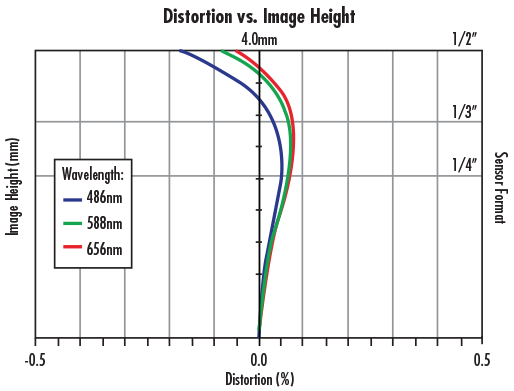
圖6:遠(yuǎn)心鏡頭典型的非單向或波形失真。
在物體平面傾斜的應(yīng)用中,,遠(yuǎn)心鏡頭能夠很好地替代固定焦距鏡頭,,因?yàn)樗鼈兙哂休^低的失真和恒定的放大倍率。也可以傾斜相機(jī),,使傾斜的物體清晰聚焦,;這被稱為沙伊姆弗勒條件。沙伊姆弗勒條件是通過(guò)傾斜對(duì)象平面和圖像平面(如圖7所示)來(lái)擴(kuò)展機(jī)器視覺(jué)系統(tǒng)所觀察的景深的方式,。如果照此方式使用傳統(tǒng)鏡頭,,則會(huì)產(chǎn)生梯形失真,詳見(jiàn)傳感器的相對(duì)照明,、衰減與光暈,。不過(guò),遠(yuǎn)心鏡頭不會(huì)出現(xiàn)梯形失真,,因?yàn)榉糯蟊堵什粫?huì)隨景深更改,。但是,,我們?cè)谛?zhǔn)時(shí)必須小心,因?yàn)椴考⒆鳛閹缀瓮渡溆^察:圓形將投射為橢圓形,,方形將投射為矩形等等,。

圖7:沙伊姆弗勒布局中的1X遠(yuǎn)心鏡頭,具有傾斜的物體和圖像平面,。
(空格分隔,最多3個(gè),單個(gè)標(biāo)簽最多10個(gè)字符)

會(huì)員.png) 10
10
立即詢價(jià)
您提交后,,專屬客服將第一時(shí)間為您服務(wù)