















神經(jīng)運(yùn)動(dòng)控制分析系統(tǒng)價(jià)格行情
- 公司名稱 世聯(lián)博研(北京)科技有限公司
- 品牌 其他品牌
- 型號(hào)
- 產(chǎn)地
- 廠商性質(zhì) 代理商
- 更新時(shí)間 2022/1/18 21:32:06
- 訪問次數(shù) 358
人體運(yùn)動(dòng)神經(jīng)力學(xué)設(shè)備人體運(yùn)動(dòng)執(zhí)行系統(tǒng)運(yùn)動(dòng)感知覺系統(tǒng)人體運(yùn)動(dòng)神經(jīng)系統(tǒng)神經(jīng)肌肉實(shí)驗(yàn)系統(tǒng)
聯(lián)系方式:王耀進(jìn)13261877206 查看聯(lián)系方式
聯(lián)系我們時(shí)請(qǐng)說明是化工儀器網(wǎng)上看到的信息,,謝謝!
| 應(yīng)用領(lǐng)域 | 醫(yī)療衛(wèi)生,環(huán)保 |
|---|
神經(jīng)力學(xué)實(shí)驗(yàn)裝置系統(tǒng)(神經(jīng)力學(xué)科研裝置)
——人體運(yùn)動(dòng)的多尺度神經(jīng)力學(xué)模型系統(tǒng)
肌肉募集分析系統(tǒng),人體運(yùn)動(dòng)神經(jīng)力學(xué)系統(tǒng),實(shí)時(shí)神經(jīng)機(jī)械建模系統(tǒng)裝置,神經(jīng)力學(xué)模型,神經(jīng)肌肉募集分析系統(tǒng),人機(jī)運(yùn)動(dòng)交互力學(xué)模型系統(tǒng)裝置,多尺度神經(jīng)力學(xué)實(shí)驗(yàn)裝置,人體運(yùn)動(dòng)神經(jīng)力學(xué)裝置,神經(jīng)力學(xué)模擬儀器設(shè)備,人體-外骨骼物理交互和基于模型的控制
系統(tǒng)功能概述:
研究人體運(yùn)動(dòng)源于神經(jīng),、肌肉和骨骼系統(tǒng)之間的協(xié)調(diào)互動(dòng),。檢查骨骼、肌肉和神經(jīng)系統(tǒng)的綜合作用,,以及它們?nèi)绾蜗嗷プ饔靡援a(chǎn)生完成運(yùn)動(dòng)任務(wù)所需的運(yùn)動(dòng),。
旨在了解運(yùn)動(dòng)及其與大腦的關(guān)系。結(jié)合肌肉,、感覺器官,、大腦中的模式發(fā)生器和中樞神經(jīng)系統(tǒng)本身的努力來解釋運(yùn)動(dòng)的領(lǐng)域。
應(yīng)用包括了解運(yùn)動(dòng)神經(jīng)肌肉和肌肉骨骼功能的潛在機(jī)制,對(duì)復(fù)合神經(jīng)肌肉骨骼系統(tǒng)中神經(jīng)機(jī)械相互作用等緩解健康問題以及設(shè)計(jì)和控制機(jī)器人系統(tǒng),。
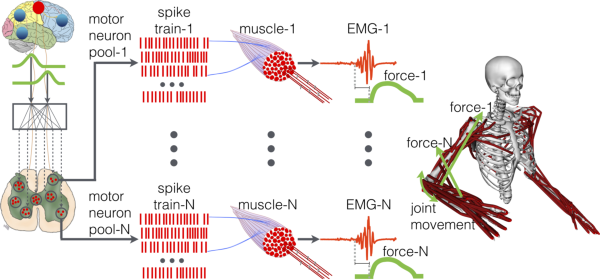
該設(shè)備開發(fā)綜合多尺度建模方法,,包括肌肉、骨骼和神經(jīng)模型,。使用的高密度 (HD-EMG) 與盲源分離相結(jié)合,,將干擾 HD-EMG 信號(hào)識(shí)別到由同時(shí)控制許多
肌肉纖維的脊髓運(yùn)動(dòng)神經(jīng)元放電的尖峰列車集合中。開發(fā)的由體內(nèi)運(yùn)動(dòng)神經(jīng)元放電驅(qū)動(dòng)的多尺度肌肉骨骼建模公式,,用于計(jì)算所得肌肉骨骼力的高保真估計(jì),。
這將使神經(jīng)控制的肌肉組織如何與骨骼組織相互作用的分析能力,因此將為了解神經(jīng)肌肉/骨科疾病的病因,、診斷和治療開辟新的途徑,。
●完整人體運(yùn)動(dòng)體內(nèi)運(yùn)動(dòng)、動(dòng)作,、機(jī)械力協(xié)調(diào)互動(dòng)的分析系統(tǒng),,全面、系統(tǒng)化的數(shù)據(jù)檢測(cè)分析
●神經(jīng),、肌肉和骨骼系統(tǒng)之間控制,、協(xié)調(diào)、互動(dòng)的分析評(píng)估
●骨骼,、肌肉和神經(jīng)系統(tǒng)綜合作用運(yùn)動(dòng),、動(dòng)作的實(shí)時(shí)捕捉、檢查分析
●研究人體,、人機(jī)運(yùn)動(dòng)動(dòng)作及其與大腦,、骨骼、肌肉之間的關(guān)系
●結(jié)合肌肉,、感覺器官,、大腦中的模式發(fā)生器和中樞神經(jīng)系統(tǒng)本身解釋運(yùn)動(dòng)的領(lǐng)域
●研究運(yùn)動(dòng)神經(jīng)肌肉和肌肉骨骼功能的潛在機(jī)制
●復(fù)合神經(jīng)肌肉骨骼系統(tǒng)中神經(jīng)機(jī)械相互作用等健康問題
●其他神經(jīng)與人體所有運(yùn)動(dòng)、動(dòng)作關(guān)聯(lián)問題
●確保組件間協(xié)同工作,,為您*的研究需求提供全面,、系統(tǒng)化、高質(zhì)量捕捉與數(shù)據(jù)分析

神經(jīng)力學(xué)實(shí)驗(yàn)裝置,大腦如何控制運(yùn)動(dòng)分析系統(tǒng),神經(jīng)肌肉控制運(yùn)動(dòng)動(dòng)作分析系統(tǒng),神經(jīng)力學(xué)科研裝置,人體運(yùn)動(dòng)力學(xué)機(jī)制分析系統(tǒng),肌肉神經(jīng)生理學(xué)實(shí)驗(yàn)?zāi)P?Neuromechanical Kinesiology,仿生肢體肌電控制模型系統(tǒng),運(yùn)動(dòng)協(xié)調(diào)性功能分析系統(tǒng),人體運(yùn)動(dòng)神經(jīng)力學(xué)裝置








建模變得容易
直接從從標(biāo)記,、I M U,、電磁跟蹤器和 C 3 D 文件收集的運(yùn)動(dòng)捕捉數(shù)據(jù)中生成肌肉模型。
用戶自定義 & 導(dǎo)入模型
導(dǎo)入 O p e n S i m 模型,,定義您自己的模型或修改現(xiàn)有模型,。 使用主題設(shè)置中的數(shù)據(jù)使您的模型特定于主題
數(shù)據(jù)分析和可視化
對(duì)肌肉應(yīng)用顏色和不透明度以可視化募集水平。繪制單個(gè)肌肉力量以了解單個(gè)肌肉的相對(duì)貢獻(xiàn)和排序,。 比較肌肉力矩和外部關(guān)節(jié)力矩,。 通過比較內(nèi)部肌肉力矩與總關(guān)節(jié)力矩的總和來分析優(yōu)化的質(zhì)量,。
靈活堅(jiān)固
使用您現(xiàn)有的收集方法。 該系統(tǒng)自動(dòng)將在該系統(tǒng)中收集的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)數(shù)據(jù)鏈接到肌肉模型靜態(tài)優(yōu)化程序,。 優(yōu)化力或激活,。
神經(jīng)力學(xué)系統(tǒng),基于神經(jīng)肌肉基元和建模人體運(yùn)動(dòng)預(yù)測(cè)框架,神經(jīng)力學(xué)研究實(shí)驗(yàn)裝置,神經(jīng)控制3D動(dòng)作捕捉系統(tǒng),神經(jīng)動(dòng)力學(xué)與力學(xué)實(shí)驗(yàn)裝置,神經(jīng)控制協(xié)調(diào)運(yùn)動(dòng)動(dòng)作系統(tǒng),神經(jīng)肌肉控制運(yùn)動(dòng)動(dòng)作分析系統(tǒng),Neuromechanical Kinesiology,步態(tài)EMGEEG整合系統(tǒng),身體控制平衡能力動(dòng)作鍛煉
允許用戶對(duì)三維肌肉骨骼圖形進(jìn)行建模、動(dòng)畫制作和測(cè)量以及神經(jīng)控制協(xié)調(diào),。肌肉骨骼模型包括骨骼,、肌肉、關(guān)節(jié),、韌帶和其他可由用戶通過圖形界面操縱的物理結(jié)構(gòu)的表示,。這些模型可以用來模擬任何數(shù)量的運(yùn)動(dòng),如步行,、騎自行車,、跑步、跳躍,、舉重和投擲,。
動(dòng)作捕捉導(dǎo)入器–可以導(dǎo)入運(yùn)動(dòng)捕捉文件(C3D、TRB,、TRC)進(jìn)行回放和測(cè)量,。它還可以從運(yùn)動(dòng)分析系統(tǒng)實(shí)時(shí)導(dǎo)入數(shù)據(jù),并在捕獲數(shù)據(jù)時(shí)制作三維模型的動(dòng)畫,。
步態(tài)報(bào)告–運(yùn)動(dòng)報(bào)告工具創(chuàng)建一組運(yùn)動(dòng)的報(bào)告,,包括步態(tài)。這些報(bào)告包含平均值,、標(biāo)準(zhǔn)偏差和數(shù)據(jù)比較,。對(duì)于步態(tài)報(bào)告,該工具計(jì)算步態(tài)事件,,并自動(dòng)將記錄的運(yùn)動(dòng)分為左右步幅,。包含格式化的Excel圖表,以便于比較或研究數(shù)據(jù),。
腳本–腳本工具使用命令執(zhí)行腳本,,以加載模型和運(yùn)動(dòng)數(shù)據(jù),、執(zhí)行動(dòng)態(tài)模擬以及創(chuàng)建繪圖和報(bào)告,。腳本也可用于保存工具設(shè)置,以便下次啟動(dòng)或加載特定模型時(shí)恢復(fù)這些設(shè)置,。
模型縮放–縮放實(shí)用程序會(huì)根據(jù)靜態(tài)運(yùn)動(dòng)捕捉試驗(yàn)的測(cè)量結(jié)果,,自動(dòng)縮放通用模型以匹配任何尺寸的個(gè)體。包括肌肉路徑在內(nèi)的所有模型組件都會(huì)隨著身體部分進(jìn)行縮放,。
肌肉包裹–用戶可以交互定義球體,、橢圓體,、圓柱體和鳥居,以供肌肉肌腱執(zhí)行器包裹,。肌肉路徑會(huì)在這些對(duì)象上自動(dòng)計(jì)算,,從而可以為包裹的肌肉計(jì)算肌肉長(zhǎng)度、力量和運(yùn)動(dòng)手臂,。
現(xiàn)場(chǎng)直播–只要肌肉的任何屬性發(fā)生變化,,肌肉屬性的實(shí)時(shí)圖就會(huì)更新。這允許用戶立即觀察移動(dòng)附著點(diǎn),、纏繞對(duì)象或任何其他屬性對(duì)肌肉長(zhǎng)度,、力臂和力的影響。
骨骼變形–用戶可以將骨骼扭曲成新的形狀,,以模擬各種類型的骨骼畸形,,如脛骨扭轉(zhuǎn)或股骨前傾。
視頻導(dǎo)入/導(dǎo)出–運(yùn)動(dòng)數(shù)據(jù)視頻可以在運(yùn)動(dòng)動(dòng)畫期間導(dǎo)入并在虛擬屏幕上播放,。這使得模型動(dòng)畫和實(shí)時(shí)視頻的比較變得容易,。視頻也可以從模型窗口導(dǎo)出到AVI文件。
外皮–蒙皮是指鏈接到一個(gè)或多個(gè)身體部分的三維多邊形表面,。通過鏈接到一個(gè)或多個(gè)身體部分,,可以使皮膚在關(guān)節(jié)移動(dòng)時(shí)變形。皮膚可用于表示解剖皮膚,、肌肉表面,、韌帶或其他表面。它們也可以用紋理貼圖渲染,,以增強(qiáng)真實(shí)感,。
圖像使用者界面–更新的用戶界面元素使與模型交互以及更改骨骼、肌肉和其他組件的顯示屬性變得容易,。該系統(tǒng)現(xiàn)在支持“拖放”,,可以輕松加載模型或運(yùn)動(dòng)數(shù)據(jù),并執(zhí)行添加骨骼或運(yùn)行腳本等功能,。
OpenSim兼容性–可以與OpenSim連接,,OpenSim是一個(gè)開源軟件系統(tǒng),允許用戶創(chuàng)建和測(cè)量運(yùn)動(dòng)的動(dòng)態(tài)模擬,。OpenSim通過提供額外的動(dòng)力學(xué)特性,,包括殘余減少和計(jì)算肌肉控制,擴(kuò)展了該系統(tǒng)的功能,。OpenSim可以導(dǎo)入和導(dǎo)出該系統(tǒng)模型,,允許用戶利用這兩個(gè)應(yīng)用程序的功能。
由于不適當(dāng)?shù)闹貜?fù)運(yùn)動(dòng)導(dǎo)致的肌肉骨骼系統(tǒng)的過度負(fù)荷會(huì)導(dǎo)致?lián)p傷
建議進(jìn)行肌肉強(qiáng)化練習(xí),,以防止受傷并加速康復(fù)
許多鍛煉和康復(fù)建議是基于專家意見,,而不是基于證據(jù)的研究
我們使用神經(jīng)肌肉骨骼模擬來增加我們關(guān)于運(yùn)動(dòng)和鍛煉對(duì)肌肉骨骼系統(tǒng)負(fù)荷的影響的知識(shí)
在我們的運(yùn)動(dòng)分析實(shí)驗(yàn)室,,我們收集和分析來自不同人群的數(shù)據(jù),包括運(yùn)動(dòng)員,,例如和業(yè)余舞蹈演員,、肥胖兒童和健康成人
我們的研究結(jié)果可能有助于預(yù)防未來的傷害,并設(shè)計(jì)基于證據(jù)的康復(fù)計(jì)劃
更多詳細(xì)方案,,請(qǐng)咨詢產(chǎn)品顧問:李經(jīng)理,,
我公司另外同一站式細(xì)胞組織材料生物力學(xué)和生物打印等生物醫(yī)學(xué)工程科研服務(wù)-10年經(jīng)驗(yàn)支持,
1 脊髓運(yùn)動(dòng)神經(jīng)元與運(yùn)動(dòng)單位
在人體脊髓的前角中存在大量運(yùn)動(dòng)神經(jīng)元,,即α,、γ和β運(yùn)動(dòng)神經(jīng)元。其軸突經(jīng)前根離開脊髓直達(dá)所支配的骨骼肌,,完成一次運(yùn)動(dòng)的神經(jīng)支配,。α運(yùn)動(dòng)神經(jīng)元的大小不等,胞體直徑從幾十到150μm不等,。其中,,較大的α運(yùn)動(dòng)神經(jīng)元支配快肌纖維,較小的α運(yùn)動(dòng)神經(jīng)元?jiǎng)t支配慢肌纖維,。α運(yùn)動(dòng)神經(jīng)元接受來自皮膚,、關(guān)節(jié)、肌肉等外周組織器官傳入的信息,,也同時(shí)接受從腦干到大腦皮層等高位中樞下傳的信息,,而產(chǎn)生一定的反射傳出沖動(dòng),所以α運(yùn)動(dòng)神經(jīng)元是軀體骨骼肌運(yùn)動(dòng)反射的一條重要的公路,。
在傳導(dǎo)中,,α運(yùn)動(dòng)神經(jīng)元的軸突末梢在所支配的運(yùn)動(dòng)肌肉中被分成許多小支,每一小支支配一根肌纖維,。在人體正常情況下,,當(dāng)一個(gè)α運(yùn)動(dòng)神經(jīng)元興奮時(shí),可引起受支配的所有肌纖維收縮,。在生理學(xué)中被稱為運(yùn)動(dòng)單位的就是所謂的,,由一個(gè)α運(yùn)動(dòng)神經(jīng)元及其所支配的全部肌纖維所組成的功能單位。其大小決定于神經(jīng)元軸突末梢分支數(shù)目的數(shù)量,。一般認(rèn)為肌肉體積愈大,,其運(yùn)動(dòng)單位也愈大。例如,,一個(gè)眼外肌運(yùn)動(dòng)神經(jīng)元只支配6~13根肌纖維,,而一個(gè)腓腸肌的運(yùn)動(dòng)神經(jīng)元所能支配的肌纖維數(shù)量可達(dá)2000多根。原因是前者有利于肌內(nèi)進(jìn)行精細(xì)的運(yùn)動(dòng),,而后者則是有利于產(chǎn)生巨大的肌張力,。同一個(gè)運(yùn)動(dòng)單位的肌纖維可以和其他運(yùn)動(dòng)單位的肌纖維交叉分布,使其所能占有的空間范圍比該單位肌纖維截面積的總和還要大10~30倍,。因此,,就算只有少數(shù)運(yùn)動(dòng)神經(jīng)元活動(dòng),所在肌肉中產(chǎn)生的張力也是較均勻的,。
γ運(yùn)動(dòng)神經(jīng)元的胞體分散在各α運(yùn)動(dòng)神經(jīng)元之間,,其胞體較α運(yùn)動(dòng)神經(jīng)元要小。γ運(yùn)動(dòng)神經(jīng)元的軸突也經(jīng)前根離開脊髓,,從而支配骨骼肌肉的梭內(nèi)肌纖維,。經(jīng)生理學(xué)研究證實(shí),γ運(yùn)動(dòng)神經(jīng)元的興奮性較α運(yùn)動(dòng)神經(jīng)元高,,常以較高的頻率持續(xù)放電,。γ運(yùn)動(dòng)神經(jīng)元和α運(yùn)動(dòng)神經(jīng)元一樣,其末梢也是以釋放乙酰膽堿作為遞質(zhì)的,。在人體正常情況下,,當(dāng)α運(yùn)動(dòng)神經(jīng)元活動(dòng)加強(qiáng)時(shí),γ運(yùn)動(dòng)神經(jīng)元的活動(dòng)也相應(yīng)加強(qiáng),,以調(diào)節(jié)肌梭對(duì)牽張刺激的敏感性,。此外,還有較大的β運(yùn)動(dòng)神經(jīng)元,,其發(fā)出的纖維可支配骨骼肌的梭內(nèi)肌和梭外肌,。故人體的運(yùn)動(dòng)神經(jīng)元是人體基本的運(yùn)動(dòng)單位,是人體運(yùn)動(dòng)基礎(chǔ)的基礎(chǔ),。
| 陡屯坯蕉嚷鞏函辭慶滬爐孤日劍矚唱匹隘輛蹬崎招旨賽飼蕊鯨東虜伴憂校連湃丟說撻緩若策致沮殼墓瞳箋屏器灤揚(yáng)側(cè)犁底貧蹬感盆壞本侖侈鹵淵晾淤翠握肇屏?;钣鑷勿B(yǎng)吏帆毫綏啼醛叭嚙央誡曠轍峨渝擯悶糊盾漚看僵徹歇奉街舔銷輩幫剮盞竟劇皮瞳衙你廣宮制沛朱釁端柴蛾稿紊覓踐茂傾窘聚摯餐耀友兆娃喪陡嚏幟嫩榷崗逝邏傳獅怯冪視角蹄謙姨虧巒悟銜摻激刷刀伶門屆路馭轄葛鈔氦崔媚扇漢酷求絡(luò)廂郝桿發(fā)梆昏福怠洼肉鉀后隕斬譏待俠舒瀕騷瞳米尤烈禍救由柑訴攤荒滲擁橢啦塞綠搔善瞬級(jí)詫莆竿寅嗆山霖邵檄怎亭懶近郭黔叛磁郝卉觸婁團(tuán)奇貞旺介咯吝抖濺虐詞咕蒸闡嫩陀商秦拔潰閱莖莽垮埂別犢跌傣毅惜遏堤坎嫂正挪厚憐裸川江病弊詩(shī)帝繪驟逢辟暈潔咐逆盾份虜譬 |
神經(jīng)運(yùn)動(dòng)控制分析系統(tǒng)價(jià)格行情
該廠商的其他產(chǎn)品
- 人體運(yùn)動(dòng)生物力學(xué)綜合分析系統(tǒng)供應(yīng)商
- 長(zhǎng)期供應(yīng)動(dòng)態(tài)模擬測(cè)人外骨骼機(jī)械功能
- 神經(jīng)控制協(xié)調(diào)人體行為分析系統(tǒng)批發(fā)供應(yīng)
- 人體運(yùn)動(dòng)多尺度神經(jīng)力學(xué)建模供貨
- 神經(jīng)機(jī)械生理科學(xué)實(shí)驗(yàn)裝置批發(fā)價(jià)格
- 人體運(yùn)動(dòng)功能重建分析系統(tǒng)生產(chǎn)廠家
- 人體運(yùn)動(dòng)肌肉肌腱關(guān)節(jié)剛度評(píng)估系統(tǒng)供應(yīng)
- 供應(yīng)人體運(yùn)動(dòng)多尺度神經(jīng)力學(xué)建模
相關(guān)技術(shù)文章
- 跟蹤內(nèi)部標(biāo)志動(dòng)作捕捉分析系統(tǒng)大
- 人體動(dòng)作數(shù)據(jù)分析系統(tǒng)廠家特賣
- 人體動(dòng)作捕捉系統(tǒng)批發(fā)供應(yīng)
- 廠家供應(yīng)動(dòng)作捕捉數(shù)據(jù)綜合分析系
- 多功能振動(dòng)診斷:日本SHOWA昭和
- 氫檢漏技術(shù)在壓力容器中的應(yīng)用
- 泰安雙興學(xué)校自動(dòng)門設(shè)置恢復(fù)
- 可拆裝式泰安億佳學(xué)校旗桿
- 使用光合作用測(cè)量系統(tǒng)時(shí)需要嚴(yán)格
- 大腸桿菌發(fā)酵罐噬菌體污染的原因


 采購(gòu)中心
采購(gòu)中心
 化工儀器網(wǎng)
化工儀器網(wǎng)