目錄:北京津發(fā)科技股份有限公司>>行為表情與動(dòng)作>> ErgoLAB Motion人體動(dòng)作姿態(tài)分析模塊






| 參考價(jià) | 面議 |
| 參考價(jià) | 面議 |
更新時(shí)間:2025-03-13 12:06:50瀏覽次數(shù):1095評(píng)價(jià)
聯(lián)系我們時(shí)請(qǐng)說(shuō)明是化工儀器網(wǎng)上看到的信息,,謝謝!
| 產(chǎn)地類(lèi)別 | 國(guó)產(chǎn) | 應(yīng)用領(lǐng)域 | 道路/軌道/船舶,汽車(chē)及零部件,綜合 |
|---|
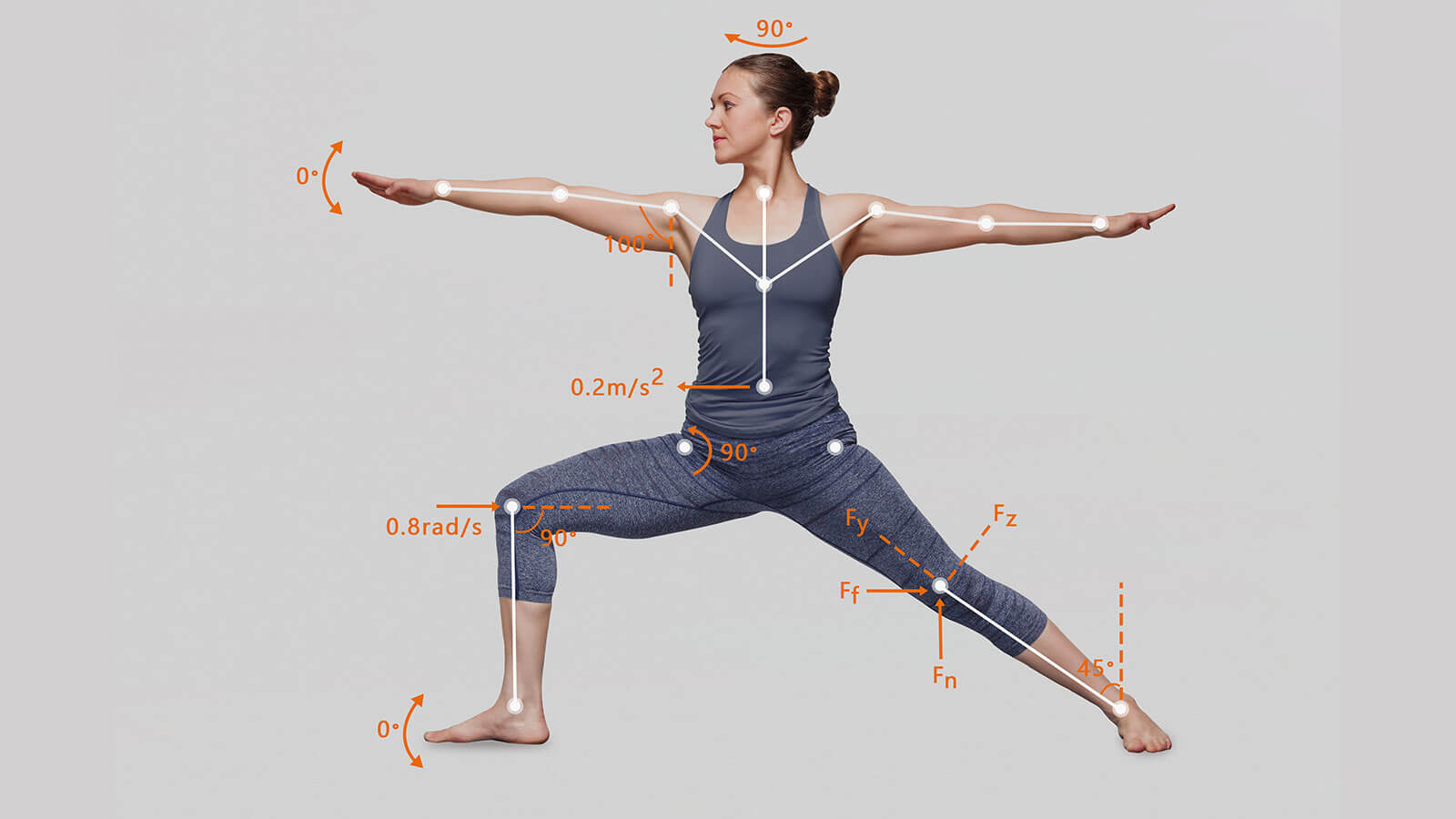
動(dòng)作捕捉系統(tǒng)用于準(zhǔn)確測(cè)量運(yùn)動(dòng)物體在三維空間中的運(yùn)動(dòng)狀態(tài)與空間位置,。ErgoLAB Motion是的全新可穿戴運(yùn)動(dòng)捕捉與人機(jī)工效/生物力學(xué)分析系統(tǒng),配備可穿戴人因記錄儀,,便于攜帶,,非常適用于各種虛擬現(xiàn)實(shí)應(yīng)用與實(shí)時(shí)的現(xiàn)場(chǎng)人因工效科學(xué)研究,如安全生產(chǎn),、人機(jī)交互,、運(yùn)動(dòng)分析,動(dòng)作姿勢(shì)傷害評(píng)估等,。



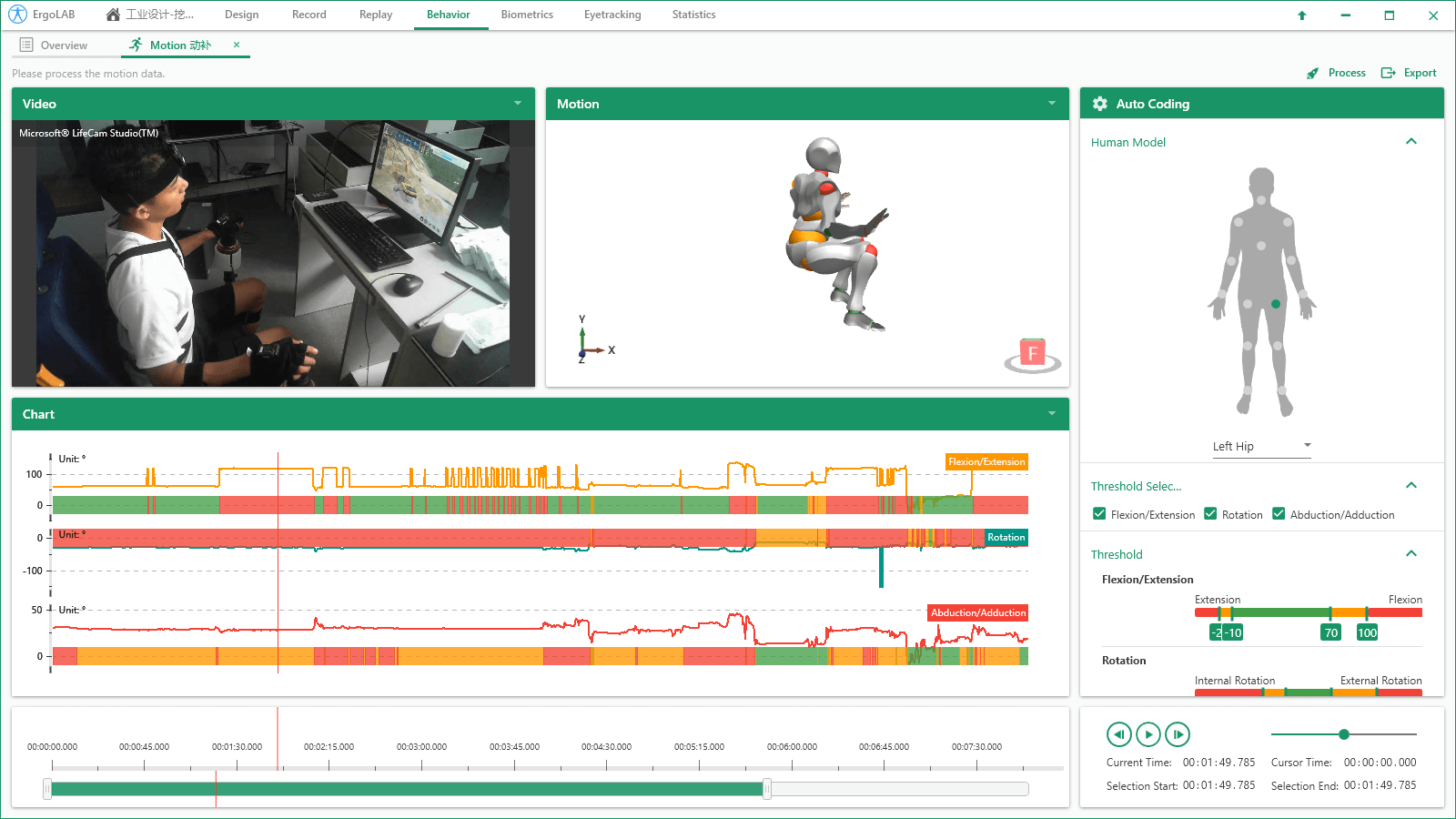

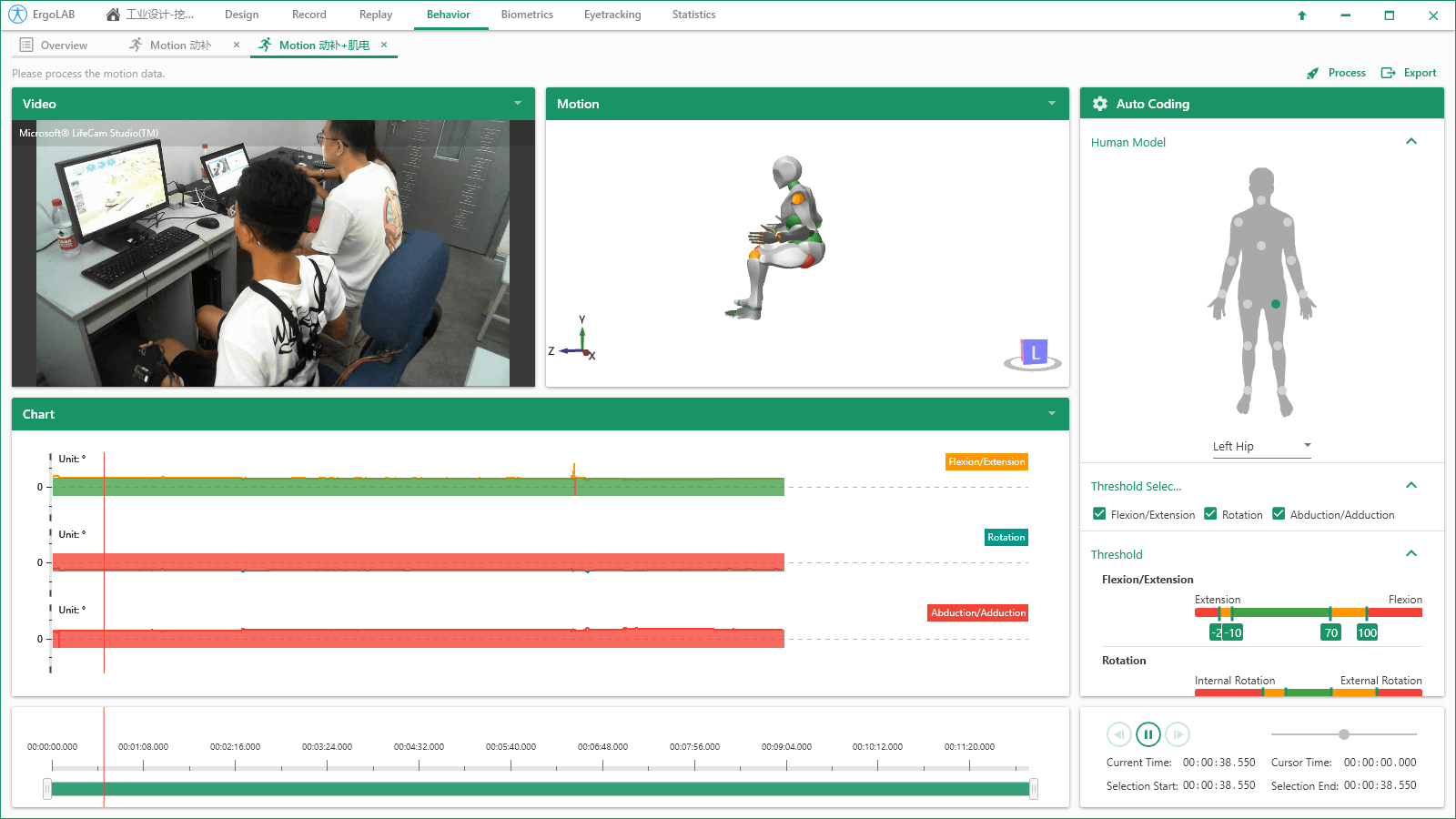
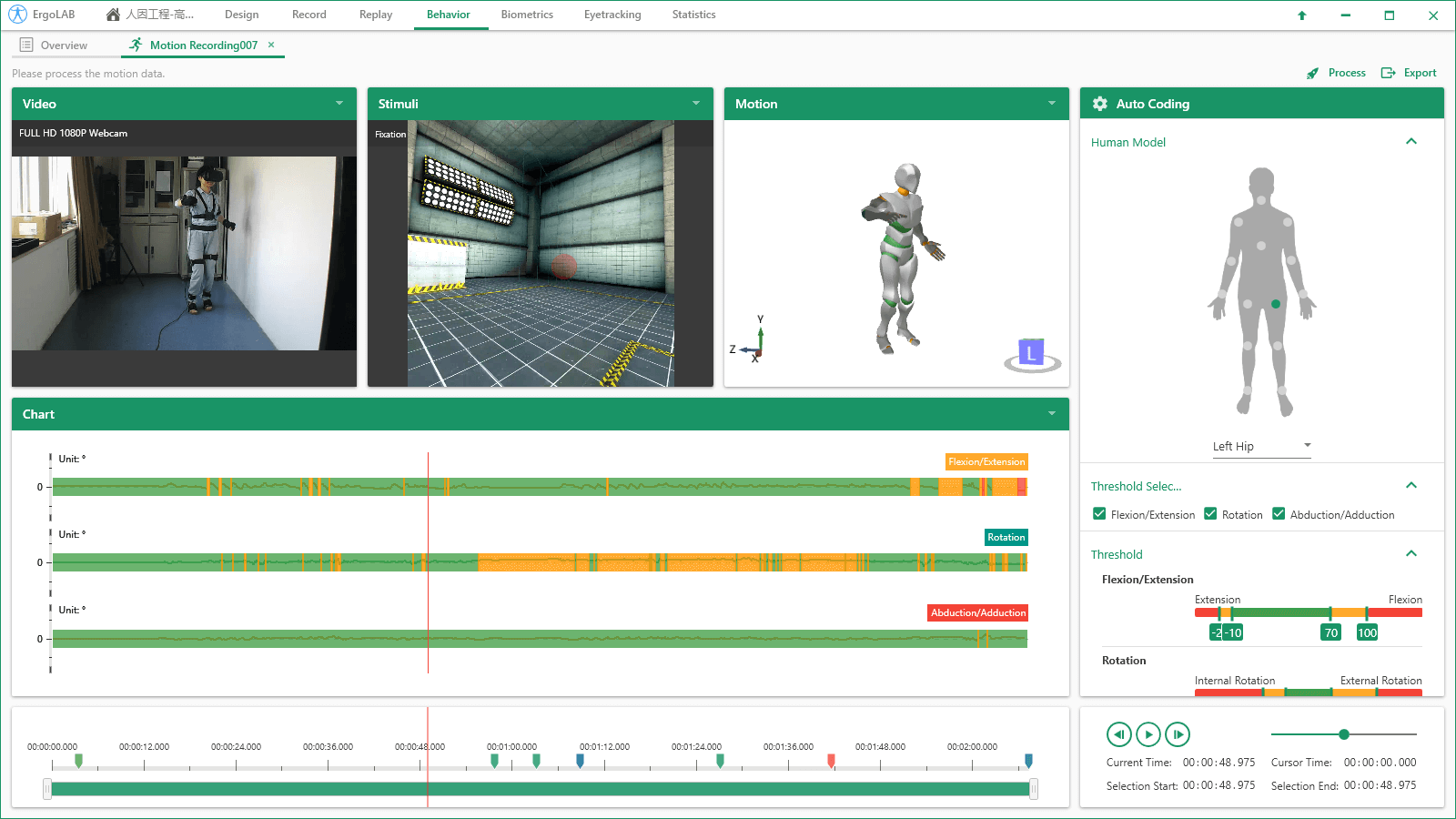
ErgoLAB人機(jī)環(huán)境同步云平臺(tái)可人-機(jī)-環(huán)境多維度數(shù)據(jù)的同步采集與綜合分析,,包括眼動(dòng)追蹤,、生理測(cè)量、生物力學(xué),、腦電,、腦成像、行為,、人機(jī)交互,、動(dòng)作姿態(tài)、面部表情,、主觀評(píng) 價(jià),、時(shí)空行為、模擬器,、物理環(huán)境等,,為科學(xué)研究及應(yīng)用提供完整的數(shù)據(jù)指標(biāo)。平臺(tái)可完成完整的實(shí)驗(yàn)和測(cè)評(píng)流程,,包括項(xiàng)目管理-試驗(yàn)設(shè)計(jì)-同步采集-信號(hào)處理-數(shù)據(jù)分析-人工智能應(yīng)用-可視化報(bào)告,,支持基于云架構(gòu)技術(shù)的團(tuán)體測(cè)試和大數(shù)據(jù)云管理。

(空格分隔,最多3個(gè),單個(gè)標(biāo)簽最多10個(gè)字符)


會(huì)員.png) 12
12






 化工儀器網(wǎng)
化工儀器網(wǎng)