聯(lián)系電話

上海滬怡電氣科技有限公司
 中級會員·14年
中級會員·14年
- 聯(lián)系人:
- 袁經(jīng)理
- 電話:
- 021-66059366
- 手機:
- 15000689041
- 傳真:
- 021-66280198
- 地址:
- 上海市普陀區(qū)常和路100號
- 個性化:
- www.shhuydq.com
- 網(wǎng)址:
- www.shhuy.com
掃一掃訪問手機商鋪
本文分析了移相PWM控制串聯(lián)諧振逆變器的實現(xiàn),。通過改變移相角來調(diào)節(jié)傳送給負(fù)載的功率,,對功率MOSFET輸出電容的影響,提出了一種控制方案以確保功率器件在各種負(fù)載條件下實現(xiàn)ZVS,,保證全橋拓?fù)浣Y(jié)構(gòu)中MOSFET的柔性切換,,使開關(guān)頻率緊密地跟隨諧振頻率,使逆變器工作在功率因數(shù)接近1的準(zhǔn)諧振狀態(tài),。本文闡明了一種控制策略,,提出了在各種負(fù)載條件下獲得ZVS的實現(xiàn)方法。通過改變移相角進(jìn)行輸出功率的調(diào)節(jié),,改變開關(guān)頻率去確保ZVS狀態(tài),。設(shè)計者可以依據(jù)負(fù)載的不同要求及不同的應(yīng)用場**用該控制方法。
1 移相控制串聯(lián)諧振逆變器工作原理
全橋架構(gòu)的串聯(lián)諧振逆變器如圖1所示,。4個開關(guān)管S1~S4,,分別以50%的占空比開通,其中S1及S4為基準(zhǔn)臂開關(guān),,S2及S3為移相臂開關(guān),,每個橋臂上的功率管以180°的相位差開通與關(guān)斷,兩個橋臂開關(guān)的驅(qū)動信號之間相差一個相位角φ,,控制時序如圖2所示,。使輸出的正負(fù)交替電壓之間插入一個箝位到零點的電壓值,這樣只要改變相位角φ就可以相應(yīng)改變輸出電壓的有效值,,zui終達(dá)到調(diào)節(jié)輸出功率的目的,。當(dāng)采用移相調(diào)功方法時,電路的工作頻率變化較小,,具有良好的負(fù)載適應(yīng)性,。特別是當(dāng)負(fù)載阻抗具有較高品質(zhì)因數(shù)時,其調(diào)功范圍內(nèi)頻率變化更小[1],。
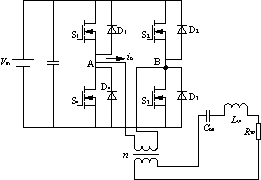
圖1 串聯(lián)諧振逆變器主電路
當(dāng)工作頻率在諧振頻率之上,,即負(fù)載呈現(xiàn)感性狀態(tài),負(fù)載電流io落后于準(zhǔn)方波電壓vAB,,如圖2所示,。要實現(xiàn)功率管的零電壓開通,必須要有足夠的能量用來抽走將要開通的開關(guān)管的輸出電容上的電荷;并給同一橋臂要關(guān)斷的開關(guān)管的結(jié)電容充電。開關(guān)管輸出電容放電結(jié)束后二極管續(xù)流,,此時給出驅(qū)動信號,,開關(guān)管將在零電壓狀態(tài)開通。如果開關(guān)頻率緊跟諧振點頻率保持恒定,,由于φ角的增大,,負(fù)載電流在S3開通前變成正相,ZVS將不能實現(xiàn),。為了防止失去ZVS狀態(tài),,應(yīng)確保開關(guān)管輸出電容的*放電,所以控制器需要提高開關(guān)頻率,,在S3開通前去獲得更大的負(fù)相負(fù)載電流,。本系統(tǒng)利用了電路上的寄生元件,使得全橋架構(gòu)中的4個開關(guān)器件都能運行于零電壓切換,,不僅降低了切換損失與開關(guān)應(yīng)力,,也不象硬開關(guān)PWM那樣需要采用緩沖吸收電路[2]。

圖2 工作波形
2 移相控制串聯(lián)諧振逆變器的分析
系統(tǒng)的全橋架構(gòu)等效電路如圖3所示,。由圖3可知下列關(guān)系的存在:
負(fù)載因數(shù)Q=

;
特征阻抗Zo=

;
諧振頻率ω0=

;
頻率標(biāo)么值ωn=

(ωs為開關(guān)頻率),。

圖3 等效電路
準(zhǔn)方波電壓vAB,近似正弦波的負(fù)載電流io,。當(dāng)工作在諧振點之上,,可獲得ZVS,槽路電流以一定的相位α落后于槽路電壓,,如圖2所示,。相位滯后可表示為
α=arg(Zin)=arctan

(1)
式中:Zin為輸入阻抗。
在槽路電壓為正,,槽路電流為負(fù)的時刻,,相差β是決定ZVS實現(xiàn)的基本要素。獲得ZVS的βmin的數(shù)學(xué)表達(dá)式可以從以下電量分析中得到:槽路電流必須足夠大,,能使儲存在S3的能量qcoss釋放,,且在β范圍內(nèi)提供給S4能量,應(yīng)當(dāng)注意qcoss也是Vin儲存在輸出電容Coss中的能量,。根據(jù)這些電量之間的,,βmin可由式(2)得到[3]。
βmin=arccos

(2)
式中:Ip為負(fù)載峰值電流,。
所以實現(xiàn)ZVS所需的頻率是一個輸出電容電量與滿載電流之間的函數(shù);可獲得在失去ZVS狀態(tài)前所允許的zui大相移,,如式(3)所示。
φmax=2(α-βmin)(3)
圖4給出了針對不同負(fù)載值關(guān)于頻率標(biāo)么值ωn的幾條φmax曲線,。

圖4 不同負(fù)載下φmax與ωn的關(guān)系曲線
該曲線展示了假如使用理想開關(guān)器件Coss=0,,即βmin=0時,,對ZVS來講所允許的zui大相移。但對實際應(yīng)用來講,,βmin大于零,,φmax小于理想狀況。通過計算傳送給等效阻抗的功率可以得到輸出功率的表達(dá)式為
Pout=

Req(4)
標(biāo)稱輸出頻率表達(dá)式為
Pn=Pout

(5)
式(4)與式(5)聯(lián)立得
Pn=

Qcos2αcos2

(6)
對功率調(diào)節(jié)而言,,Q值的大小與所允許的zui大相移大小相對應(yīng),。倘若期望的輸出功率由給定的功率要求所限定,為保證功率的恒定,,在低Q值下工作時,,所需的相移角就可能比φmax大,這樣將會失去ZVS狀態(tài),。為減小βmin,增大φmax,,應(yīng)使環(huán)流能量盡量小,,所以,開關(guān)頻率應(yīng)盡可能接近諧振頻率,,在保證ZVS條件下,,可以通過工作在比諧振頻率略高的頻率級別,即通過使負(fù)載工作在感性條件下來解決,。
3 控制目標(biāo)及策略
本系統(tǒng)的控制目標(biāo)是,,調(diào)節(jié)輸出功率,并在各種負(fù)載條件下保持ZVS,。
對功率調(diào)節(jié)來講,,如果對于各種負(fù)載條件下,βmin已知,,一種利用開關(guān)頻率和移相的調(diào)功方法可以用式(1),、式(2)、式(3)和式(6)迭代后獲得,。因此,,本文提出了一種確保在各種負(fù)載條件下實現(xiàn)ZVS的控制策略,包含3種簡化控制實現(xiàn)的選擇,,即固定β相位控制;固定β時間控制與隨峰值電流補償β時間控制,。
zui簡單的實現(xiàn)方法是為適合于zui壞的負(fù)載狀況,即調(diào)節(jié)β為一個恒定的相位值βfixed,。βfixed是保證ZVS狀況下,,對負(fù)載變化范圍中所需要的βmin的zui大值,它可以通過式(2)獲得,。在保證ZVS的zui低Q值處將產(chǎn)生βmin的zui大值,,因為,,此時槽路電流zui小。給定Pn,,Q和βfixed,,可通過式(1)、式(3)和式(6)迭代獲得ωn和φ,。所選擇的Pn值應(yīng)當(dāng)是對于負(fù)載變化范圍中的zui大值,,從而減小環(huán)流能量損失。較大的Pn值意味著開關(guān)頻率將緊隨諧振點頻率和較大的Zo,。但這將導(dǎo)致大的開通率,,并減小了次級電容峰值電壓,從而允許低電壓等級的次級電容的應(yīng)用,。
分析表明,,固定β時間的調(diào)節(jié)較之固定β相位調(diào)節(jié)只是稍稍改善了逆變器的功率因數(shù)。對于固定相位控制來講,,α只是比固定時間控制略大,。隨著負(fù)載參數(shù)的增大,對固定相位控制來講tβ增大,,然而對于固定時間控制,,tβ和預(yù)期一樣保持恒量。因此,,固定時間控制對于tβ是理想的,,即tβfixed=βfixed/ωn。把歸一化時間轉(zhuǎn)化為實際的時間時,,tβ需要乘以

,。選擇一個較高的Pn是為了得到更高的歸一化頻率。因為逆變器將進(jìn)一步地工作在諧振點附近,。在這種狀態(tài)下的控制策略將確保ZVS,。
在此,我們選擇隨峰值電流補償β時間控制的方式,。tβ不再被一個固定的時間值而是由變化的時間策略所控制,。在這種實現(xiàn)方式下,隨著Q值的增大,,槽路峰值電流Ip會隨之增大,。對于更高的峰值電流tβ可能會減小,這個與負(fù)載峰值電流有的β可由式(2)體現(xiàn),。一個控制系統(tǒng)應(yīng)能實現(xiàn)隨著負(fù)載峰值電流的增大而自動減小tβfixed的初始值,。控制根據(jù)式(7)來實現(xiàn),。
tβ=tβfixed-KIp(7)
式中:Ip為峰值電流;
K為增益,。
圖5表示,,當(dāng)固定Q值時,采用峰值電流補償控制,,與固定時間或固定相位控制方法相比較,,功率因數(shù)有了進(jìn)一步的提高(α相對小),。

圖5 采用不同控制時
